
一种焊缝跟踪装置及焊接方法.pdf

春景****23

1/7
2/7
3/7

4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种焊缝跟踪装置及焊接方法.pdf
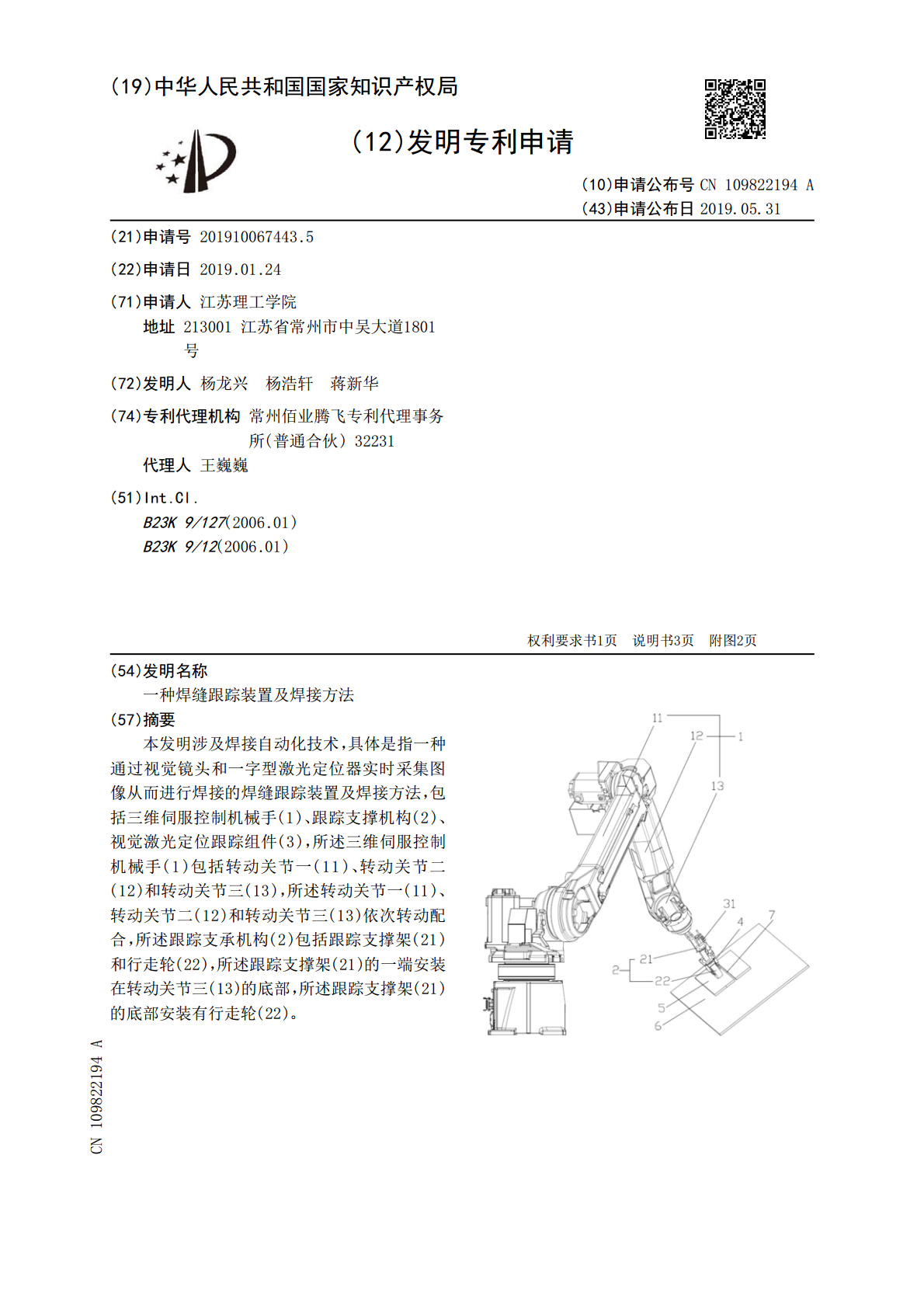
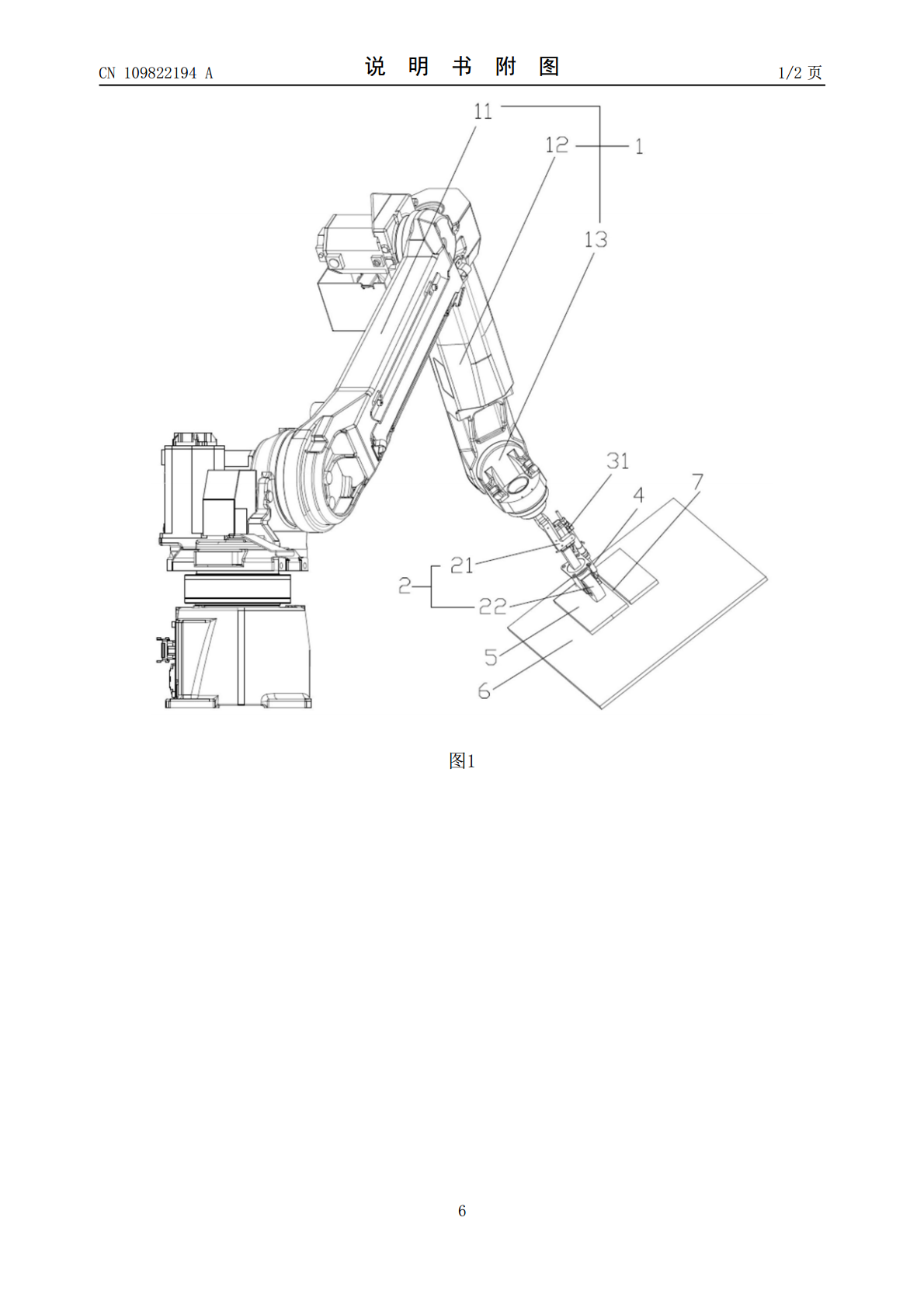
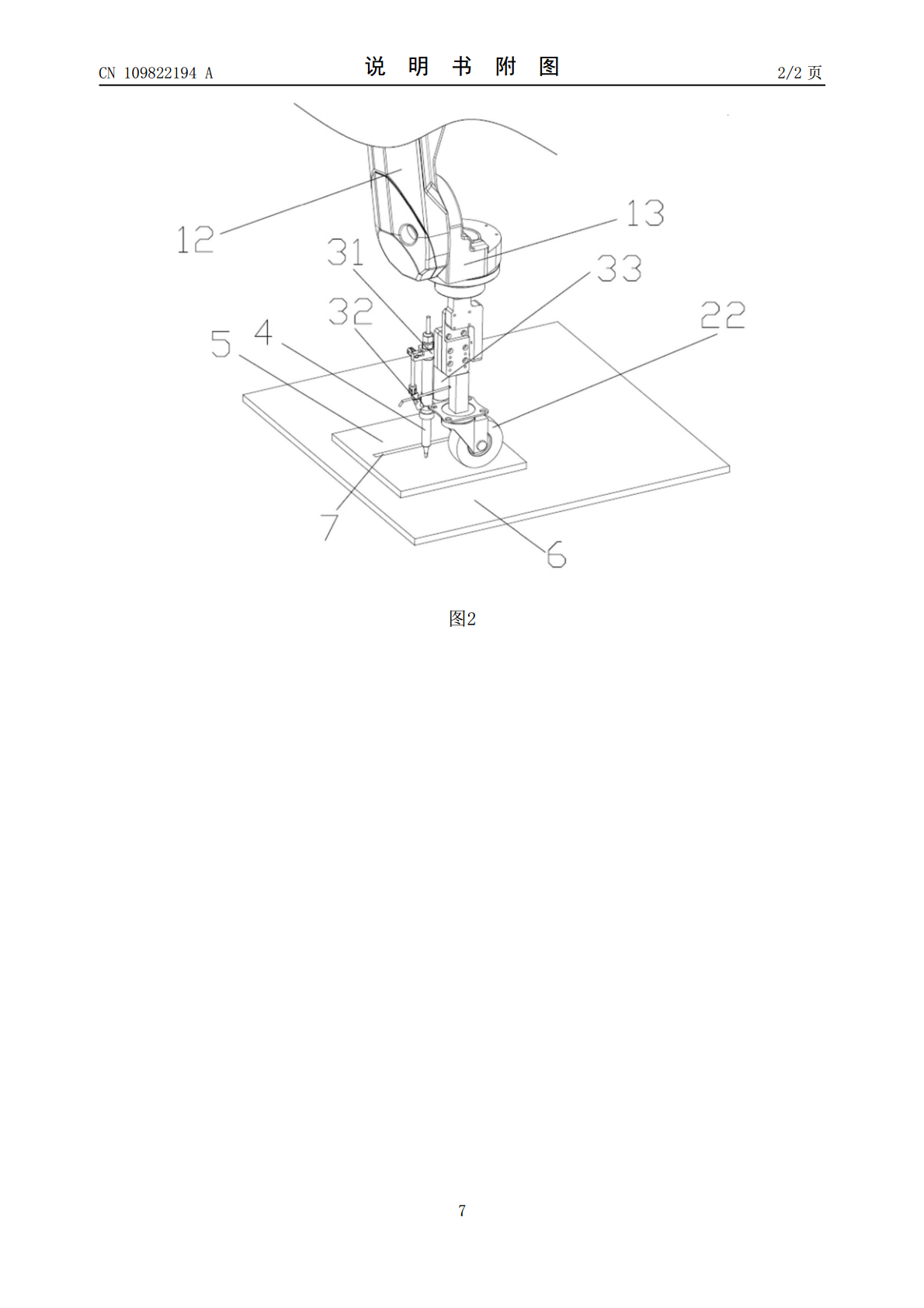
