
一种可实时收放的旋转式无人机起落架.pdf

音景****ka


1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种可实时收放的旋转式无人机起落架.pdf
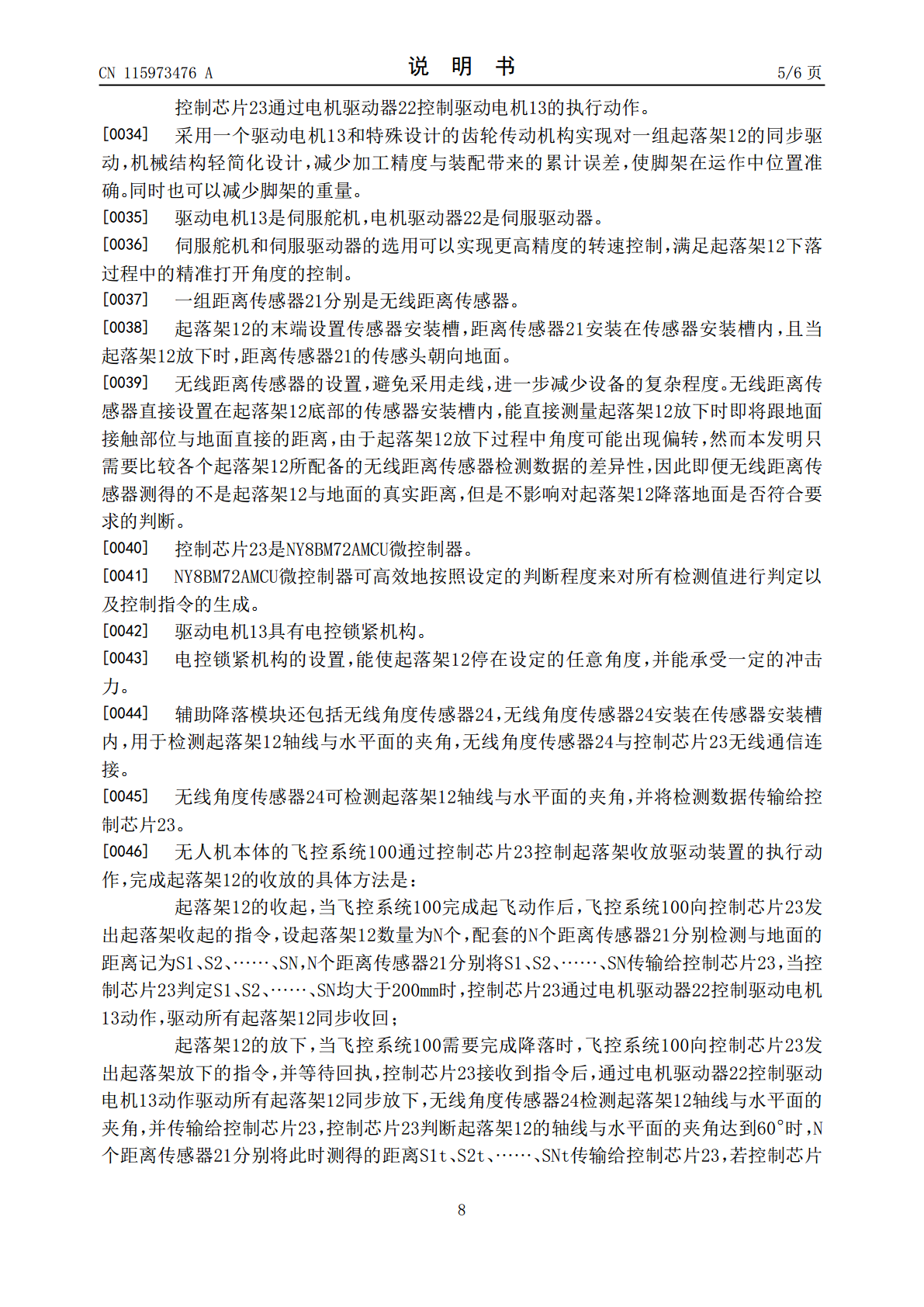
本发明公开一种可实时收放的旋转式无人机起落架,涉及无人机起落架技术领域,包括起落架组件和辅助降落模块;所述起落架组件包括起落架壳体、起落架收放驱动装置和一组起落架,所述起落架壳体的顶面用于连接无人机本体的底部,所述起落架收放驱动装置安装在起落架壳体的内壁上,所述一组起落架通过转轴可转动安装在起落架壳体的外壁上,起落架收放驱动装置用于驱动一组起落架同步完成收放动作。本发明采用单个电机或伺服舵机,可以排除多个电控件之间的差异性;机械结构轻简化设计,减少加工精度与装配带来的累计误差,使脚架在运作中位置准确,控制
