
一种主动式磁控胶囊机器人检测系统及检测方法.pdf

淑然****by

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种主动式磁控胶囊机器人检测系统及检测方法.pdf
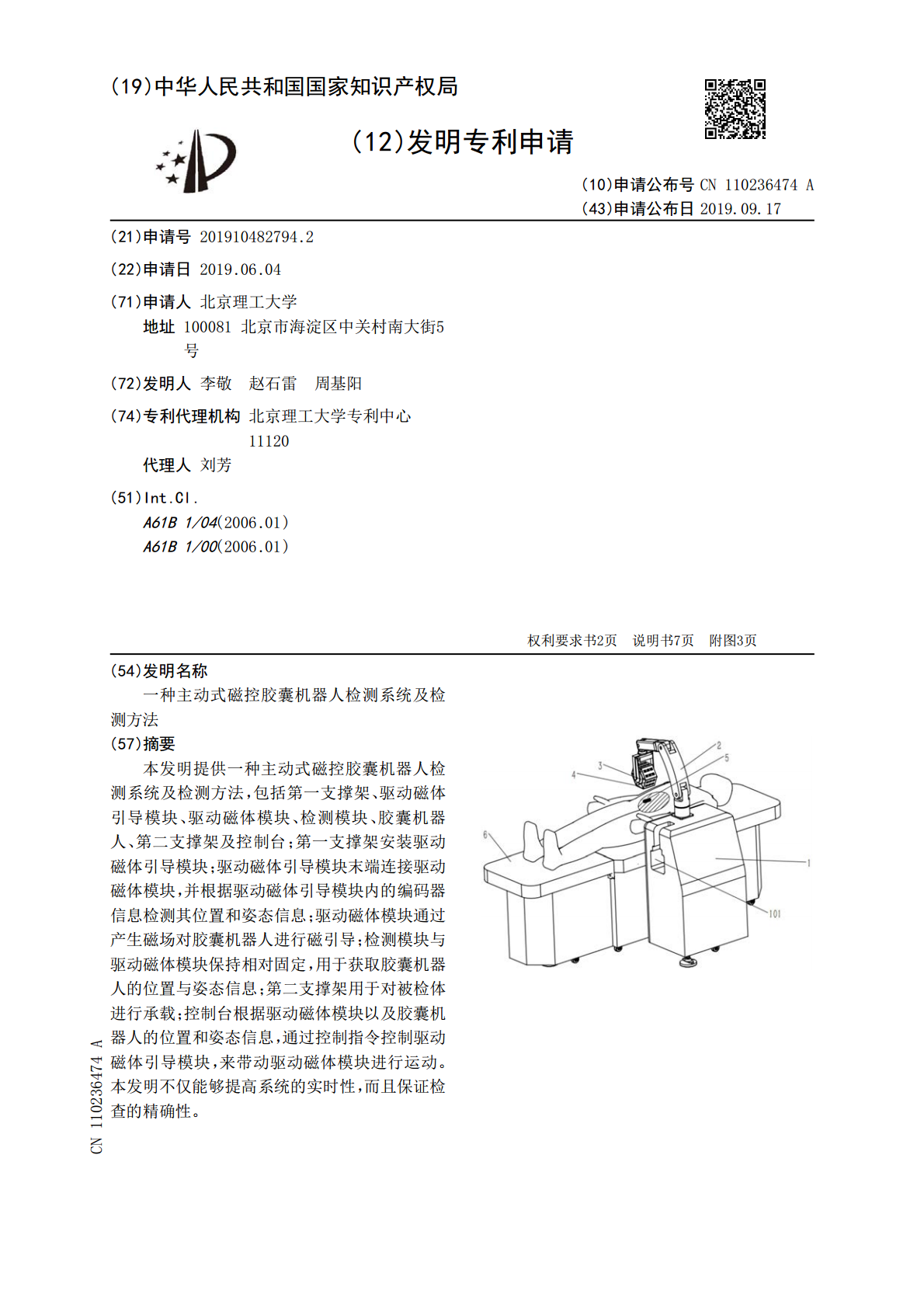
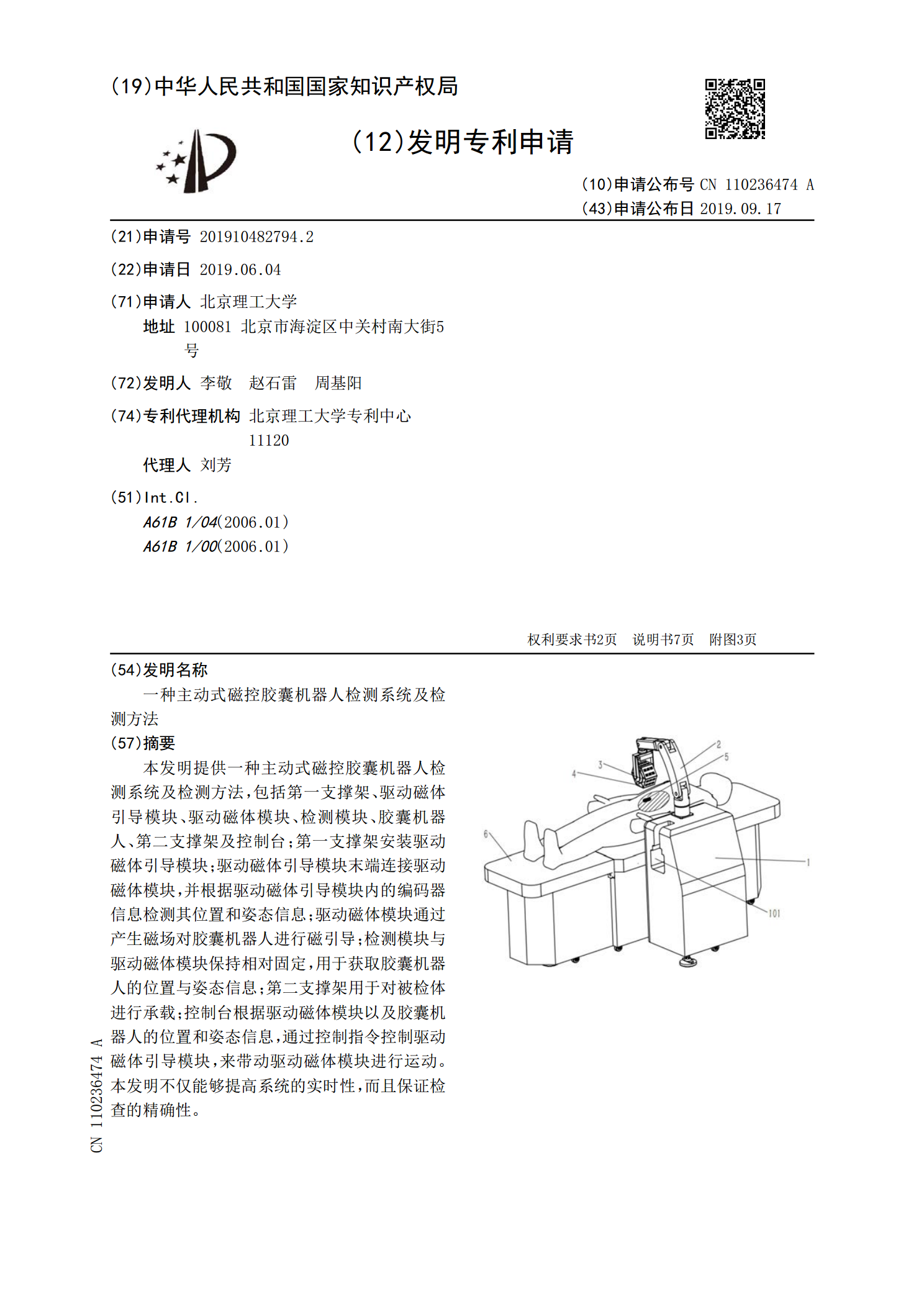
本发明提供一种主动式磁控胶囊机器人检测系统及检测方法,包括第一支撑架、驱动磁体引导模块、驱动磁体模块、检测模块、胶囊机器人、第二支撑架及控制台;第一支撑架安装驱动磁体引导模块;驱动磁体引导模块末端连接驱动磁体模块,并根据驱动磁体引导模