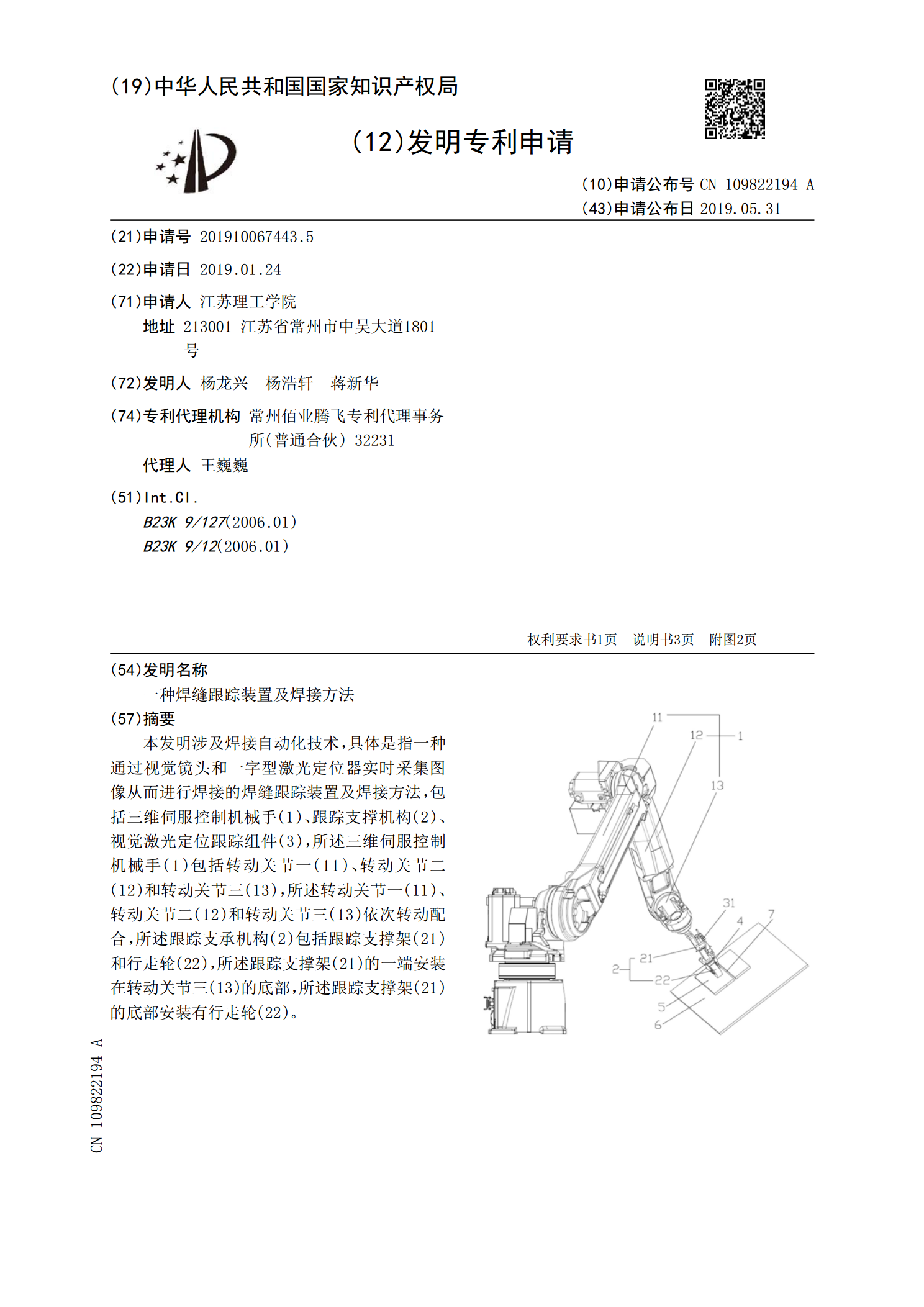
本发明涉及焊接自动化技术,具体是指一种通过视觉镜头和一字型激光定位器实时采集图像从而进行焊接的焊缝跟踪装置及焊接方法,包括三维伺服控制机械手(1)、跟踪支撑机构(2)、视觉激光定位跟踪组件(3),所述三维伺服控制机械手(1)包括转动关节一(11)、转动关节二(12)和转动关节三(13),所述转动关节一(11)、转动关