
一种AGV取放货装置及取放货控制方法.pdf

骊英****bb

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种AGV取放货装置及取放货控制方法.pdf
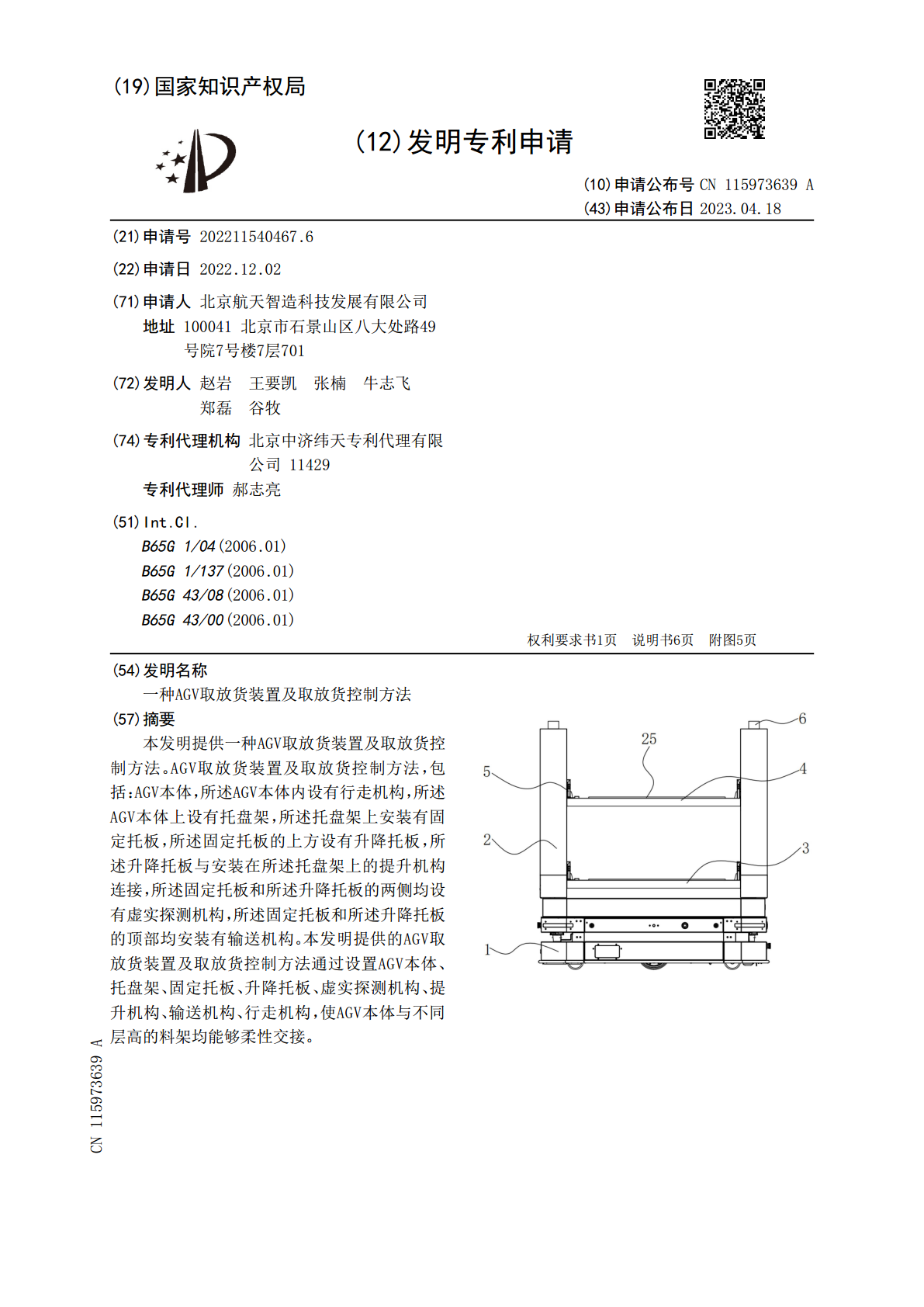
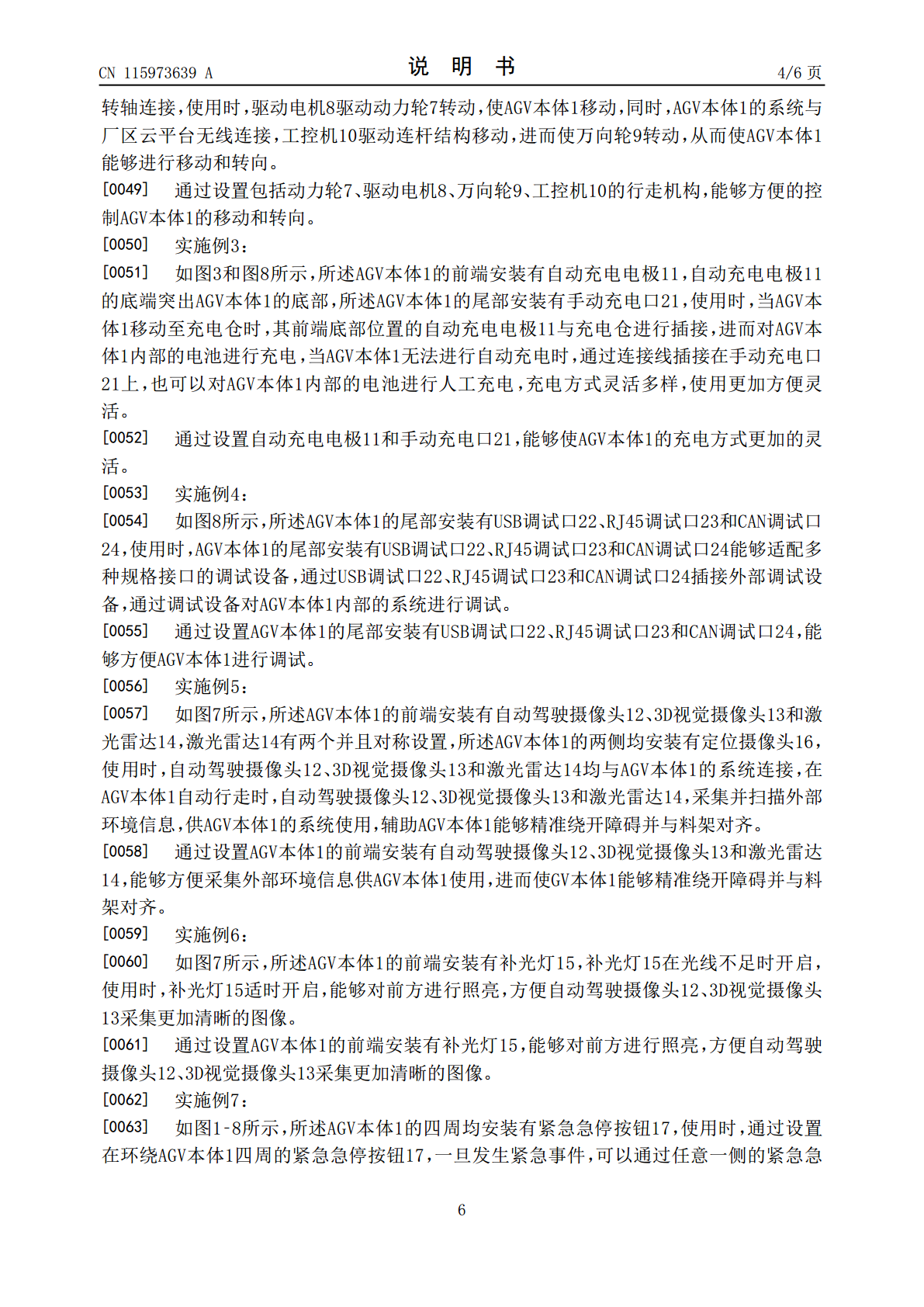
本发明提供一种AGV取放货装置及取放货控制方法。AGV取放货装置及取放货控制方法,包括:AGV本体,所述AGV本体内设有行走机构,所述AGV本体上设有托盘架,所述托盘架上安装有固定托板,所述固定托板的上方设有升降托板,所述升降托板与安装在所述托盘架上的提升机构连接,所述固定托板和所述升降托板的两侧均设有虚实探测机构,所述固定托板和所述升降托板的顶部均安装有输送机构。