
一种针对车厢的智能腻子喷涂方法及系统.pdf

志信****pp

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种针对车厢的智能腻子喷涂方法及系统.pdf
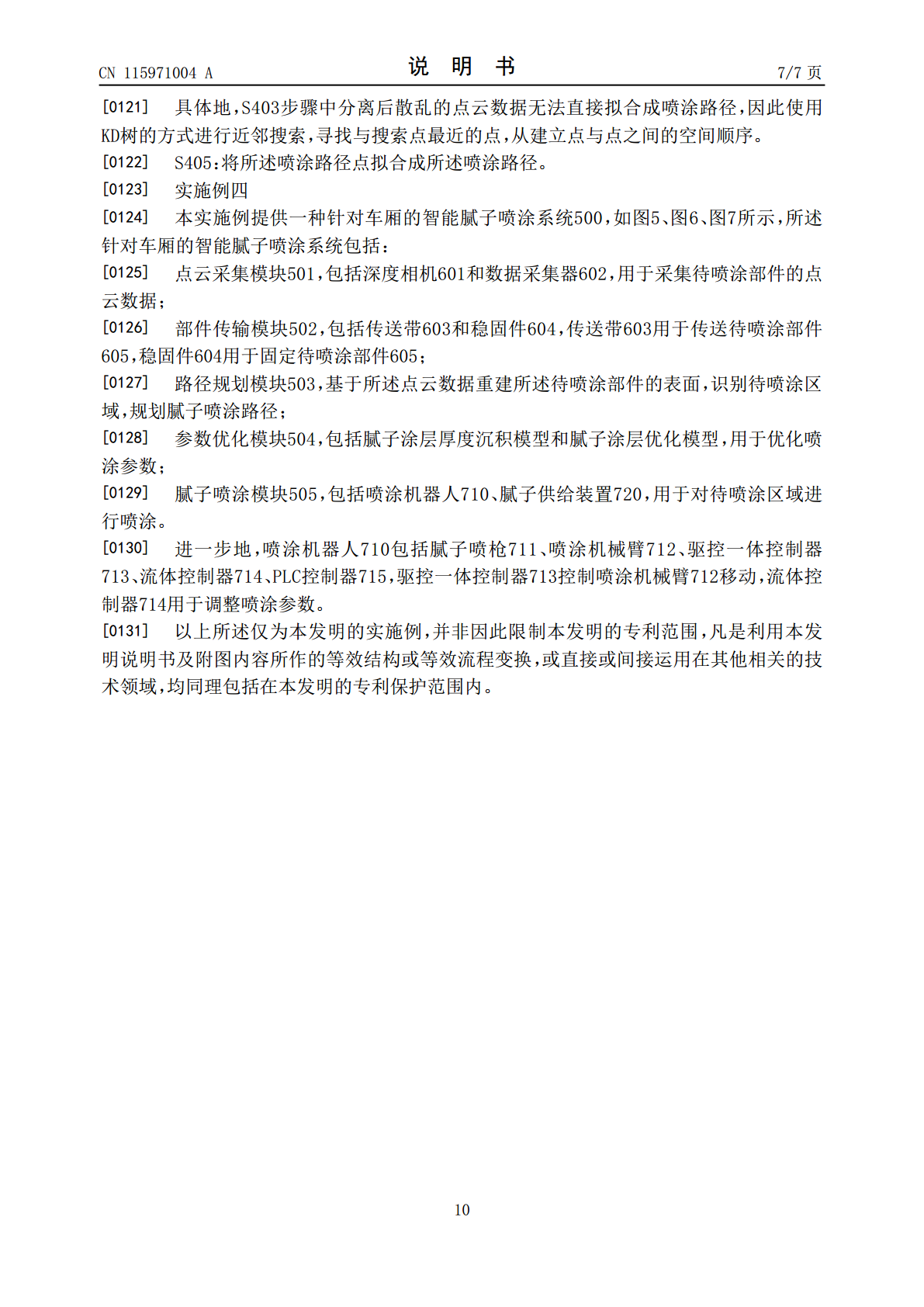
本发明公开了一种针对车厢的智能腻子喷涂方法及系统,该方法包括:深度相机扫描待喷涂部件,获取待喷涂部件的点云数据;根据所述点云数据通过CGAL构建所述待喷涂部件表面的三维模型;根据所述三维模型通过深度卷积网络检测出待喷涂区域;根据所述待喷涂区域通过点云切片的方式规划喷涂路径;根据喷涂工艺和所述喷涂路径建立腻子涂层厚度沉积模型和腻子涂层优化模型,优化喷涂参数;喷涂机器人按所述喷涂路径和所述喷涂参数对所述待喷涂区域进行喷涂。本发明采用深度相机采集点云数据,通过深度卷积网络识别车厢焊缝、凹槽,以点云切片的方式进行
