
基于改进柔索传动的七自由度拟人形机械臂.pdf

念珊****写意


1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于改进柔索传动的七自由度拟人形机械臂.pdf
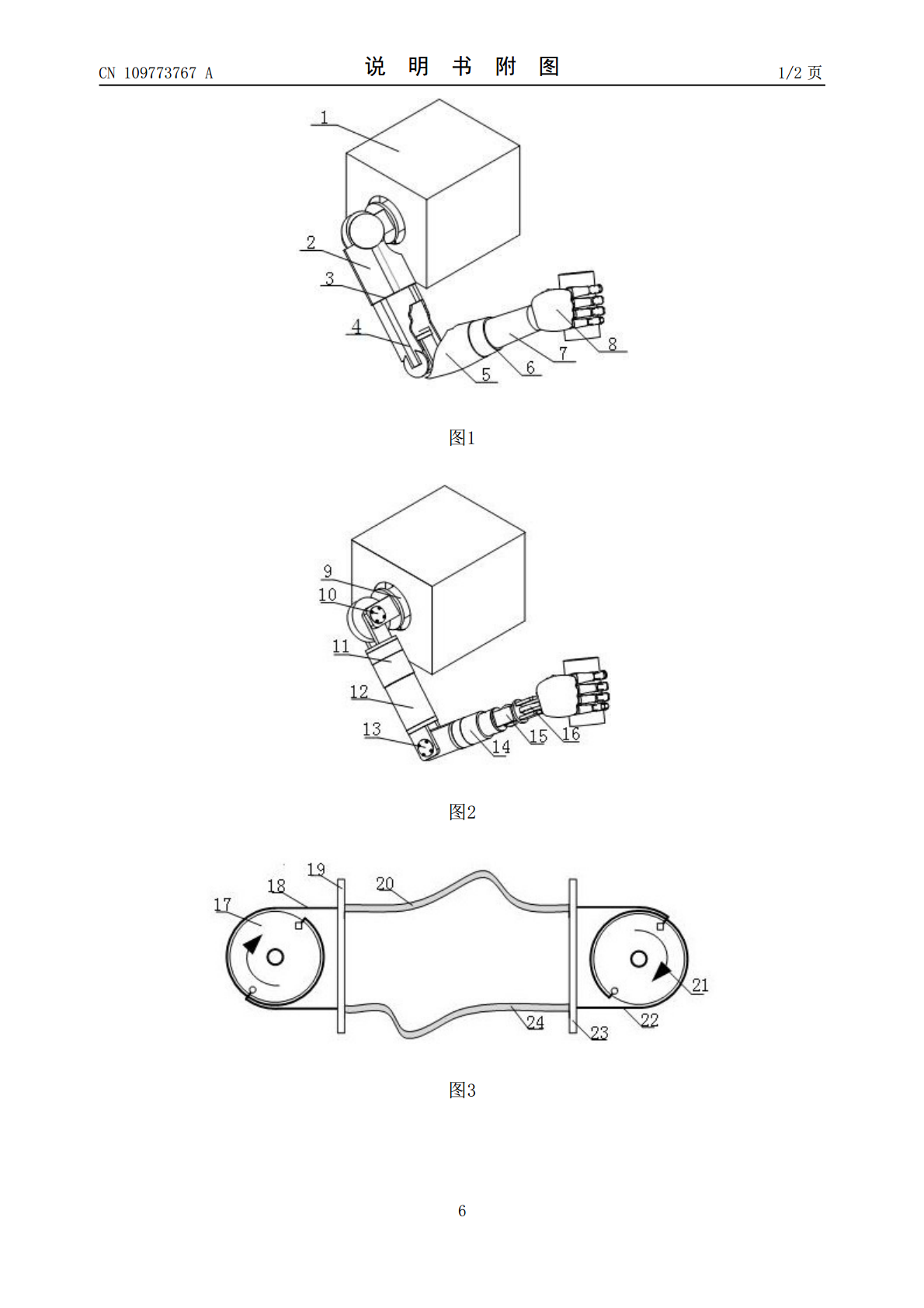
本发明涉及七自由度机械臂,具体的说是基于改进柔索传动的七自由度拟人形机械臂。包括电机箱、大臂、小臂、灵巧手,其中大臂和小臂外装有外壳。机械臂外形和自由度布局与人手臂相似,具有七个自由度。特别地,两根钢丝绳一端固定于主动轮Ⅱ28,中间经过承力软管,另一端固定于从动轮Ⅱ30或从动轮Ⅲ33,从而形成传动关系,这种传动被应用于本发明中的机械臂。通过改进的柔索传动打破了空间对末端关节的限制,实现了驱动电机的后置,使多关节串联系统更加轻量化,具有结构简单、布局灵活、低成本的优点。
基于差动绳传动的两自由度共线机械臂关节.pdf
本发明提供了一种基于差动绳传动的两自由度共线机械臂关节,包括设置于第一机械臂筒段内的驱动装置和两个小导轮,分别活动设置于俯仰轴两端的两个大导轮,所述俯仰轴的两端与所述第一机械臂筒段活动连接,偏航轴通过套接杆与所述俯仰轴成正交套接连接,分别活动设置于所述偏航轴的两端的偏航上盘和偏航下盘,所述偏航轴的两端与第二机械臂筒段活动连接,所述偏航上盘与所述第二机械臂筒段固定连接,第一或第二驱动绳索从驱动装置中分两端伸出,所述第一驱动绳索的每一端通过所述俯仰轴一端的同一个小导轮、同一个大导轮导向缠绕并固定在所述偏航上盘

