
一种管道内壁巡检机器人.pdf

一只****呀淑


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种管道内壁巡检机器人.pdf
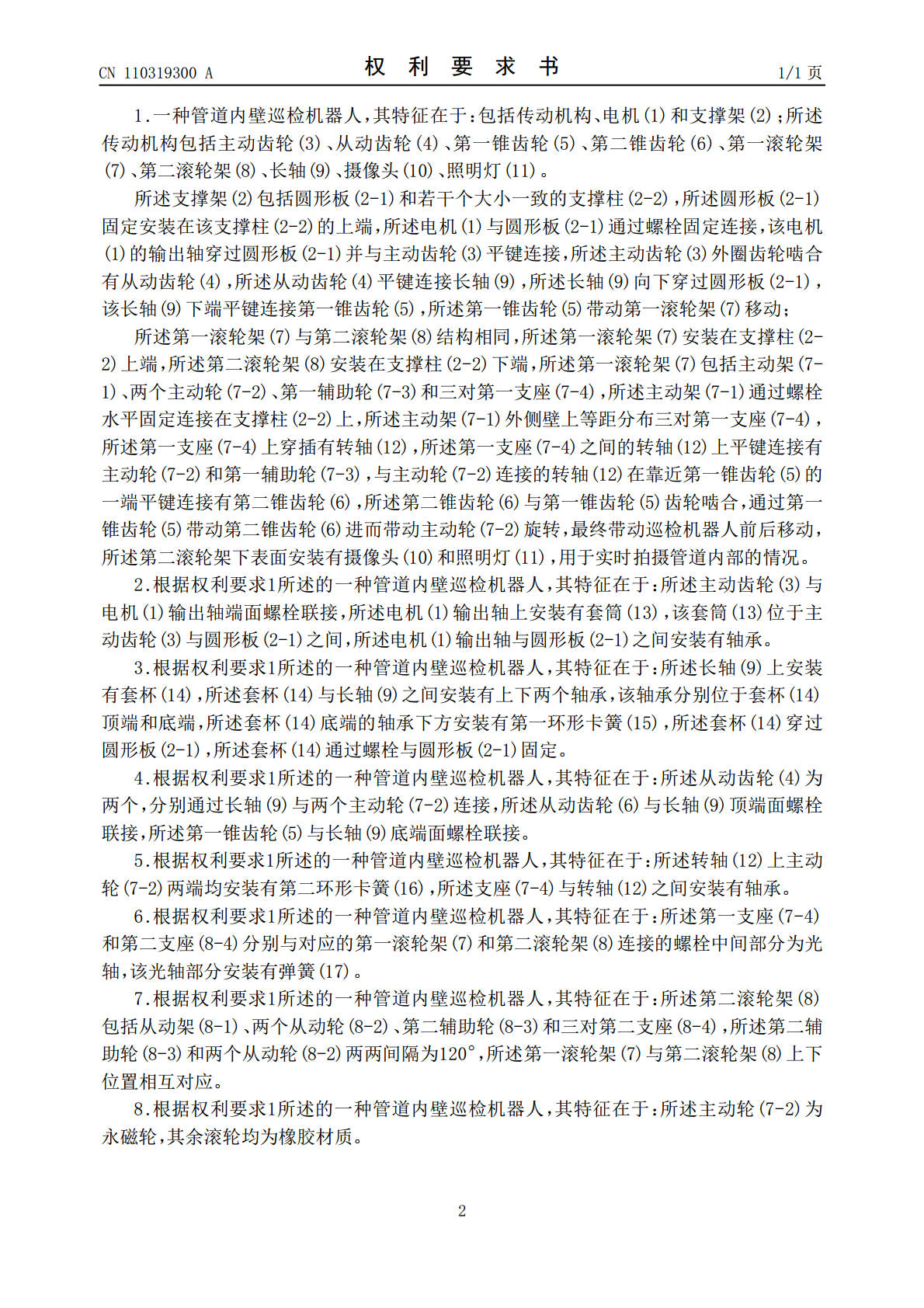
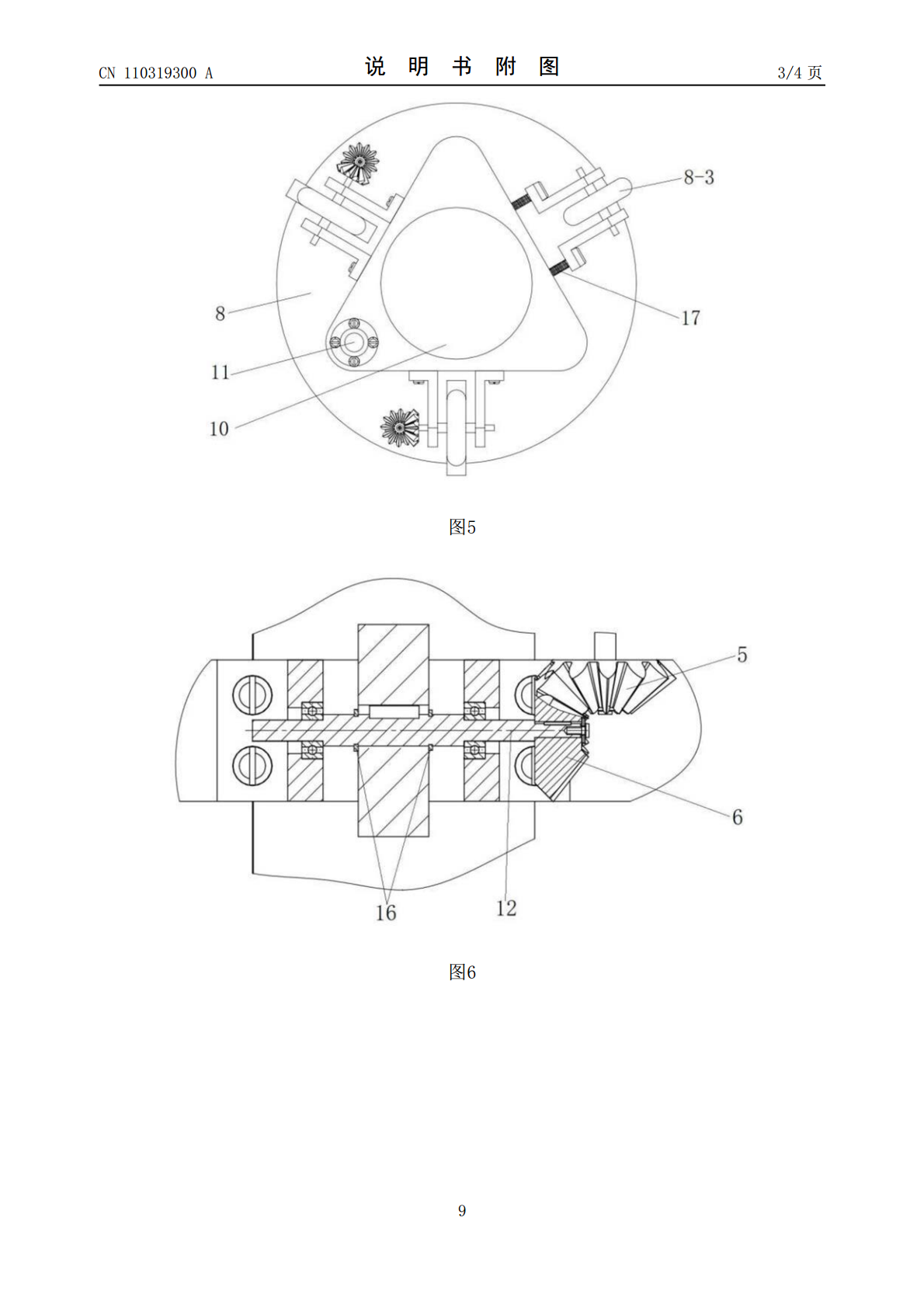
本发明公开了一种管道内壁巡检机器人,包括传动机构、电机和支撑架,传动机构包括主动齿轮、从动齿轮、第一锥齿轮、第二锥齿轮、第一滚轮架、第二滚轮架、长轴、摄像头、照明灯,支撑架包括圆形板和支撑柱,圆形板固定安装在支撑柱的上端,电机与圆形板通过螺栓固定连接,电机的输出轴穿过圆形板并与主动齿轮平键