节二(12)和转动关节三(13)依次转动配合,所述跟踪支承机构(2)包括跟踪支撑架(21)和行走轮(22),所述跟踪支撑架(21)的一端安装在转动关节三(13)的底部,所述跟踪支撑架(21)的
一种焊缝跟踪焊接装置.pdf
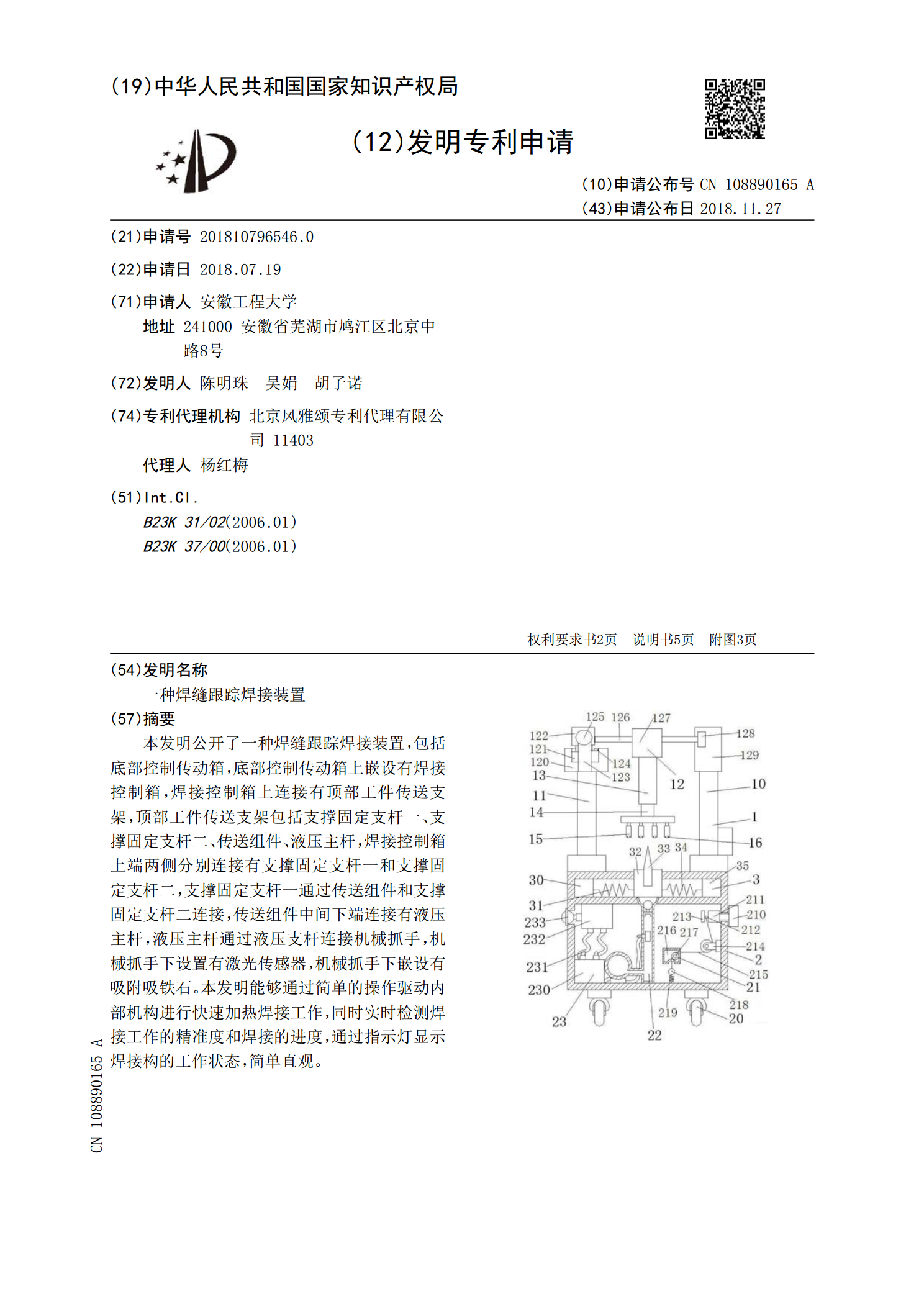
本发明公开了一种焊缝跟踪焊接装置,包括底部控制传动箱,底部控制传动箱上嵌设有焊接控制箱,焊接控制箱上连接有顶部工件传送支架,顶部工件