一种压敏涂料智能自动喷涂系统及喷涂方法.pdf
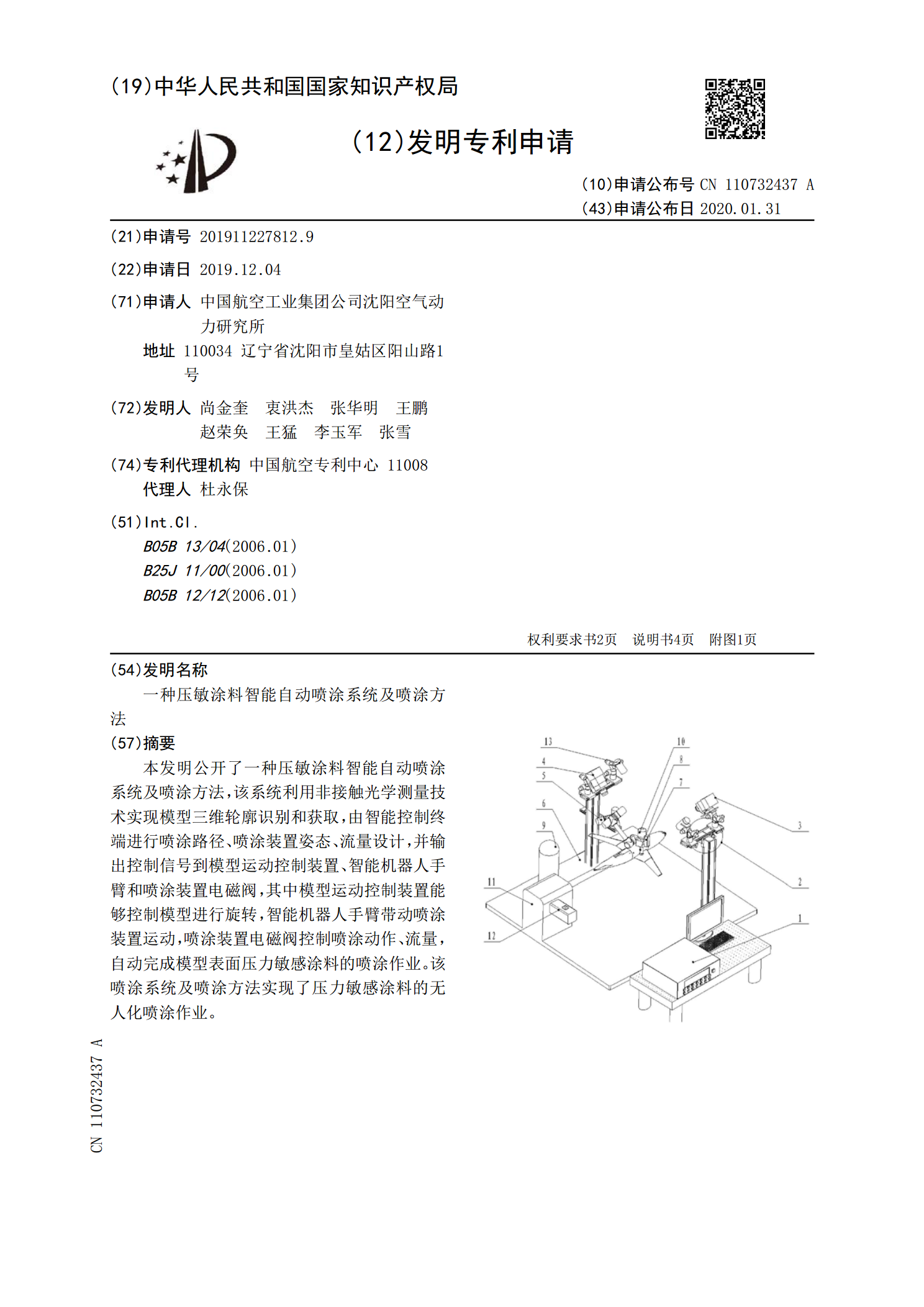
本发明公开了一种压敏涂料智能自动喷涂系统及喷涂方法,该系统利用非接触光学测量技术实现模型三维轮廓识别和获取,由智能控制终端进行喷涂路径、喷涂装置姿态、流量设计,并输出控制信号到模型运动控制装置、智能机器人手臂和喷涂装置电磁阀,其中模型运动控制装置能够控制模型进行旋转,智能机器人手臂带动喷涂装置运动,喷涂装置电磁阀控制喷涂动作、流量,自动完成模型表面压力敏感涂料的喷涂作业。该喷涂系统及喷涂方法实现了压力敏感涂料的无人化喷涂作业。
一种新型腻子材料智能机器人喷涂生产线.pdf
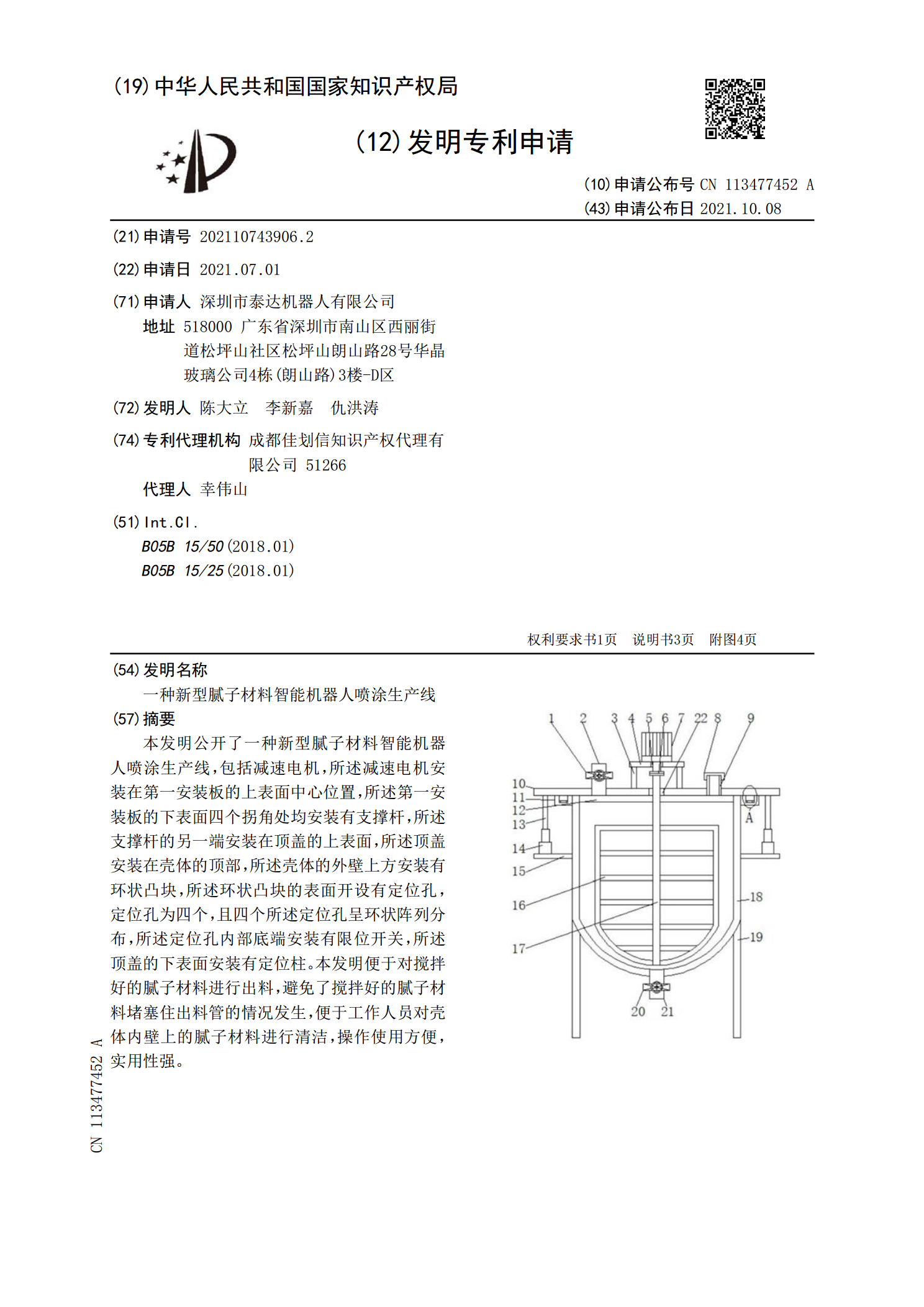