块内的编码器信息检测其位置和姿态信息;驱动磁体模块通过产生磁场对胶囊机器人进行磁引导;检测模块与驱动磁体模块保持相对固定,用于获取胶囊机器人的位置与姿态信息;第二支撑架用于对被检体进行承载;控制台根据驱动磁体模块以及胶囊机器人的位置和姿态信息,通过控制指令控制驱动磁体引导模块

一种磁悬浮胶囊机器人的磁控系统.pdf
本发明公开了一种磁悬浮胶囊机器人的磁控系统,该磁控系统用于控制磁悬浮胶囊机器人进行五自由度运动,其包括主控制器、磁控线圈系统和磁悬浮系统;主控制器被构造成用于发出控制信号;磁控线圈系统用于控制磁悬浮胶囊机器人的转动运动;磁悬浮系统用于实现胶囊机器人的线性运动。该磁控系统可以对磁悬浮胶囊机器人进行五自由度运动控制,具有检测全面,漏检率低,无滞留风险等优点。
一种磁控式抗干扰靶向施药胶囊机器人.pdf
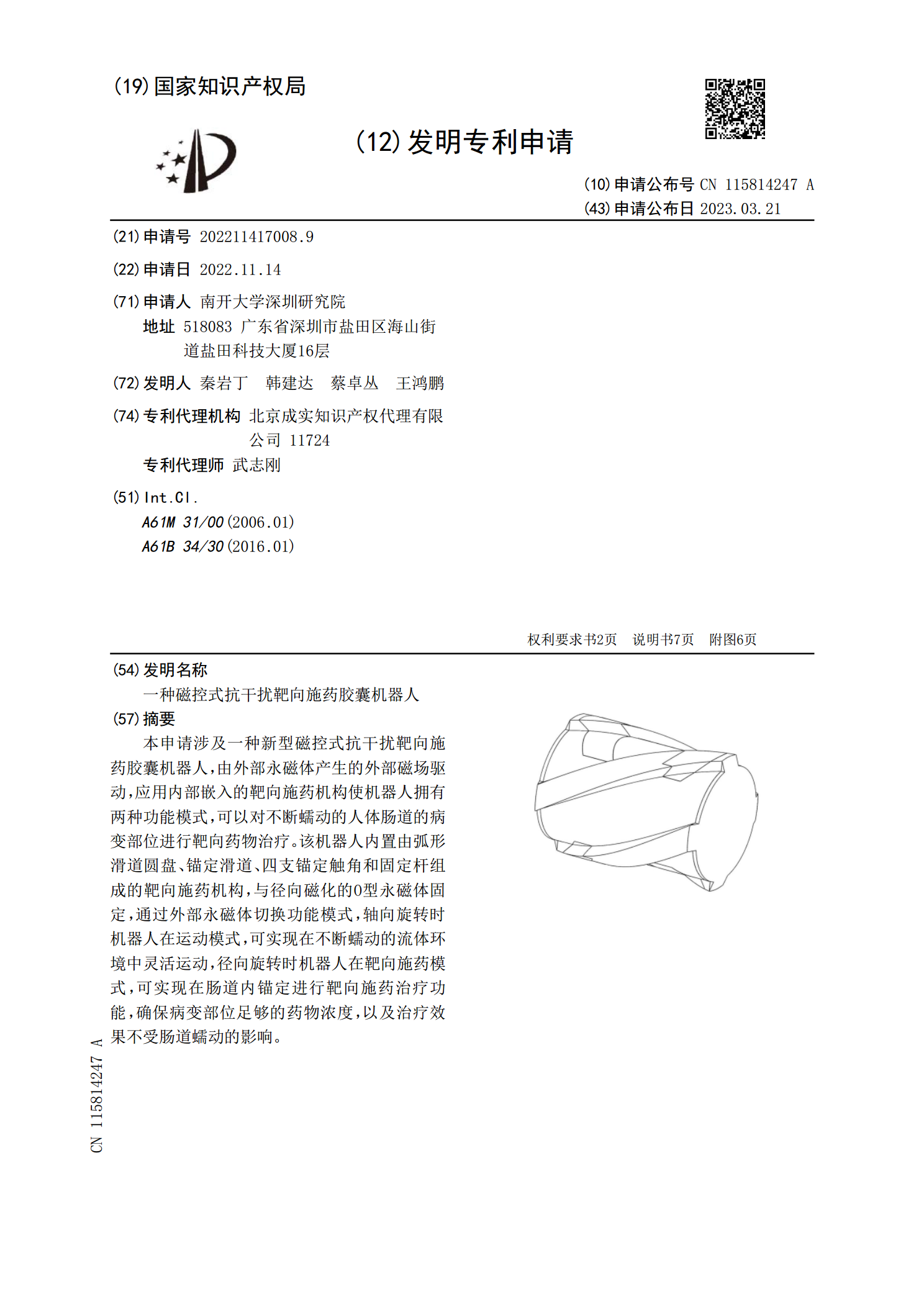
本申请涉及一种新型磁控式抗干扰靶向施药胶囊机器人,由外部永磁体产生的外部磁场驱动,应用内部嵌入的靶向施药机构使机器人拥有两种功能模式,可以对不断蠕动的人体肠道的病变部位进行靶向药物治疗。该机器人内置由弧形滑道圆盘、锚定滑道、四支锚定触角和固定杆组成的靶向施药机构,与径向磁化的O型永磁体固定,通过外部永磁体切换功能模式,轴向旋转时机器人在运动模式,可实现在不断蠕动的流体环境中灵活运动,径向旋转时机器人在靶向施药模式,可实现在肠道内锚定进行靶向施药治疗功能,确保病变部位足够的药物浓度,以及治疗效果不受肠道蠕动