传送支架包括支撑固定支杆一、支撑固定支杆二、传送组件、液压主杆,焊接控制箱上端两侧分别连接有支撑固定支杆一和支撑固定支杆二,支撑固定支杆一通过传送组件和支撑固定支杆二连接,传送组件中间下端连接有液压主杆,液压主杆通过液压支杆连接机械抓手,机械抓手下设置有激光传感器,机械抓手下嵌设有吸附吸铁石。本发明能够通过简单的操作驱动内部机构进行快速加热焊接工作,同时实时检测焊接工作的精准
焊接系统及焊缝跟踪方法.pdf
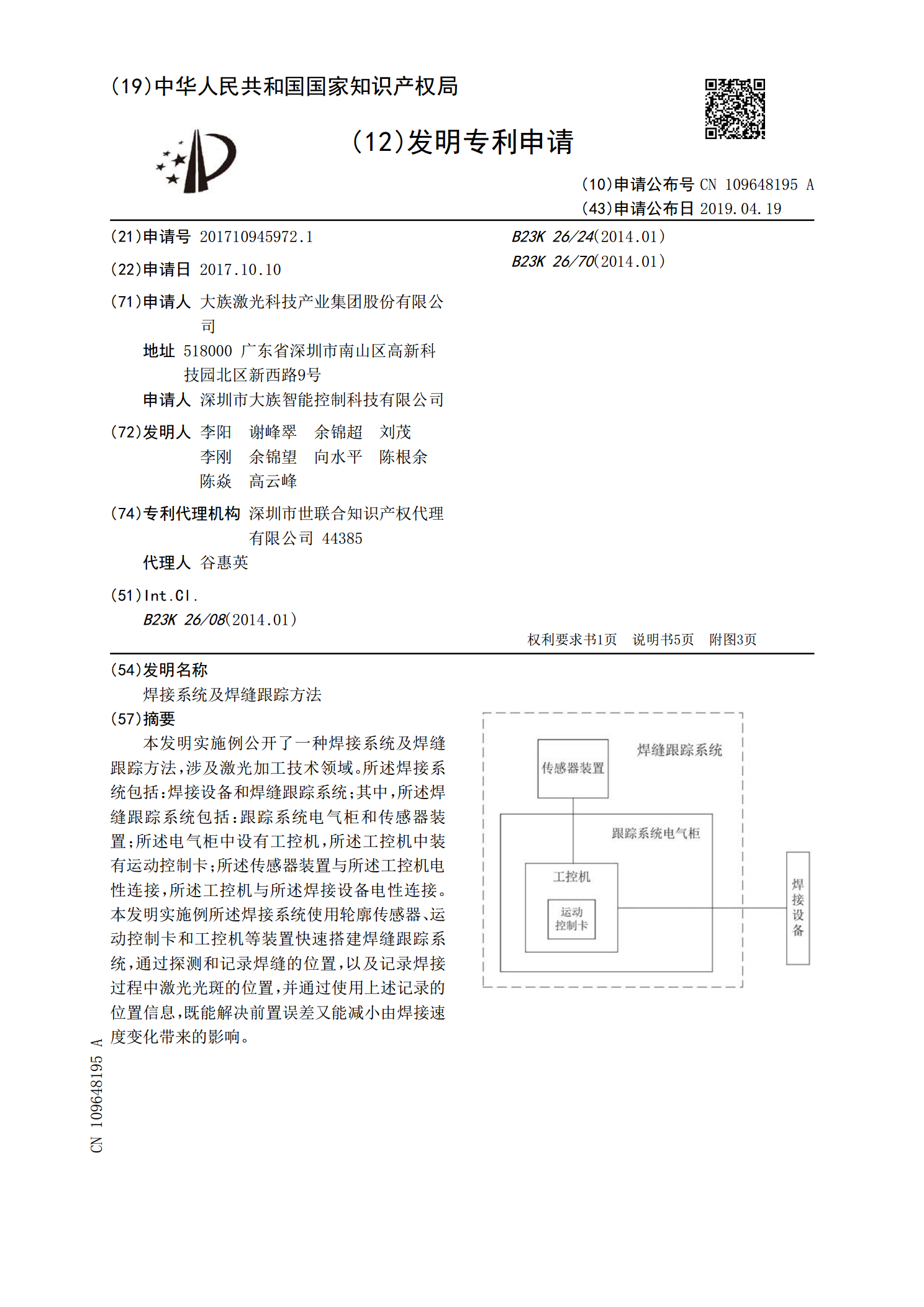
本发明实施例公开了一种焊接系统及焊缝跟踪方法,涉及激光加工技术领域。所述焊接系统包括:焊接设备和焊缝跟踪系统;其中,所述焊缝跟踪系统包括:跟踪系统电气柜和传感器装置;所述电气柜中设有工控机,所述工控机中装有运动控制卡;所述传感器装置与所述工控机电性连接,所述工控机与所述焊接设备电性连接。本发明实施例所述焊接系统使用轮廓传感器、运动控制卡和工控机等装置快速搭建焊缝跟踪系统,通过探