
面向机械臂抓取应用的高精度目标6D位姿估计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

面向机械臂抓取应用的高精度目标6D位姿估计.docx
面向机械臂抓取应用的高精度目标6D位姿估计摘要:机械臂抓取应用中,准确估计目标物体的6D位姿是至关重要的。本论文综述了当前机械臂抓取应用中的高精度目标6D位姿估计方法。首先介绍了目标6D位姿估计的背景和意义,然后详细讨论了常用的传感器和算法,并对它们的优缺点进行了评估。最后,通过对比不同方法在实际应用中的表现,总结了目标6D位姿估计的挑战和未来发展方向。关键词:机械臂抓取,目标6D位姿估计,传感器,算法1.引言机械臂在工业、农业、医疗等领域的应用越来越广泛。在许多机械臂的应用中,准确估计目标物体的6D位姿

一种用于机械臂抓取系统中目标物体的位姿估计方法.pdf
本发明提供一种用于机械臂抓取系统中目标物体的位姿估计方法,包括如下步骤:S1:渲染训练数据集;S2:构建目标物体的位姿估计级联网络,所述级联网络采用三个轻量级网络级联的方式;S3:训练所述目标物体的位姿估计级联网络。通过采用级联网络,使姿态估计问题成为分类问题,减少网络训练测试时间,提高检测精度。

面向无序堆叠工件抓取的位姿估计方法研究.docx
面向无序堆叠工件抓取的位姿估计方法研究研究背景和意义:面向无序堆叠工件抓取的位姿估计是一个具有挑战性的问题。在工业领域中,许多任务需要机器人能够准确地识别和抓取无序堆叠的工件。例如,在物流和仓储中,机器人需要能够识别出堆叠在一起的不同物品,并将其分开或装载到另一个位置。在制造业中,机器人需要能够准确地抓取并定位零部件以进行组装或加工。然而,由于工件的无序性、变形和相互覆盖造成的遮挡,以及光照条件的不稳定性,无序堆叠工件的位姿估计变得复杂而困难。准确的位姿估计有助于提高机器人处理无序堆叠工件的能力。它可以提

面向无序堆叠工件抓取的位姿估计方法研究的开题报告.docx
面向无序堆叠工件抓取的位姿估计方法研究的开题报告一、研究背景随着智能制造的不断发展,自动化生产线的普及,机器人技术得到了广泛的应用。而在现实生产中,机器人抓取工件是非常重要的一个环节。然而,对于无序堆叠的物品,传统的机器人抓取技术存在着一定的局限性,这给机器人的抓取带来了一定的困难。在无序堆叠工件抓取中,机器人需要实时感知堆叠工件的位姿信息,以便实现精准的抓取。因此,需要对位姿估计方法进行研究。目前,深度学习技术被广泛应用于位姿估计方面,具有较高的精度和实时性。因此,本文基于深度学习技术,研究面向无序堆叠
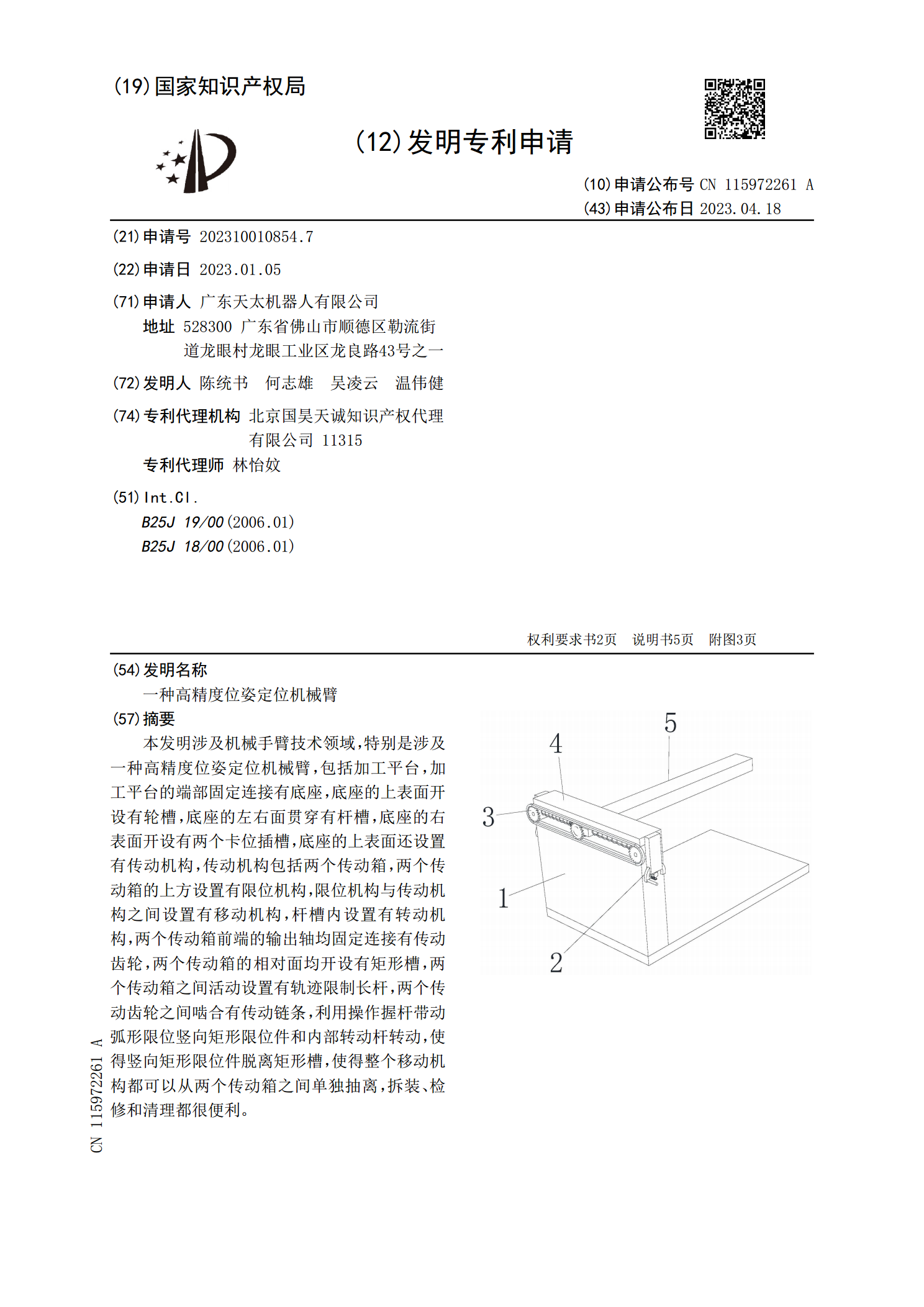
一种高精度位姿定位机械臂.pdf
本发明涉及机械手臂技术领域,特别是涉及一种高精度位姿定位机械臂,包括加工平台,加工平台的端部固定连接有底座,底座的上表面开设有轮槽,底座的左右面贯穿有杆槽,底座的右表面开设有两个卡位插槽,底座的上表面还设置有传动机构,传动机构包括两个传动箱,两个传动箱的上方设置有限位机构,限位机构与传动机构之间设置有移动机构,杆槽内设置有转动机构,两个传动箱前端的输出轴均固定连接有传动齿轮,两个传动箱的相对面均开设有矩形槽,两个传动箱之间活动设置有轨迹限制长杆,两个传动齿轮之间啮合有传动链条,利用操作握杆带动弧形限位竖向