一种磁控胶囊机器人的外部控制装置.pdf
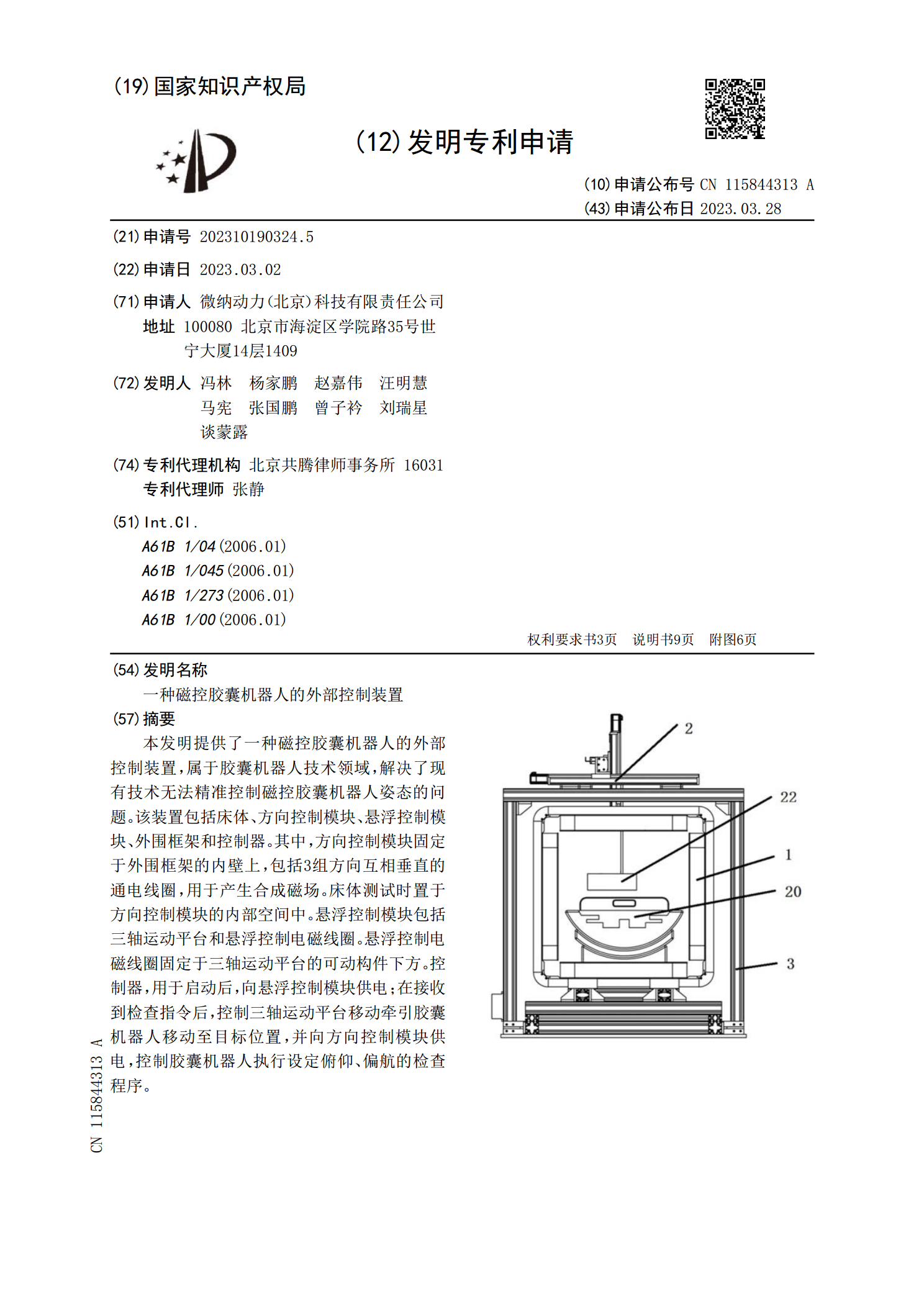
本发明提供了一种磁控胶囊机器人的外部控制装置,属于胶囊机器人技术领域,解决了现有技术无法精准控制磁控胶囊机器人姿态的问题。该装置包括床体、方向控制模块、悬浮控制模块、外围框架和控制器。其中,方向控制模块固定于外围框架的内壁上,包括3组方向互相垂直的通电线圈,用于产生合成磁场。床体测试时置于方向控制模块的内部空间中。悬浮控制模块包括三轴运动平台和悬浮控制电磁线圈。悬浮控制电磁线圈固定于三轴运动平台的可动构件下方。控制器,用于启动后,向悬浮控制模块供电;在接收到检查指令后,控制三轴运动平台移动牵引胶囊机器人移

一种微流控细胞磁捕获与检测系统及其捕获与检测方法.pdf
本发明公开一种微流控细胞磁捕获与检测系统及其捕获与检测方法。将抗趋化因子受体CXCR4的抗体(12G5)、荧光分子AlexaFluor647(F647)修饰在磁性四氧化三铁纳米颗粒表面,构建磁性荧光纳米探针,并结合微流控芯片分选与磁捕获,以及荧光定量分析仪进行急性髓系白血病耐药细胞的检测。磁性荧光纳米探针能特异性靶向急性髓系白血病耐药细胞。将细胞与纳米探针共孵育后,以一恒速通过所述微流控芯片,在微流控芯片一端的细胞捕获区外加静磁场,被磁标记的细胞由于受到磁力作用滞留在微流控芯片的细胞捕获区内,而未被磁