本发明提供的AGV取放货装置及取放货控制方法通过设置AGV本体、托盘架、固定托板、升降托板、虚实探测机构、提升机构、输送机构、行走机构,使AG
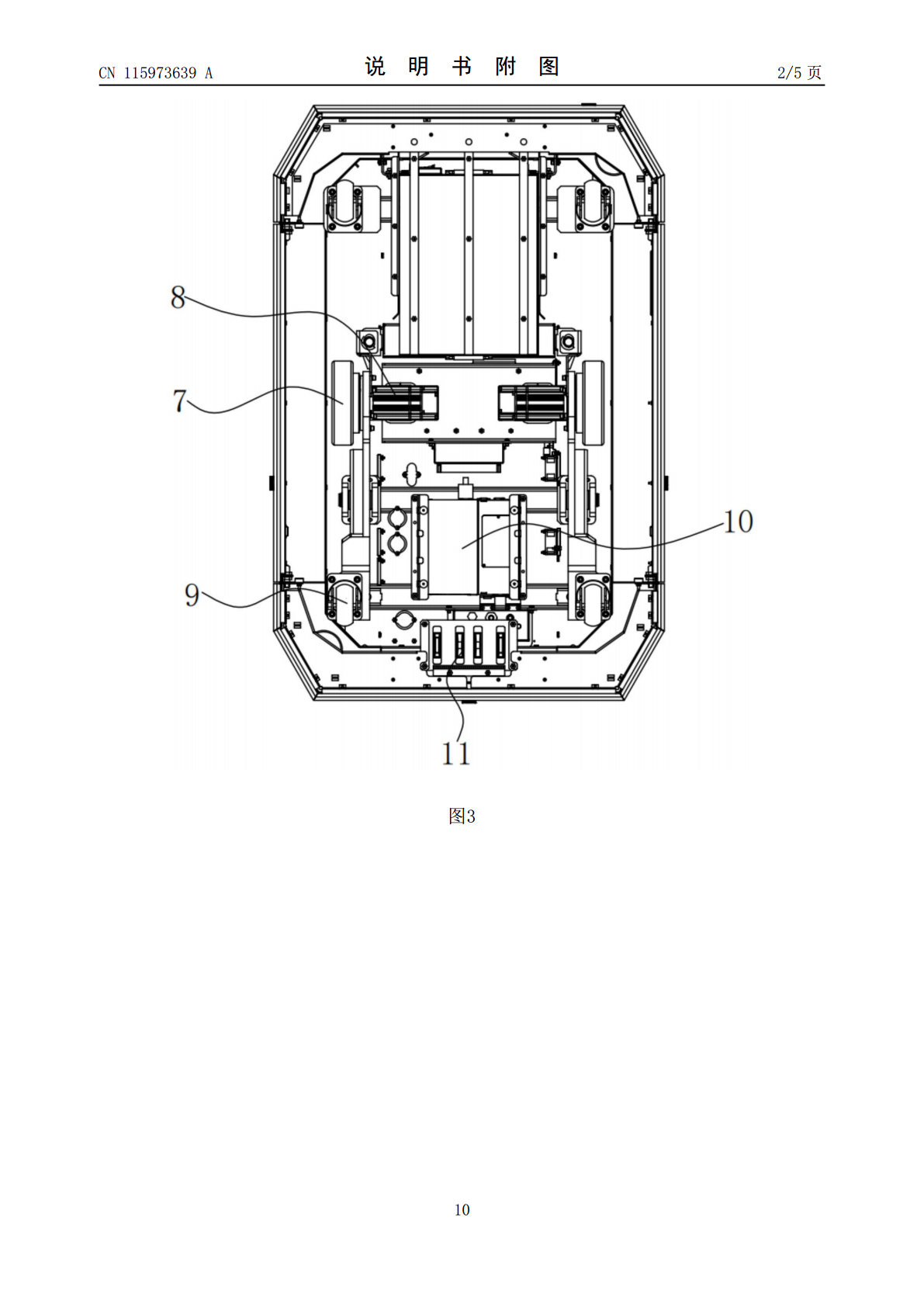
种苗分级取放装置及取放苗方法.pdf
本发明提供一种种苗分级取放装置及取放苗方法,包括末端执行器、取苗控制机构、横移机构、退苗机构、与取苗控制机构和横移机构通信连接的种苗识别机构,末端执行器包括弹性指针和与弹性指针滑动连接的护苗板组件;取苗控制机构驱动末端执行器上下移动,横移机构在育苗穴盘和对应穴盘之间往复移动;退苗机构包括退苗挡杆和退苗气缸,退苗气缸驱动退苗挡杆移动至护苗板组件正上方,取苗控制机构带动护苗板组件与退苗挡杆相抵、带动种苗与护苗板组件底端相抵、以使种苗与弹性指针分离。该种苗分级取放装置可执行种苗分级作业,将未出苗或质量差的种苗丢