一种无人机旋转式起落架.pdf
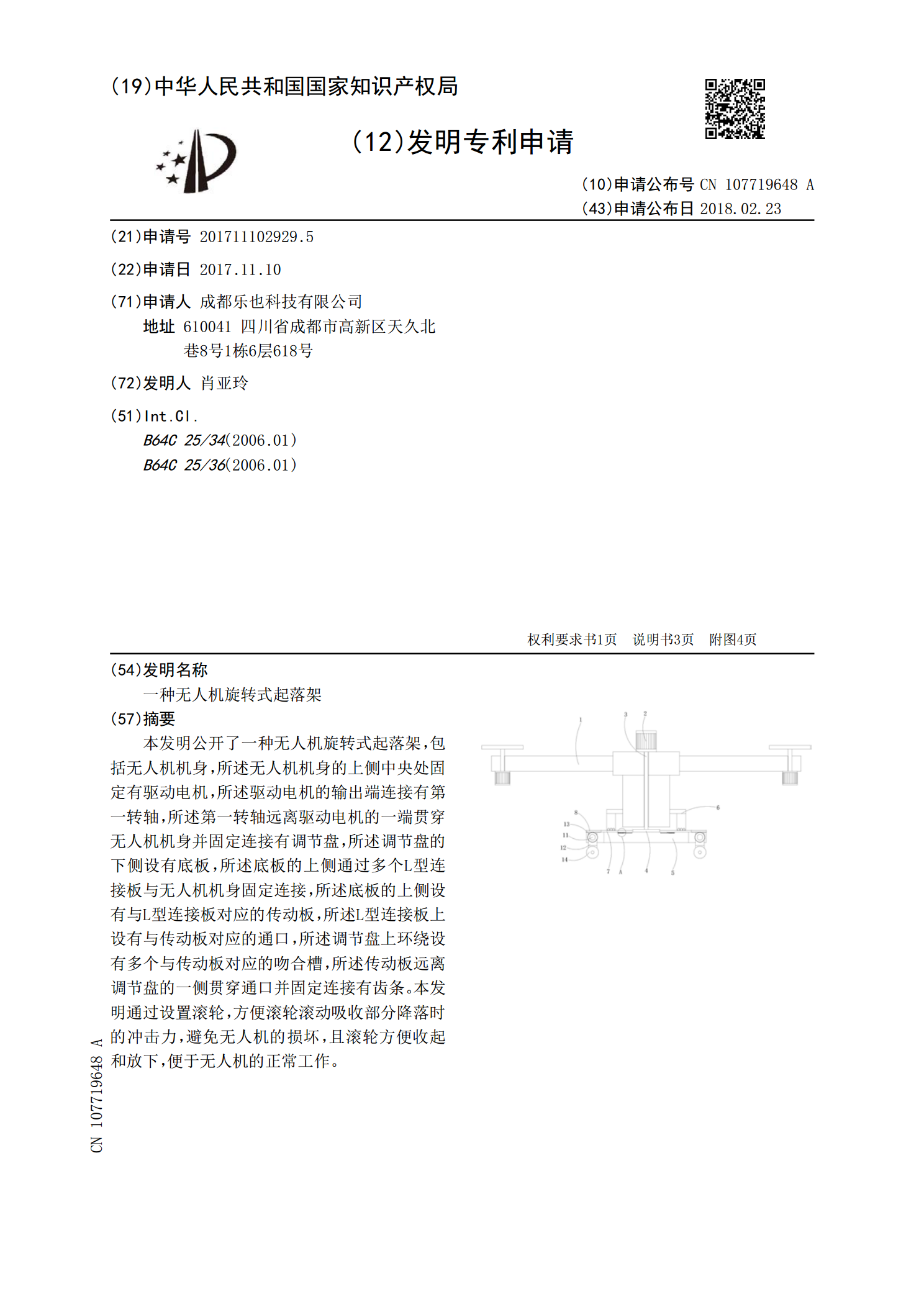
本发明公开了一种无人机旋转式起落架,包括无人机机身,所述无人机机身的上侧中央处固定有驱动电机,所述驱动电机的输出端连接有第一转轴,所述第一转轴远离驱动电机的一端贯穿无人机机身并固定连接有调节盘,所述调节盘的下侧设有底板,所述底板的上侧通过多个L型连接板与无人机机身固定连接,所述底板的上侧设有与L型连接板对应的传动板,所述L型连接板上设有与传动板对应的通口,所述调节盘上环绕设有多个与传动板对应的吻合槽,所述传动板远离调节盘的一侧贯穿通口并固定连接有齿条。本发明通过设置滚轮,方便滚轮滚动吸收部分降落时的冲击力
一种便于对起落架进行收放的无人机.pdf
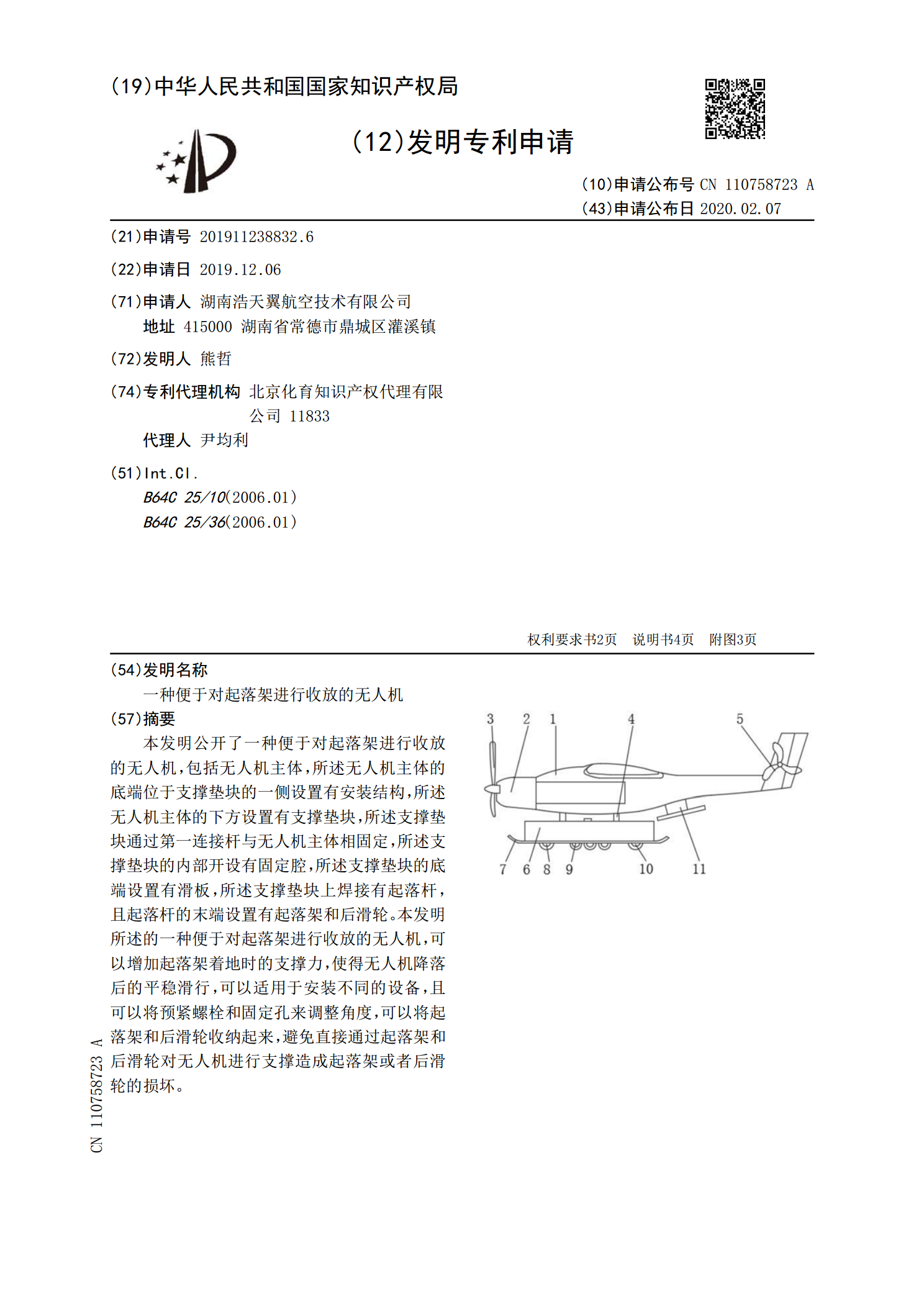