连接,主动齿轮外圈齿轮啮合有从动齿轮,从动齿轮平键连接长轴,长轴向下穿过圆形板,该长轴下端平键连接第一锥齿轮,第一锥齿轮带动巡检机器人前后移动,第二滚轮架下表面安装有摄像头和照明灯,用于实时拍摄管道内部的情况。本结构可以
一种海底管道巡检机器人巡检架.pdf
本发明公开了一种海底管道巡检机器人巡检架,包括:连接支撑件,连接支撑件包括连接圈、连接支撑杆、前端支撑管、后端支撑管和开合件,连接支撑杆设置在连接圈上,前端支撑管和后端支撑管均设置在连接支撑杆上,开合件设置在前端支撑管上;管道扣紧爬行件,管道扣紧爬行件能够带动连接支撑件在海底管道上爬行;行走动力件,行走动力件能够为管道扣紧爬行件提供动力;管道绕行件,管道绕行件包括环绕轨道带、设备安装板和绕行动力件,环绕轨道带设置在连接支撑杆上,设备安装板设置在环绕轨道带上,绕行动力件设置在设备安装板上。本发明结构设计合理
一种管道巡检机器人.pdf
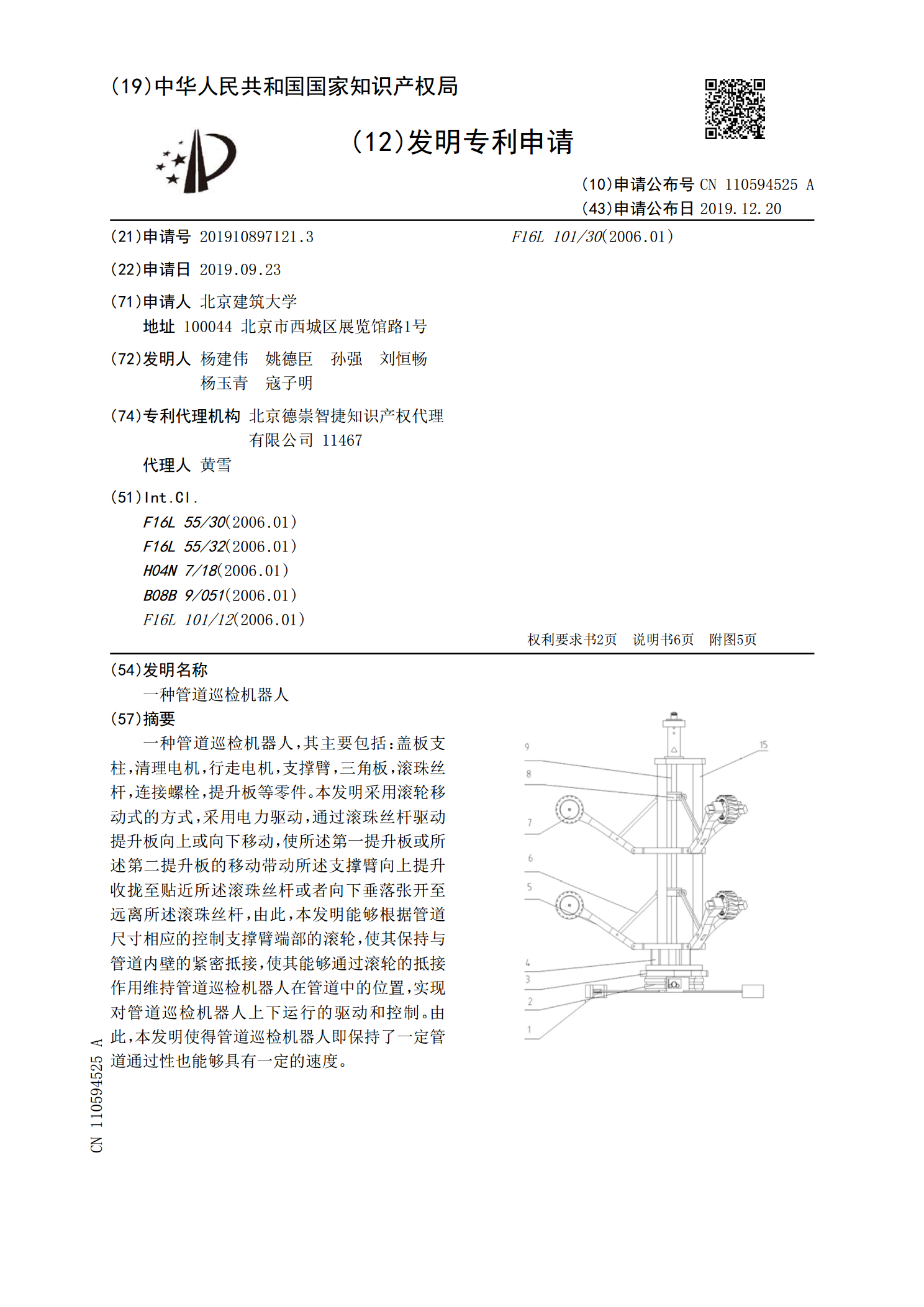
一种管道巡检机器人,其主要包括:盖板支柱,清理电机,行走电机,支撑臂,三角板,滚珠丝杆,连接螺栓,提升板等零件。本发明采用滚轮移动式的方式,采用电力驱动,通过滚珠丝杆驱动提升板向上或向下移动,使所述第一提升板或所述第二提升板的移动带动所述支撑臂向上提升收拢至贴近所述滚珠丝杆或者向下垂落张开至远离所述滚珠丝杆,由此,本发明能够根据管道尺寸相应的控制支撑臂端部的滚轮,使其保持与管道内壁的紧密抵接,使其能够通过滚轮的抵接作用维持管道巡检机器人在管道中的位置,实现对管道巡检机器人上下运行的驱动和控制。