测和记录焊缝的位置,以及记录焊接过程中激光光斑的位置,并通过使用上述记录的位置信息,既能解决前置误差又能减小由焊接速度变化带来的影
一种U形肋板焊缝跟踪焊接装置.pdf
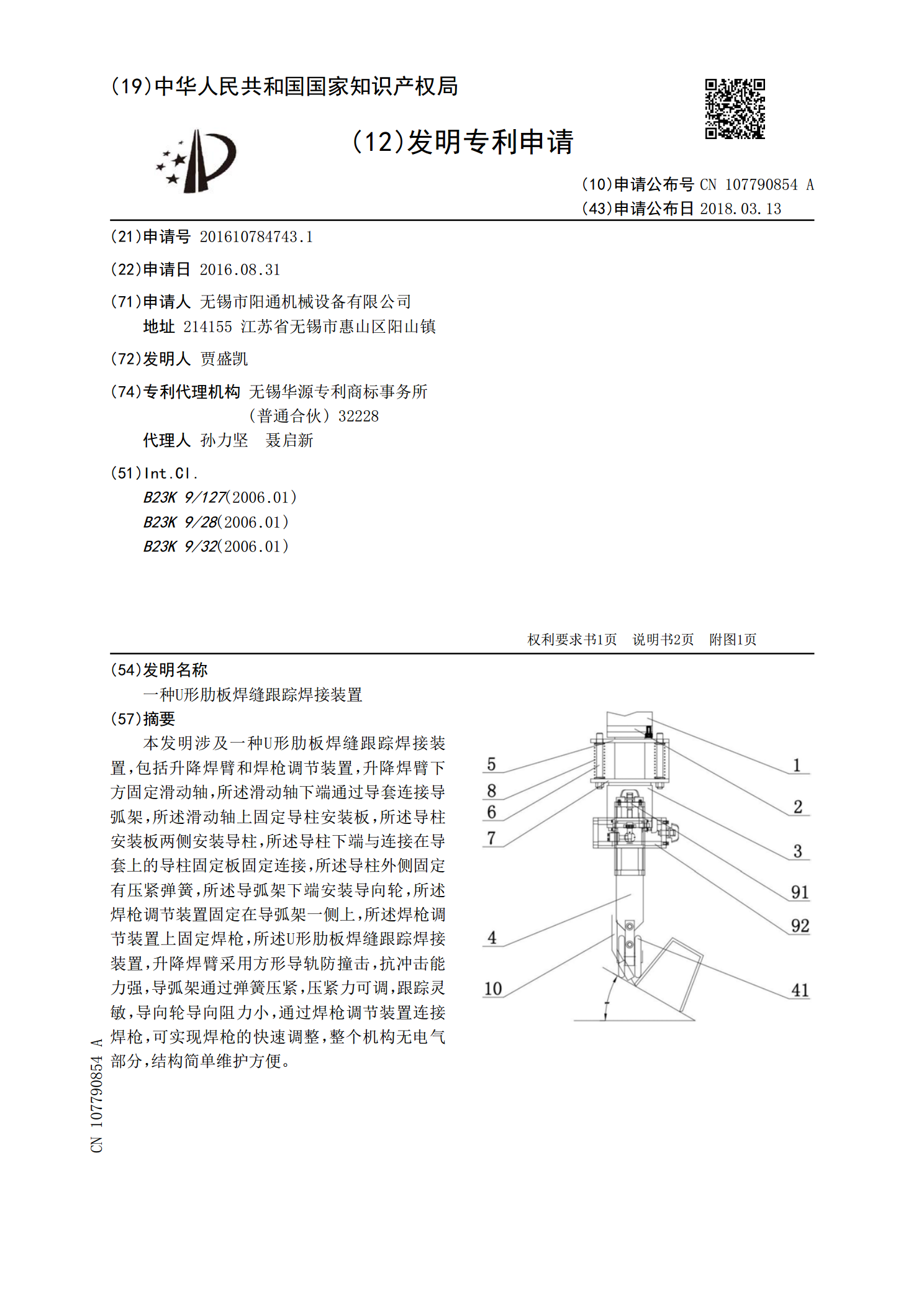
本发明涉及一种U形肋板焊缝跟踪焊接装置,包括升降焊臂和焊枪调节装置,升降焊臂下方固定滑动轴,所述滑动轴下端通过导套连接导弧架,所述滑动轴上固定导柱安装板,所述导柱安装板两侧安装导柱,所述