
一种磁悬浮胶囊机器人的磁控系统.pdf

一只****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种磁悬浮胶囊机器人的磁控系统.pdf
本发明公开了一种磁悬浮胶囊机器人的磁控系统,该磁控系统用于控制磁悬浮胶囊机器人进行五自由度运动,其包括主控制器、磁控线圈系统和磁悬浮系统;主控制器被构造成用于发出控制信号;磁控线圈系统用于控制磁悬浮胶囊机器人的转动运动;磁悬浮系统用于实现胶囊机器人的线性运动。该磁控系统可以对磁悬浮胶囊机器人进行五自由度运动控制,具有检测全面,漏检率低,无滞留风险等优点。
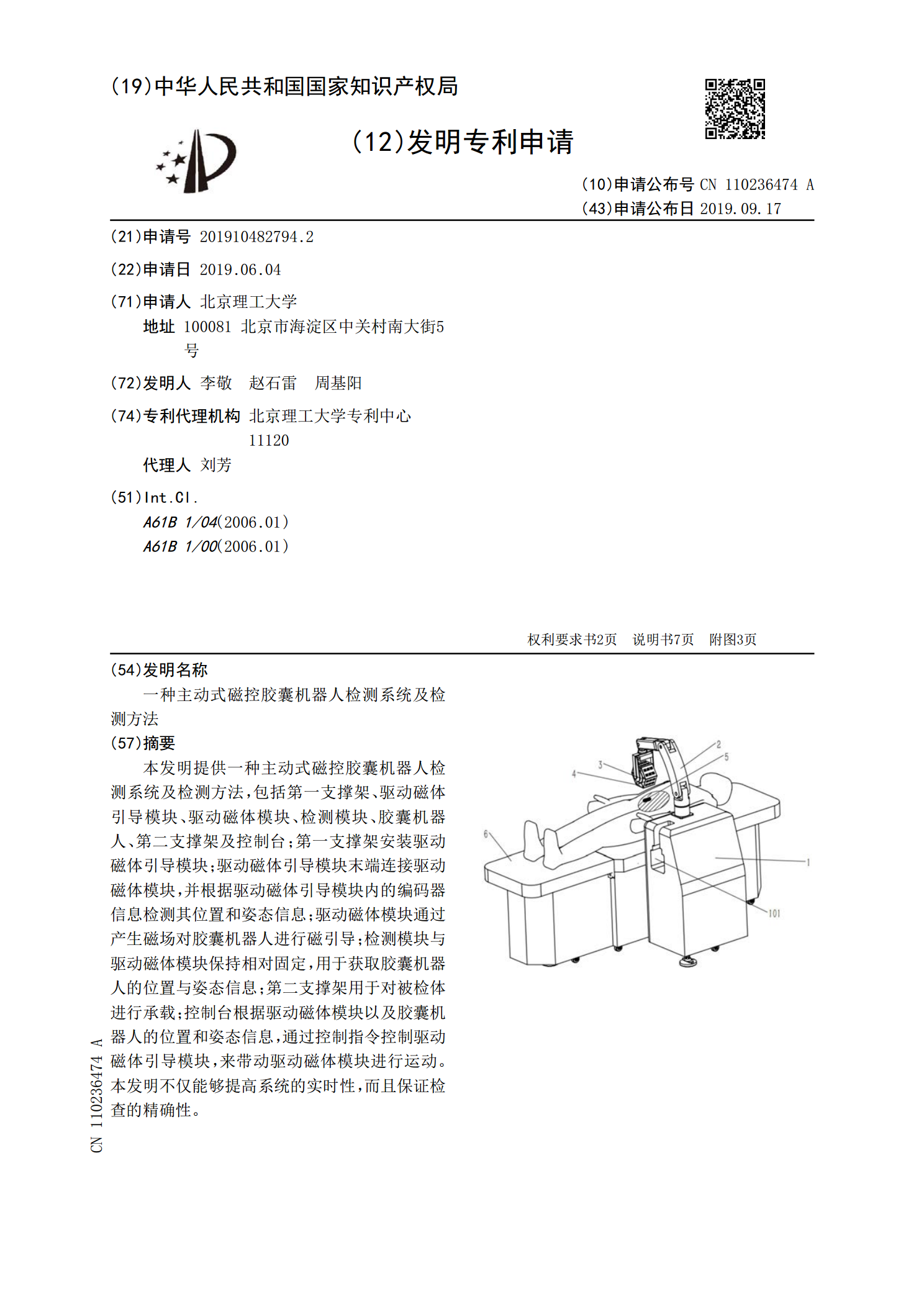
一种主动式磁控胶囊机器人检测系统及检测方法.pdf