由此,本发明
一种管道巡检机器人.pdf
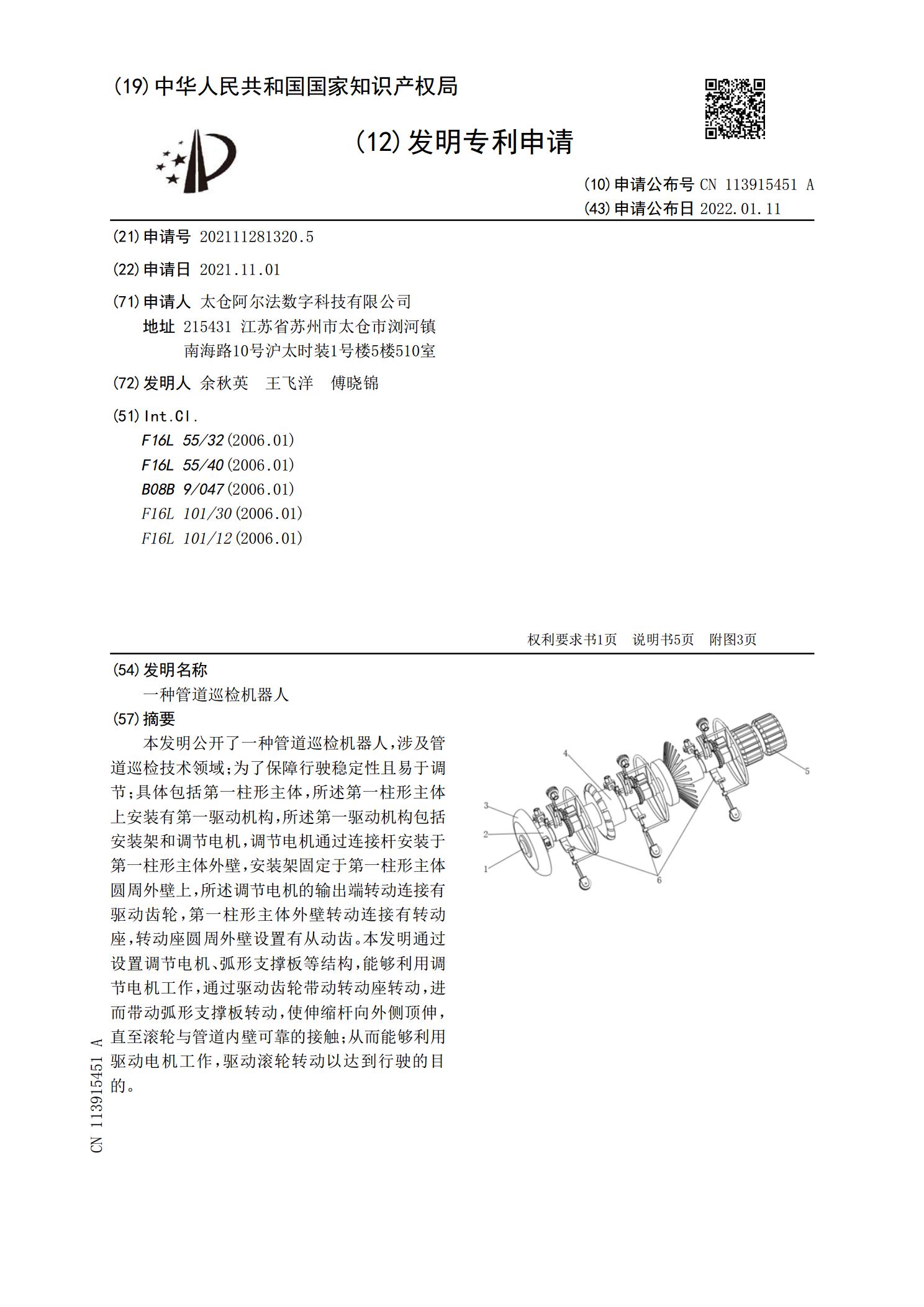
本发明公开了一种管道巡检机器人,涉及管道巡检技术领域;为了保障行驶稳定性且易于调节;具体包括第一柱形主体,所述第一柱形主体上安装有第一驱动机构,所述第一驱动机构包括安装架和调节电机,调节电机通过连接杆安装于第一柱形主体外壁,安装架固定于第一柱形主体圆周外壁上,所述调节电机的输出端转动连接有驱动齿轮,第一柱形主体外壁转动连接有转动座,转动座圆周外壁设置有从动齿。本发明通过设置调节电机、弧形支撑板等结构,能够利用调节电机工作,通过驱动齿轮带动转动座转动,进而带动弧形支撑板转动,使伸缩杆向外侧顶伸,直至滚轮与管

电力GIS巡检机器人沿狭小空间管道内壁攀爬特性分析.pptx
汇报人:/目录01定义与功能结构与组成工作原理应用场景02攀爬方式与技术管道内壁材质与摩擦系数机器人的稳定性分析攀爬过程中的动力学模型03实验设备与环境实验设备:电力GIS巡检机器人、狭小空间管道、测量仪器等实验环境:模拟真实电力GIS环境,设置狭小空间管道实验步骤:a.机器人在管道内壁攀爬,记录攀爬时间、速度等数据b.机器人在管道内壁攀爬,记录攀爬稳定性、安全性等数据c.机器人在管道内壁攀爬,记录攀爬效率、能耗等数据a.机器人在管道内壁攀爬,记录攀爬时间、速度等数据b.机器人在管道内壁攀爬,记录攀爬稳定