本发明公开了一种便于对起落架进行收放的无人机,包括无人机主体,所述无人机主体的底端位于支撑垫块的一侧设置有安装结构,所述无人机主体的下方设置有支撑垫块,所述支撑垫块通过第一连接杆与无人机主体相固定,所述支撑垫块的内部开设有固定腔,所述支撑垫块的底端设置有滑板,所述支撑垫块上焊接有起落杆,且起落杆的末端设置有起落架和后滑轮。本发明所述的一种便于对起落架进行收放的无人机,可以增加起落架着地时的支撑力,使得无人机降落后的平稳滑行,可以适用于安装不同的设备,且可以将预紧螺栓和固定孔来调整角度,可以将起落架和后滑轮

一种无人机电动收放平稳的起落架.pdf
本发明公开了一种无人机电动收放平稳的起落架,它包括起落架主体、起落架支架和控制器,起落架主体包括支撑柱、伸缩机构、脚架支撑架和两个呈L形的侧板,两个侧板之间且位于侧板的横板上固设有支撑柱,脚架支撑架与起落架支架螺纹连接,限位槽内且位于限位槽的上下壁上分别固设有应力片A和应力片B,伸缩机构包括双作用气缸、上盖和下盖,上盖固定于下盖顶部,双作用气缸前后设置且固定安装于下盖内。本发明的有益效果是:结构紧凑、承载能力强、抗冲击能力强、起落架收放平稳、自动化程度高。

一种电控可移动式无人机收放装置.pdf
本发明公开了一种电控可移动式无人机收放装置,通过系留缆绳连接系留型无人机进行系泊和收放操作,该收放装置包括执行单元及电控系统,所述执行单元包括存储及收放系留缆绳的线缆盘、与线缆盘一端连接并用于驱动线缆盘转动的第一电机、控制收放装置进退的行走单元以及用于控制收放装置转向的方向盘,方向盘处设置有第二电机且该第二电机驱动方向盘左转或右转;所述电控系统包括电控箱,该电控箱根据控制命令驱动所述第一电机、所述行走单元、所述第二电机动作。本发明具有集成化程度高、实用方便等特点。