本发明提供一种主动式磁控胶囊机器人检测系统及检测方法,包括第一支撑架、驱动磁体引导模块、驱动磁体模块、检测模块、胶囊机器人、第二支撑架及控制台;第一支撑架安装驱动磁体引导模块;驱动磁体引导模块末端连接驱动磁体模块,并根据驱动磁体引导模块内的编码器信息检测其位置和姿态信息;驱动磁体模块通过产生磁场对胶囊机器人进行磁引导;检测模块与驱动磁体模块保持相对固定,用于获取胶囊机器人的位置与姿态信息;第二支撑架用于对被检体进行承载;控制台根据驱动磁体模块以及胶囊机器人的位置和姿态信息,通过控制指令控制驱动磁体引导模块
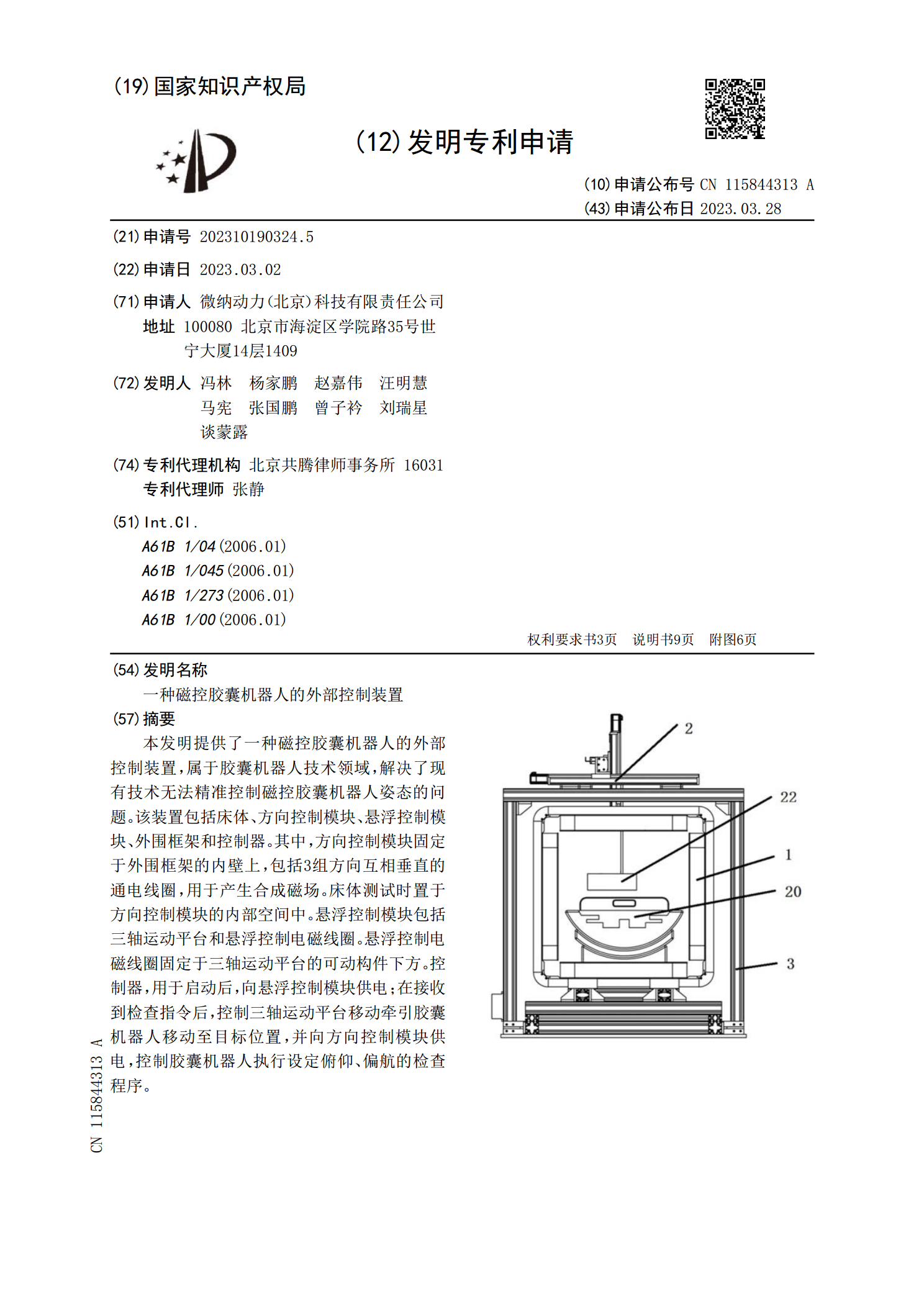
一种磁控胶囊机器人的外部控制装置.pdf
本发明提供了一种磁控胶囊机器人的外部控制装置,属于胶囊机器人技术领域,解决了现有技术无法精准控制磁控胶囊机器人姿态的问题。该装置包括床体、方向控制模块、悬浮控制模块、外围框架和控制器。