
7自由度类肌腱驱动仿生机械臂的设计研究.docx

12****sf


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

7自由度类肌腱驱动仿生机械臂的设计研究.docx
7自由度类肌腱驱动仿生机械臂的设计研究1.内容概览本论文深入研究了七自由度类肌腱驱动仿生机械臂的设计与实现,旨在通过模仿生物肌肉和肌腱的工作原理,设计出一种具有高度仿生性和高效能的机械臂,以满足当前机器人技术领域的应用需求。在论文的开篇部分,首先介绍了仿生机械臂的重要性及其在工业、医疗、军事等领域的广泛应用前景。论文详细阐述了研究的背景、目的和意义,以及所采用的研究方法和技术路线。论文对七自由度类肌腱驱动仿生机械臂进行了系统的结构设计。通过对生物肌肉和肌腱的深入分析,结合仿生学原理,提出了机械臂各自由度的

气动肌肉驱动7自由度仿生机械臂的类人运动控制研究的开题报告.docx
气动肌肉驱动7自由度仿生机械臂的类人运动控制研究的开题报告本文将围绕气动肌肉驱动7自由度仿生机械臂的类人运动控制研究展开,论述气动肌肉的概念、仿生机械臂的特点、类人运动控制的技术路线以及针对该机械臂的具体运动控制方法等方面进行细致的探讨。1.研究目的机械臂作为一种重要的工业自动化技术,在各个领域应用广泛。仿生机械臂是以自然界生物结构为模板,仿照其生物机理和运动方式,最终实现机械臂的优化设计和控制。气动肌肉驱动仿生机械臂则是一种新型的机械臂结构,其特殊的材料和驱动方式使其表现出类人的动态特性,具有更高的运动