本发明公开了一种新型腻子材料智能机器人喷涂生产线,包括减速电机,所述减速电机安装在第一安装板的上表面中心位置,所述第一安装板的下表面四个拐角处均安装有支撑杆,所述支撑杆的另一端安装在顶盖的上表面,所述顶盖安装在壳体的顶部,所述壳体的外壁上方安装有环状凸块,所述环状凸块的表面开设有定位孔,定位孔为四个,且四个所述定位孔呈环状阵列分布,所述定位孔内部底端安装有限位开关,所述顶盖的下表面安装有定位柱。本发明便于对搅拌好的腻子材料进行出料,避免了搅拌好的腻子材料堵塞住出料管的情况发生,便于工作人员对壳体内壁上的腻

腻子喷涂机视频,柱塞式腻子喷涂机.doc
砂浆腻子多功能喷涂机邢台机械设备制造总厂联系电话:400-663-7669400-6250-160手机:1873296999115132922229赵经理工程实例喷涂机适合施工:适合室内外墙喷涂、水泥砂浆灌浆、腻子粉桥梁灌浆及防水表面喷涂、防火喷涂、保温材料喷涂、天花顶喷涂、墙壁喷涂、涂料喷涂、园林喷涂、浮雕效果涂料喷涂、工艺品喷涂、假山喷涂、吸音材料喷涂、防水堵漏、防水补漏、对于在桥梁、水坝、山坡、地下室、隧道、房屋厂厦施工轻巧方便;另有:高压灌注机.喷涂机特点:1.适应喷涂材料:腻子粉、涂料、乳胶漆、

一种智能轮毂喷涂系统及工艺.pdf
本发明涉及一种智能轮毂喷涂系统及工艺,系统包括:对轮毂表面进行喷涂的色漆喷漆单元、UV喷漆单元、UV固化单元,其中,所述的色漆喷涂单元对轮毂表面进行色漆喷涂;所述UV喷漆单元,在所述的色漆喷涂单元对轮毂表面进行色漆喷涂后对轮毂表面进行UV漆喷涂;所述的UV固化单元,在UV漆喷涂完成后,通过磁控溅射方式对轮毂表面进行固化;还包括对各个单元送风的送风机组。本发明智能轮毂喷涂系统及工艺,高效率低能耗操控性好良品率高设备短小,配置灵活;UV漆本身可以实现高固含操作,因此相比传统涂装的丙烯酸烤漆还具有低VOC排放优