基于改进蚁群算法的六自由度机械臂路径规划.docx
基于改进蚁群算法的六自由度机械臂路径规划基于改进蚁群算法的六自由度机械臂路径规划摘要:机器人在工业自动化领域中得到越来越广泛的应用,而机械臂作为机器人的重要组成部分,路径规划是机械臂控制中的关键问题之一。本文基于改进蚁群算法,提出了一种六自由度机械臂的路径规划方法。首先,介绍了蚁群算法在路径规划中的基本原理和应用。然后,针对六自由度机械臂的特点,设计了相应的状态转移规则和路径评估函数,并结合蚁群算法进行路径搜索和优化。实验结果表明,该方法在六自由度机械臂路径规划中具有较好的性能和效果,能够有效降低机械臂的
一种7自由度仿生人形机械臂.pdf
本发明提供了一种7自由度仿生人形机械臂,属于机器人技术领域。它解决了现有机械臂的运动惯性较大等技术问题。本7自由度仿生人形机械臂包括肩关节、大臂、小臂和腕关节,肩关节包括第一转动架和第二转动架,第二转动架的内端部与大臂的外端部相固连,第二转动架的外端部与第一转动架的内端部相铰接,大臂的内端部与小臂的外端部相铰接,腕关节包括第一铰接座、第二铰接座和支撑架,支撑架的两个端部分别与第一铰接座和第二铰接座相铰接,第二铰接座与小臂的内端部相固连。本机械臂上各部件之间的铰接处均分别通过独立的绳索牵引,能够大幅度降低实

基于改进遗传算法的六自由度机械臂轨迹优化方法.pdf
本发明涉及一种基于改进遗传算法的六自由度机械臂轨迹优化方法,包括:步骤S1:获得六自由度机械臂末端执行器起始点和目标点位姿;步骤S2:在起始点与目标点之间,通过路径规划得到机械臂各个关节的路径点;步骤S3:采用三次样条插值算法在机械臂每个关节的相邻两个路径点间构建运动轨迹,获取轨迹曲线多项式;步骤S4:基于轨迹曲线多项式,构建关节的子目标函数;步骤S5:基于改进遗传算法对机械臂关节轨迹进行优化;步骤S6:对得到的每一段曲线轨迹,在所有关节的最优个体中选择最长时间作为该段轨迹的最佳时间;步骤S7:基于轨迹的