导柱下端与连接在导套上的导柱固定板固定连接,所述导柱外侧固定有压紧弹簧,所述导弧架下端安装导向轮,所述焊枪调节装置固定在导弧架一侧上,所述焊枪调节装置上固定焊枪,所述U形肋板焊缝跟踪焊接装置,升降焊臂采用方形导轨防撞击,抗冲击能力强,导弧架通过弹簧压紧,压紧力可调,跟踪灵敏,导向轮导向阻力小,通过焊枪调节装置连接焊枪,可实

角焊缝机械跟踪自动焊接装置.pdf
一种角焊缝机械跟踪自动焊接装置,包括焊枪、伸缩套、导向套、旋转轴和支撑座。焊枪通过焊枪夹持块平行固定在伸缩套一侧,伸缩套下端设有导向轮,伸缩套与导向套滑动配合,伸缩套内同轴固定有伸缩杆,伸缩杆滑动伸入在导向套中,导向套上端设有弹簧挡,伸缩杆顶部与弹簧挡之间设有压缩弹簧,从而使焊枪随伸缩套一起相对于导向套轴向移动。旋转轴通过轴承组件安装在支撑座内,支撑座的一侧同轴安装有弹簧套筒,旋转轴伸入弹簧套筒内的一段套装有控制其转动的扭转弹簧,旋转轴伸出支撑座的另一侧设有夹持头,夹持头与导向套上部夹持配合,从而使焊枪随