
一种7自由度仿生人形机械臂.pdf

Ke****67

1/9
2/9
3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种7自由度仿生人形机械臂.pdf
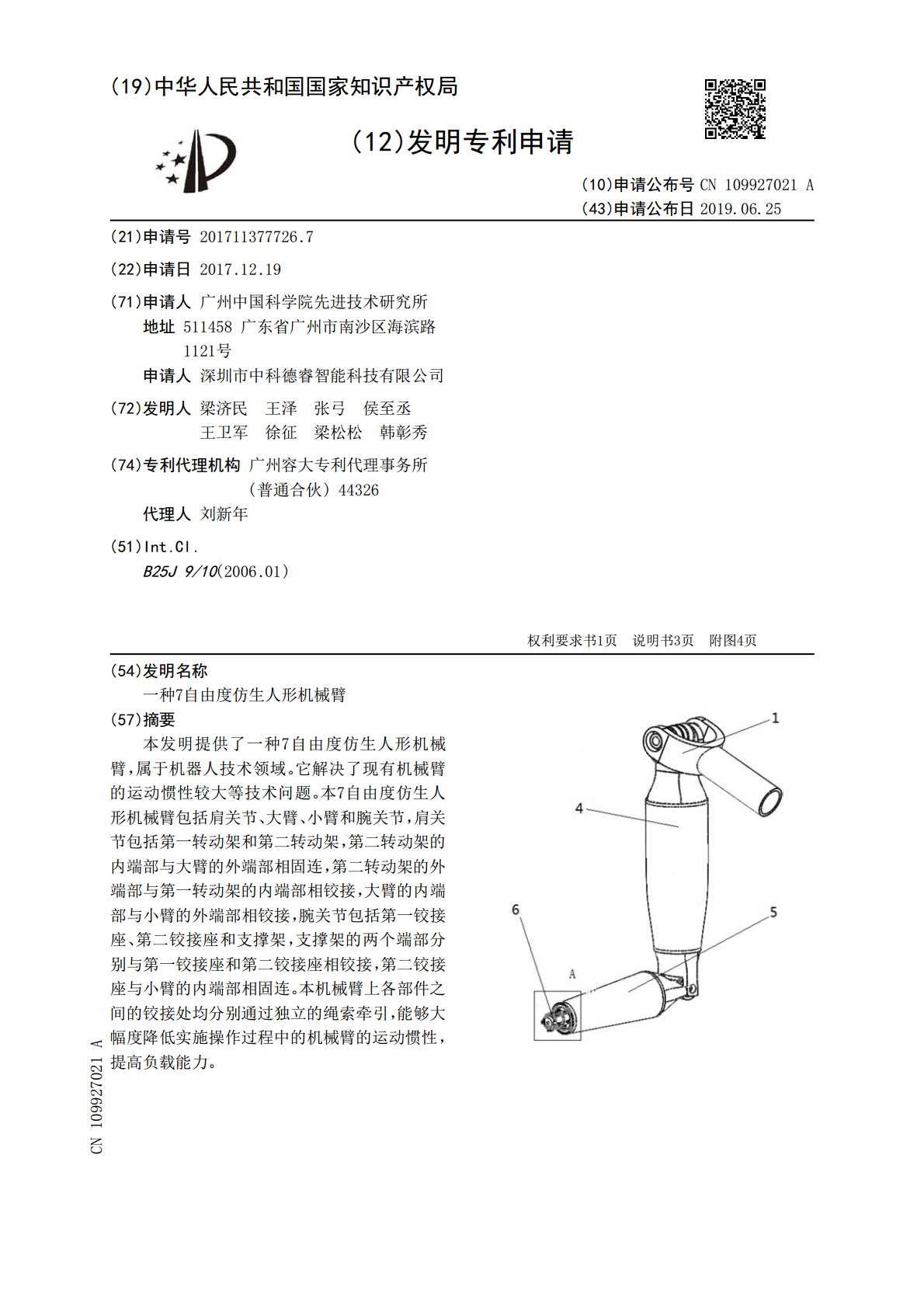
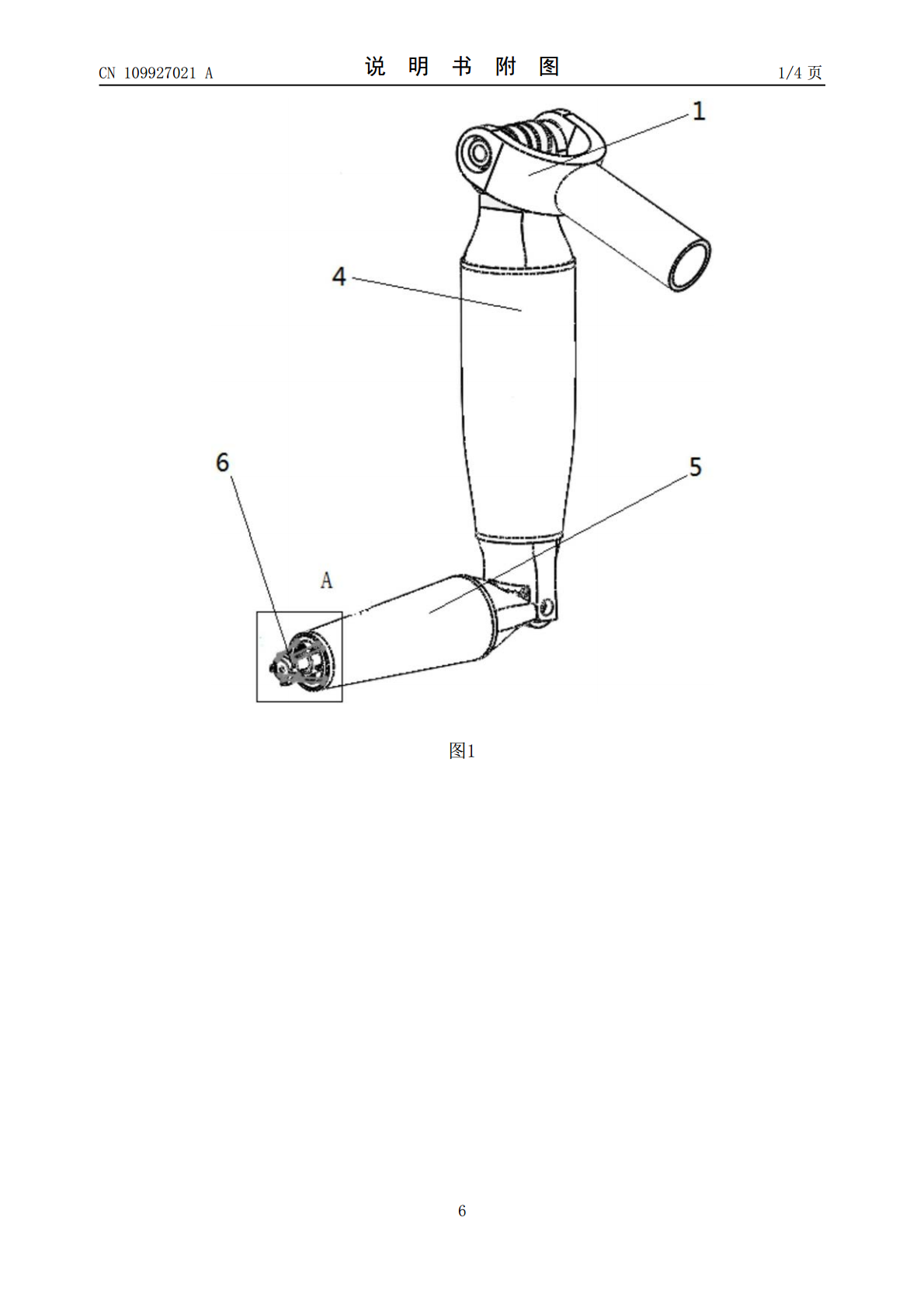
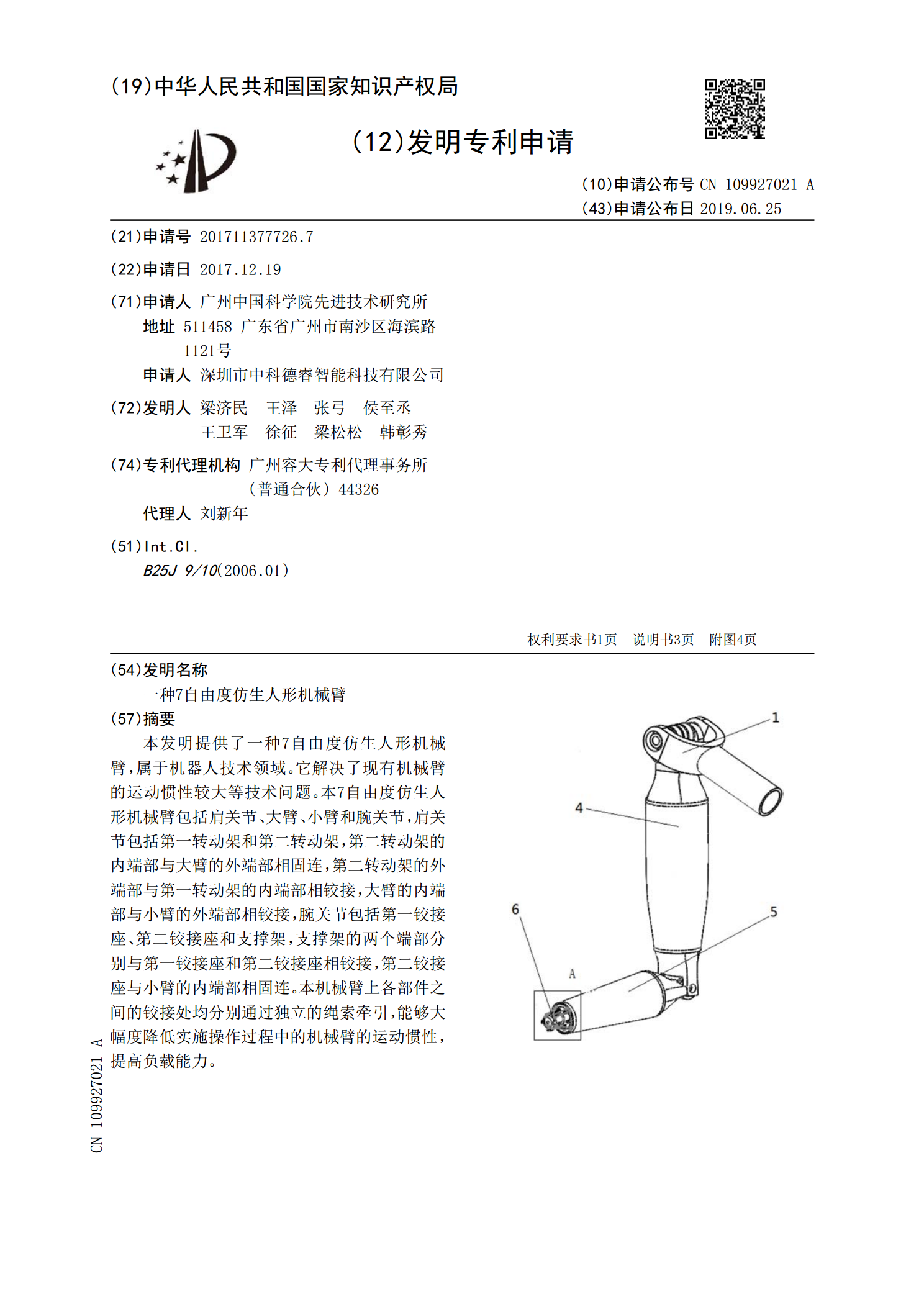
本发明提供了一种7自由度仿生人形机械臂,属于机器人技术领域。它解决了现有机械臂的运动惯性较大等技术问题。