
一种高精度位姿定位机械臂.pdf

一吃****海逸


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高精度位姿定位机械臂.pdf
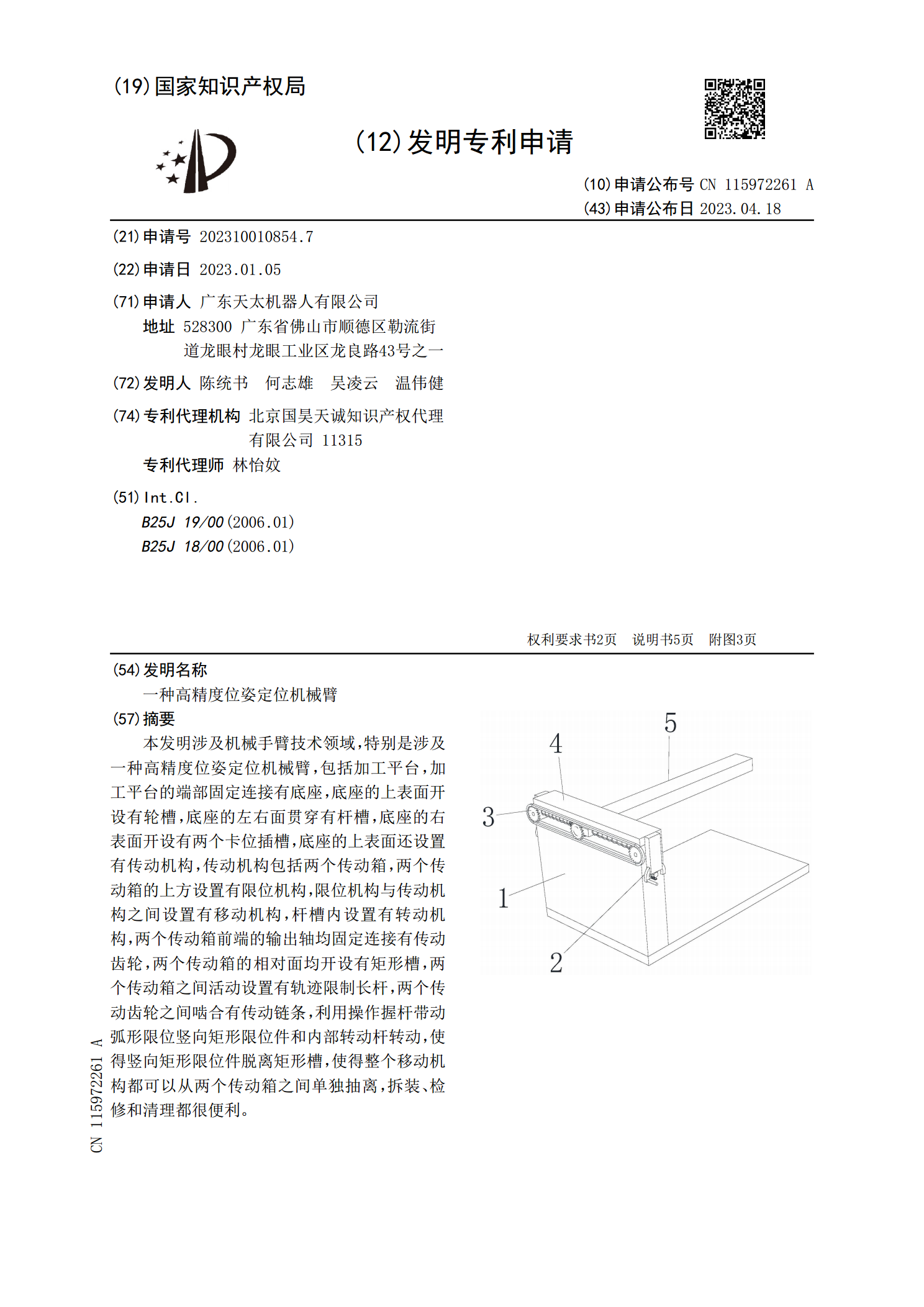
本发明涉及机械手臂技术领域,特别是涉及一种高精度位姿定位机械臂,包括加工平台,加工平台的端部固定连接有底座,底座的上表面开设有轮槽,底座的左右面贯穿有杆槽,底座的右表面开设有两个卡位插槽,底座的上表面还设置有传动机构,传动机构包括两个传动箱,两个传动箱的上方设置有限位机构,限位机构与传动机构之间设置有移动机构,杆槽内设置有转动机构,两个传动箱前端的输出轴均固定连接有传动齿轮,两个传动箱的相对面均开设有矩形槽,两个传动箱之间活动设置有轨迹限制长杆,两个传动齿轮之间啮合有传动链条,利用操作握杆带动弧形限位竖向

面向机械臂抓取应用的高精度目标6D位姿估计.docx
面向机械臂抓取应用的高精度目标6D位姿估计摘要:机械臂抓取应用中,准确估计目标物体的6D位姿是至关重要的。本论文综述了当前机械臂抓取应用中的高精度目标6D位姿估计方法。首先介绍了目标6D位姿估计的背景和意义,然后详细讨论了常用的传感器和算法,并对它们的优缺点进行了评估。最后,通过对比不同方法在实际应用中的表现,总结了目标6D位姿估计的挑战和未来发展方向。关键词:机械臂抓取,目标6D位姿估计,传感器,算法1.引言机械臂在工业、农业、医疗等领域的应用越来越广泛。在许多机械臂的应用中,准确估计目标物体的6D位姿