一种售货机取放货装置及其工作方法.pdf
本发明公开了一种售货机取放货装置及其工作方法,属于售货机技术领域,该取放货装置包括取放货支座,取放货支座上转动设有取放货件,取放货件的两侧均设有推送件和凸轮件,凸轮件连接有第一驱动机构;凸轮件表面设有第一轮廓和第二轮廓,凸轮件的第一轮廓用于驱使取放货件转动,凸轮件的第二轮廓用于驱使推送件配合取放货件在转动过程中进行取放货。本发明结构巧妙,灵活性高,取货放货平稳,货物损坏率低,货物安全性高。

一种用于图书取放的机械夹具、取放装置及方法.pdf
本发明提供了一种图书自动放还装置,适用于图书馆图书的放还和整理,属于机械自动化领域。本发明由移动小车、升降机构、放还装置和寄存书架组成,在扫描装置、驱动装置和控制系统的作用下实现自动化。放还装置负责将待还图书从寄存书架上取出并放还至图书馆书架上,放还装置包括三坐标移动台、取放装置和撑开装置,取放装置与撑开装置通过旋转关节连接,取放装置可做90°旋转运动,取放装置完成待还图书的取放任务,撑开装置负责留出待还图书在书架上的位置;寄存书架用于存放待还图书,寄存书架一侧为活动挡板。本发明在无需改变现有的图书馆书架

一种便于取放的手术针、刀片取放装置.pdf
本发明属于医疗设备技术领域,尤其是一种便于取放的手术针、刀片取放装置,针对现有的手术过程中,会使用到针和刀片,针和刀片会循环的使用,用完后再丢进利器盒,很多时候都是把针用完后又卡在那个纸片上,需要第二次用的时候又把它拿上来,很容易松动,容易掉,在取放的过程中呢,有时候会不小心刺伤医生手,来回取放选择大小也不方便的问题,现提出以下方案:本发明通过设置有连接杆、一号磁铁条和限位槽,一号磁铁条插接于限位槽的内壁,多个一号磁铁条固定于同一个连接杆上,进行手术针的放置时,可以通过一号磁铁条将其吸附,从而便于存放,也