本7自由度仿生人形机械臂包括肩关节、大臂、小臂和腕关节,肩关节包括第一转动架和第二转动架,第二转动架的内端部与大臂的外端部相固连,第二转动架的外端部与第一转动架的内端部相铰接,大臂的内端部与小臂的外端部相铰接,腕关节包括第一铰接座、第二铰接座和支撑架,支撑架的两个端部分别与第一铰接座和第二铰接座相铰接,第二铰接座与小臂的内端部相固连。本机械臂上各部件之间的铰接处均分别通过独立的绳索牵引,能够大幅度降低实

7自由度类肌腱驱动仿生机械臂的设计研究.docx
7自由度类肌腱驱动仿生机械臂的设计研究1.内容概览本论文深入研究了七自由度类肌腱驱动仿生机械臂的设计与实现,旨在通过模仿生物肌肉和肌腱的工作原理,设计出一种具有高度仿生性和高效能的机械臂,以满足当前机器人技术领域的应用需求。在论文的开篇部分,首先介绍了仿生机械臂的重要性及其在工业、医疗、军事等领域的广泛应用前景。论文详细阐述了研究的背景、目的和意义,以及所采用的研究方法和技术路线。论文对七自由度类肌腱驱动仿生机械臂进行了系统的结构设计。通过对生物肌肉和肌腱的深入分析,结合仿生学原理,提出了机械臂各自由度的
一种机械臂关节及六自由度机械臂.pdf
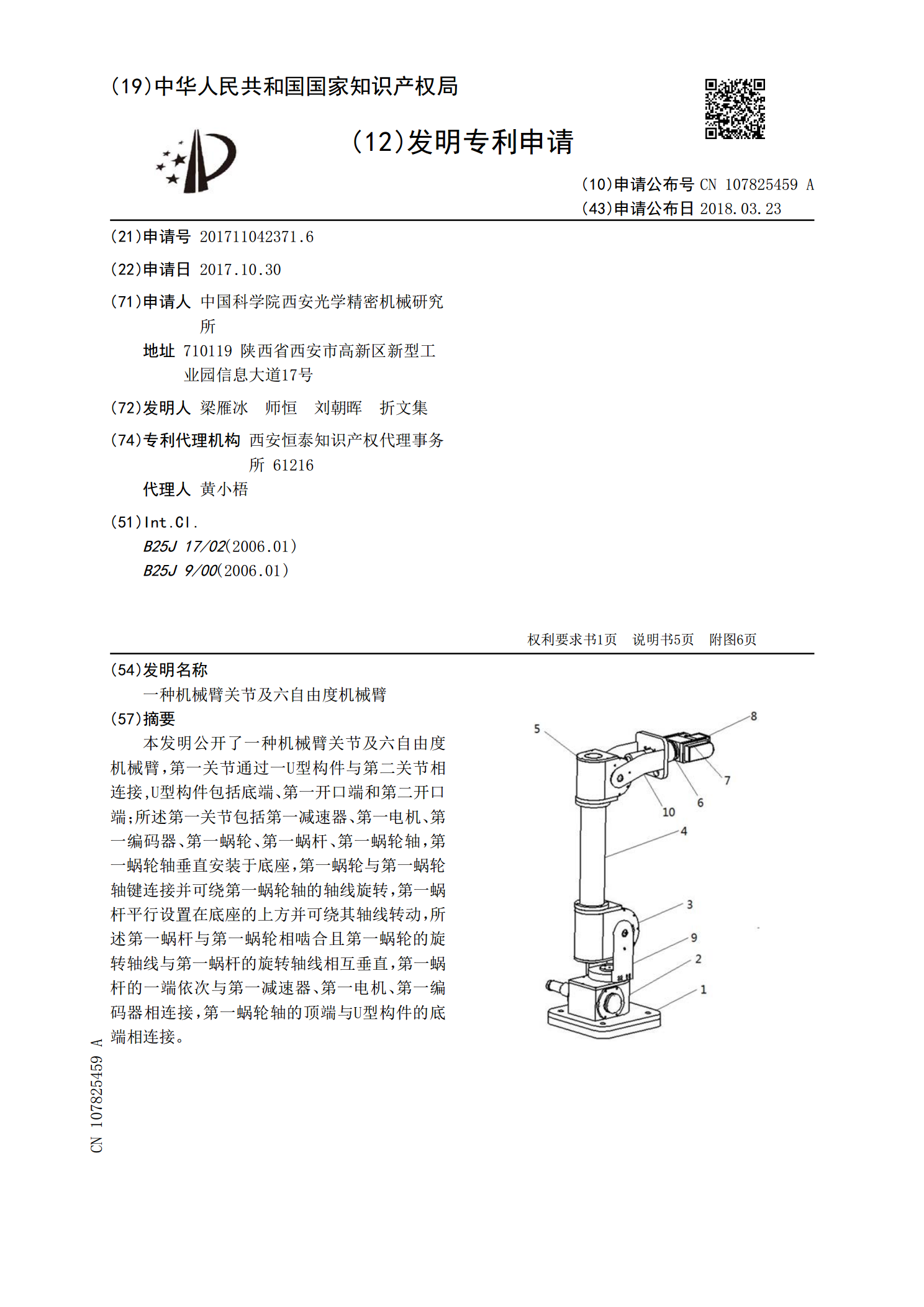