一种用于凿岩台车机械臂的位姿处理装置.pdf
一种用于凿岩台车机械臂的位姿处理装置,包括处理器、感应机构、接口组件、显示屏、参考组件、电源模块和拨码开关;感应机构包括若干个设置在凿岩台车机械臂上的编码器;接口组件包括第一CAN接口、第二CAN接口、USB接口和串行收发器,第一CAN接口与处理器和感应机构均电性连接,第二CAN接口和USB接口均与处理器电性连接,串行收发器通过转换芯片与处理器电性连接;显示屏与处理器电性连接;参考组件包括与处理器电性连接的有源晶振和基准模块;电源模块与处理器电性连接;拨码开关与处理器电性连接。本实用新型提供一种用于凿岩台
一种机械臂末端位姿误差测量方法及系统.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN112880562A(43)申请公布日2021.06.01(21)申请号CN202110070623.6(22)申请日2021.01.19(71)申请人佛山职业技术学院地址528137广东省佛山市三水区乐平镇职教路3号佛山职业技术学院(72)发明人张炜耿金华朱炯光邵鹏尹树彬(74)专利代理机构44205广州嘉权专利商标事务所有限公司代理人谭志鹏(51)Int.CIG01B11/00(20060101)G06T7/00(2017
一种机械臂末端位姿误差测量方法及系统.pdf
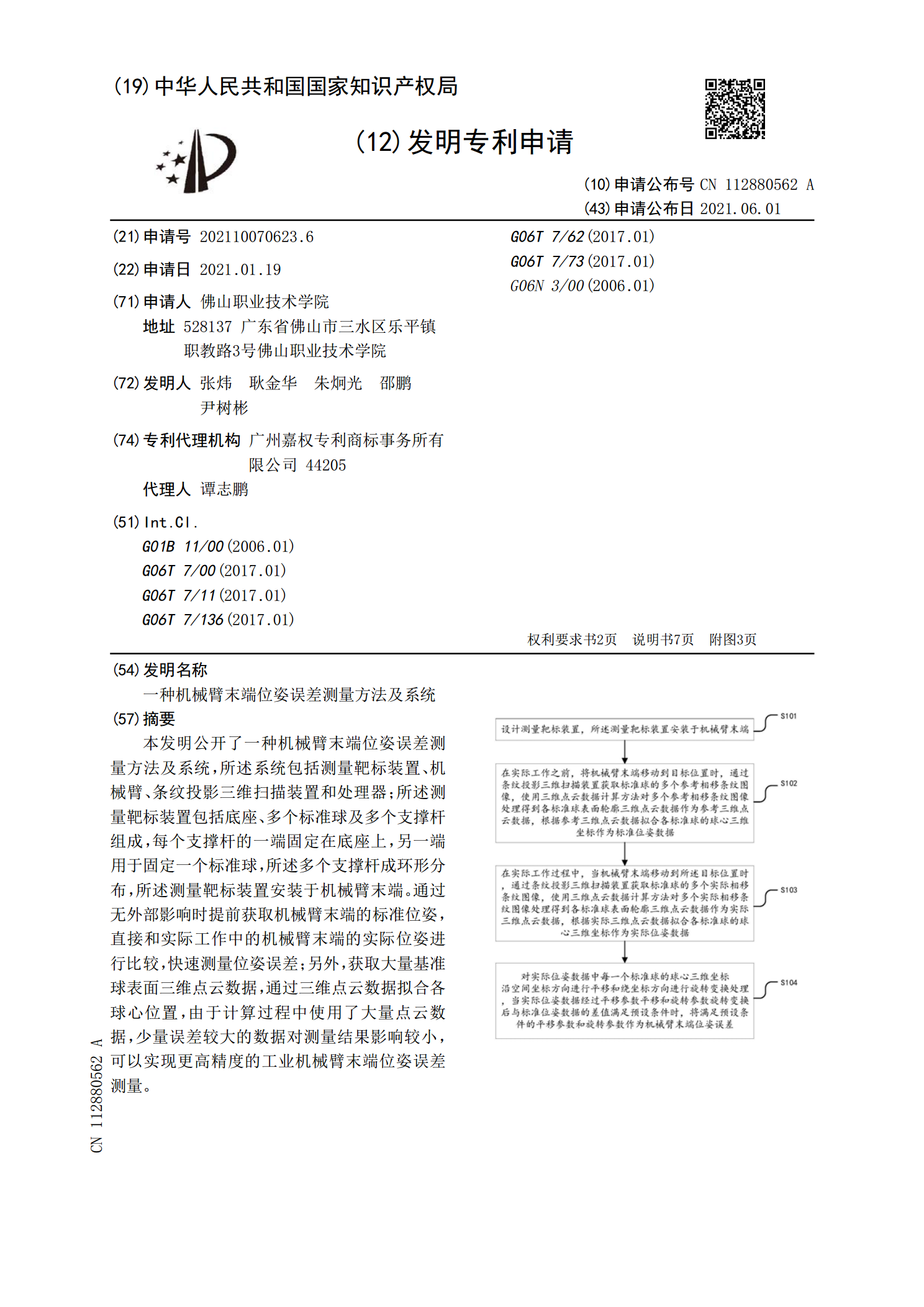
本发明公开了一种机械臂末端位姿误差测量方法及系统,所述系统包括测量靶标装置、机械臂、条纹投影三维扫描装置和处理器;所述测量靶标装置包括底座、多个标准球及多个支撑杆组成,每个支撑杆的一端固定在底座上,另一端用于固定一个标准球,所述多个支撑杆成环形分布,所述测量靶标装置安装于机械臂末端。通过无外部影响时提前获取机械臂末端的标准位姿,直接和实际工作中的机械臂末端的实际位姿进行比较,快速测量位姿误差;另外,获取大量基准球表面三维点云数据,通过三维点云数据拟合各球心位置,由于计算过程中使用了大量点云数据,少量误差较