其中,方向控制模块固定于外围框架的内壁上,包括3组方向互相垂直的通电线圈,用于产生合成磁场。床体测试时置于方向控制模块的内部空间中。悬浮控制模块包括三轴运动平台和悬浮控制电磁线圈。悬浮控制电磁线圈固定于三轴运动平台的可动构件下方。控制器,用于启动后,向悬浮控制模块供电;在接收到检查指令后,控制三轴运动平台移动牵引胶囊机器人移

一种胶囊机器人磁驱动和测量系统.pdf
一种胶囊机器人磁驱动和测量系统,包括电机蜗轮蜗杆、旋转卡盘、定位轴、承载台、管道、磁性胶囊机器人、外部永磁体、连接板、永磁体旋转电机、三轴运动平台、操作平台和霍尔传感器。电机蜗轮蜗杆和三轴运动平台均安装在操作平台上,蜗轮蜗杆、旋转卡盘与定位轴相互连接,承载台安装在操作平台上,且可自由拆卸,管道固定在承载台上,磁性胶囊机器人置于管道中;永磁体旋转电机与外部永磁体连接,永磁体旋转电机安装在连接板上,连接板固定在三轴运动平台上;霍尔传感器安装在连接板上,且外部永磁体固定在定位轴上。该系统可以驱动磁性胶囊在管道内
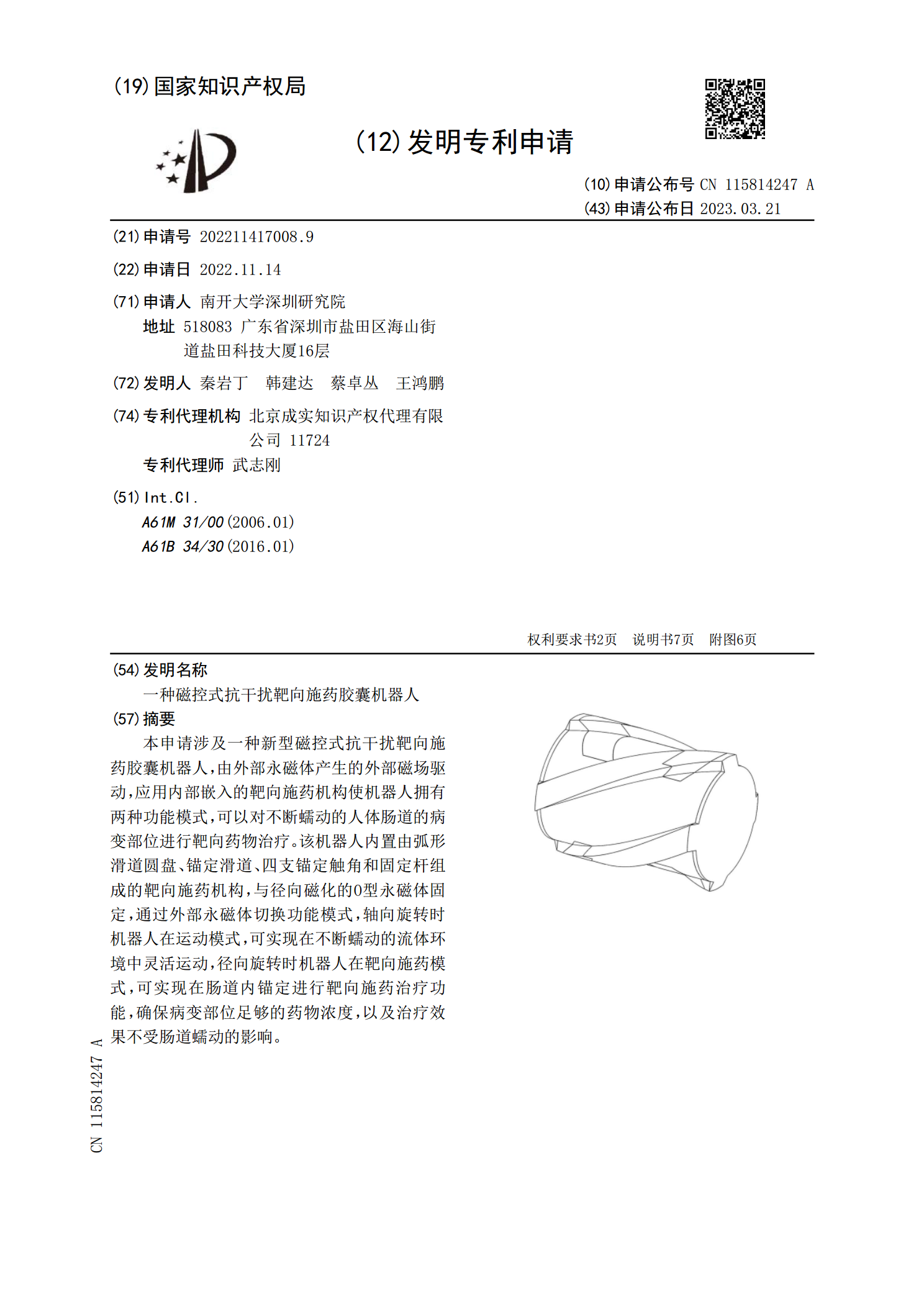
一种磁控式抗干扰靶向施药胶囊机器人.pdf
本申请涉及一种新型磁控式抗干扰靶向施药胶囊机器人,由外部永磁体产生的外部磁场驱动,应用内部嵌入的靶向施药机构使机器人拥有两种功能模式,可以对不断蠕动的人体肠道的病变部位进行靶向药物治疗。该机器人内置由弧形滑道圆盘、锚定滑道、四支锚定触角和固定杆组成的靶向施药机构,与径向磁化的O型永磁体固定,通过外部永磁体切换功能模式,轴向旋转时机器人在运动模式,可实现在不断蠕动的流体环境中灵活运动,径向旋转时机器人在靶向施药模式,可实现在肠道内锚定进行靶向施药治疗功能,确保病变部位足够的药物浓度,以及治疗效果不受肠道蠕动