本发明公开了一种机械臂关节及六自由度机械臂,第一关节通过一U型构件与第二关节相连接,U型构件包括底端、第一开口端和第二开口端;所述第一关节包括第一减速器、第一电机、第一编码器、第一蜗轮、第一蜗杆、第一蜗轮轴,第一蜗轮轴垂直安装于底座,第一蜗轮与第一蜗轮轴键连接并可绕第一蜗轮轴的轴线旋转,第一蜗杆平行设置在底座的上方并可绕其轴线转动,所述第一蜗杆与第一蜗轮相啮合且第一蜗轮的旋转轴线与第一蜗杆的旋转轴线相互垂直,第一蜗杆的一端依次与第一减速器、第一电机、第一编码器相连接,第一蜗轮轴的顶端与U型构件的底端相连接
基于改进柔索传动的七自由度拟人形机械臂.pdf
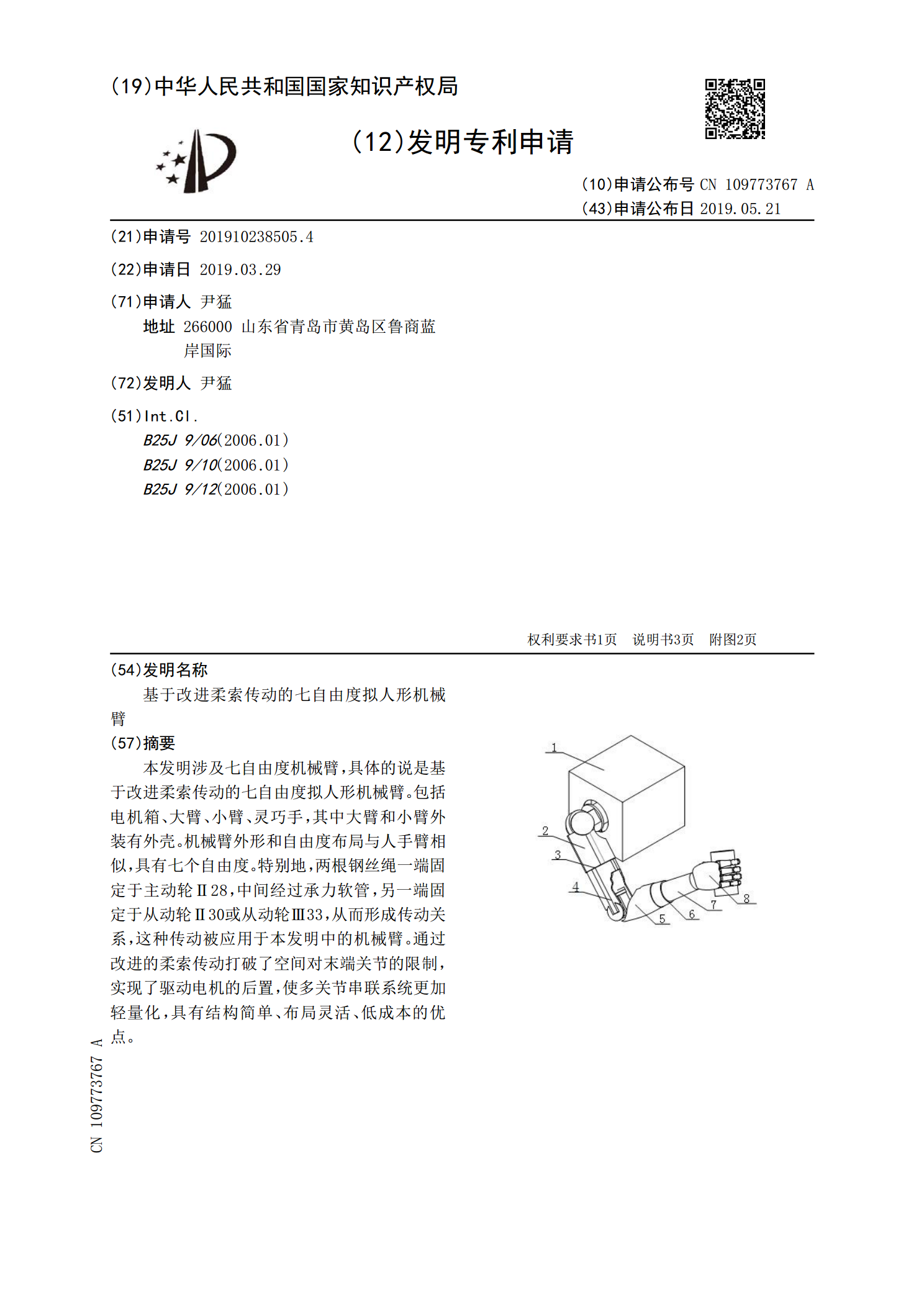
本发明涉及七自由度机械臂,具体的说是基于改进柔索传动的七自由度拟人形机械臂。包括电机箱、大臂、小臂、灵巧手,其中大臂和小臂外装有外壳。机械臂外形和自由度布局与人手臂相似,具有七个自由度。特别地,两根钢丝绳一端固定于主动轮Ⅱ28,中间经过承力软管,另一端固定于从动轮Ⅱ30或从动轮Ⅲ33,从而形成传动关系,这种传动被应用于本发明中的机械臂。通过改进的柔索传动打破了空间对末端关节的限制,实现了驱动电机的后置,使多关节串联系统更加轻量化,具有结构简单、布局灵活、低成本的优点。

气动肌肉驱动7自由度仿生机械臂的类人运动控制研究的开题报告.docx
气动肌肉驱动7自由度仿生机械臂的类人运动控制研究的开题报告本文将围绕气动肌肉驱动7自由度仿生机械臂的类人运动控制研究展开,论述气动肌肉的概念、仿生机械臂的特点、类人运动控制的技术路线以及针对该机械臂的具体运动控制方法等方面进行细致的探讨。1.研究目的机械臂作为一种重要的工业自动化技术,在各个领域应用广泛。仿生机械臂是以自然界生物结构为模板,仿照其生物机理和运动方式,最终实现机械臂的优化设计和控制。气动肌肉驱动仿生机械臂则是一种新型的机械臂结构,其特殊的材料和驱动方式使其表现出类人的动态特性,具有更高的运动