线驱动仿生机械臂设计及控制策略研究的开题报告.docx
线驱动仿生机械臂设计及控制策略研究的开题报告一、题目线驱动仿生机械臂设计及控制策略研究二、研究背景目前,机器人技术已经广泛应用于各个领域,如工业制造、医疗保健、航空航天、探地勘测等。而机械臂作为机器人的重要组成部分之一,已经被广泛使用。与传统机械臂相比,仿生机械臂更贴近人体肢体结构,并具有更好的灵活性和适应性。因此,仿生机械臂也受到了越来越多的关注。仿生机械臂的驱动方式有很多种,如液压驱动、气压驱动、电驱动等。而线驱动作为一种新型的驱动方式,具有结构简单、减少能量消耗、动态响应快等优点,因此受到了广泛关注
一种7自由度仿生人形机械臂.pdf
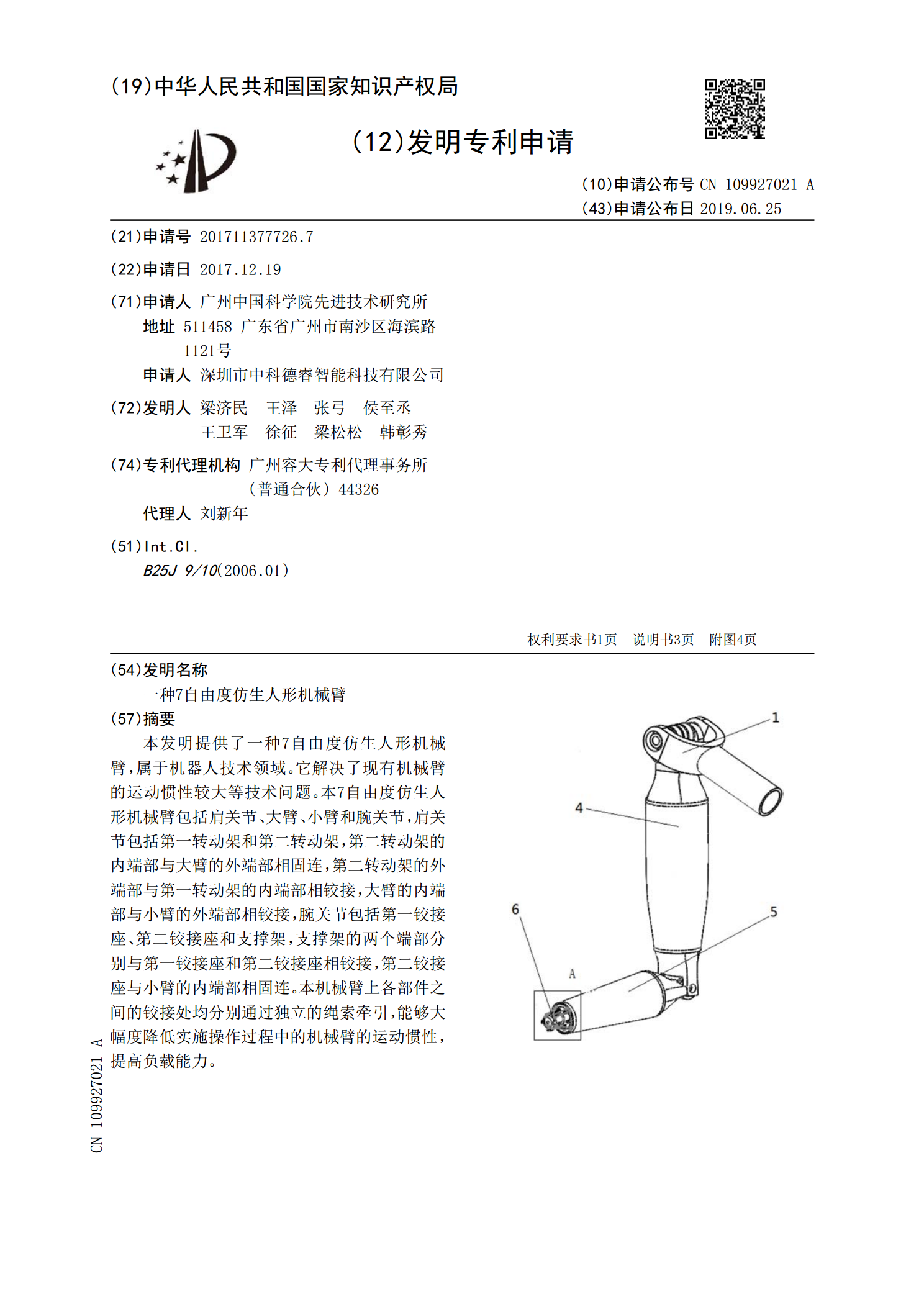
本发明提供了一种7自由度仿生人形机械臂,属于机器人技术领域。它解决了现有机械臂的运动惯性较大等技术问题。本7自由度仿生人形机械臂包括肩关节、大臂、小臂和腕关节,肩关节包括第一转动架和第二转动架,第二转动架的内端部与大臂的外端部相固连,第二转动架的外端部与第一转动架的内端部相铰接,大臂的内端部与小臂的外端部相铰接,腕关节包括第一铰接座、第二铰接座和支撑架,支撑架的两个端部分别与第一铰接座和第二铰接座相铰接,第二铰接座与小臂的内端部相固连。本机械臂上各部件之间的铰接处均分别通过独立的绳索牵引,能够大幅度降低实

多自由度欠驱动仿生机械手机构与造型设计.doc
多自由度欠驱动仿生机械手机构与造型设计由于战争、交通事故等原因,全世界的断臂、断手患者的数量日益增加,因此对假肢、假手的需求也不断的扩大。同时,在工业生产的特殊环境中,对复杂形状的物体进行自适应抓取,也需要这样的仿生机械手。但目前市场上接近真手功能的假手通常是机电结合的高科技产品,不但价格昂贵且维护费用高,不能满足广大患者的需要;而且由于人手的自由度多导致的驱动控制系统复杂的问题现在一直也没能得到很好解决。因此研究开发具有一般人手功能、便于维护而又成本较低的假手一直是研究者和工程师们的不懈追求。基于上述思