
基于自适应视点采样的无人机全覆盖路径规划方法及系统.pdf

冬易****娘子

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于自适应视点采样的无人机全覆盖路径规划方法及系统.pdf
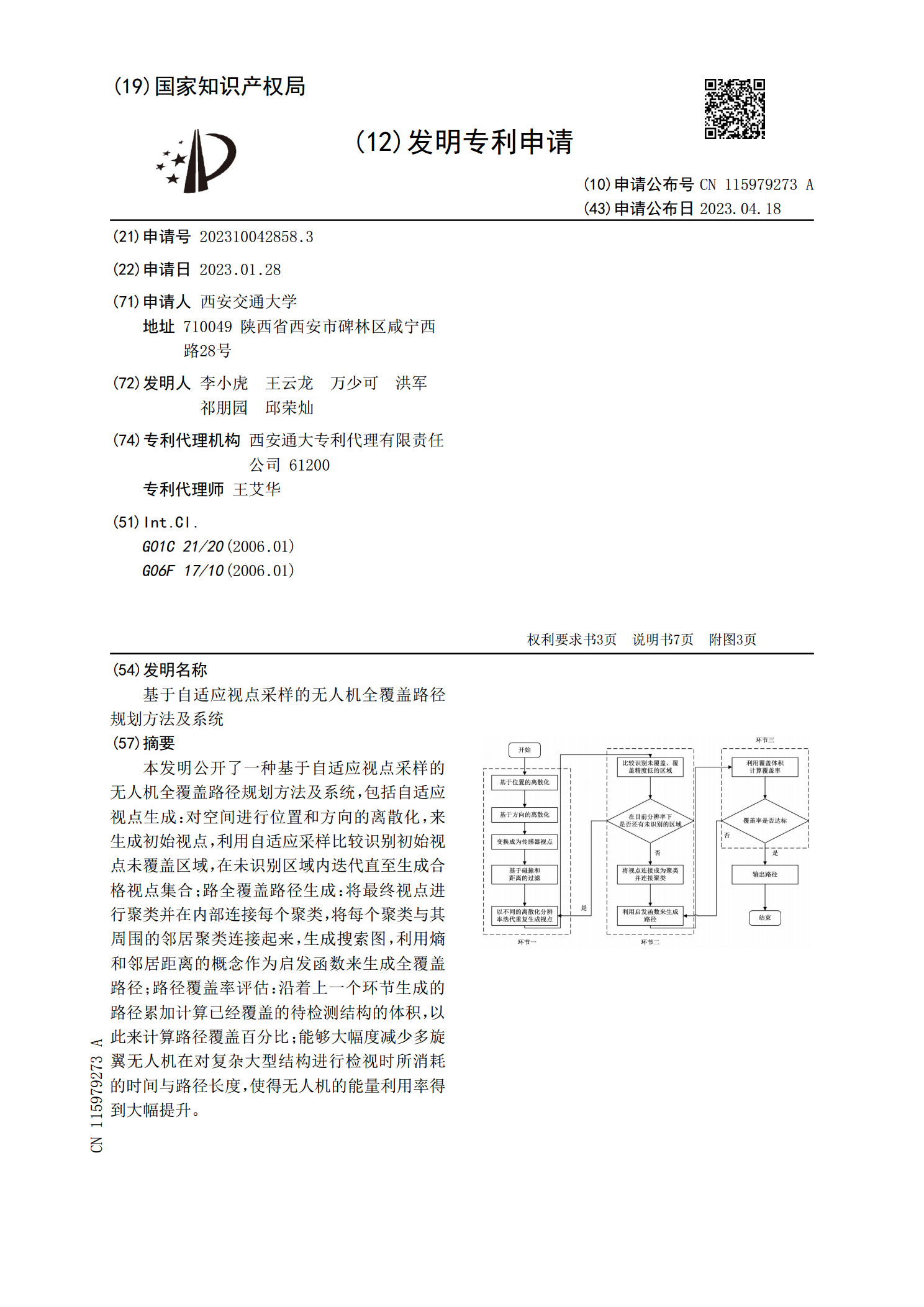
本发明公开了一种基于自适应视点采样的无人机全覆盖路径规划方法及系统,包括自适应视点生成:对空间进行位置和方向的离散化,来生成初始视点,利用自适应采样比较识别初始视点未覆盖区域,在未识别区域内迭代直至生成合格视点集合;路全覆盖路径生成:将最终视点进行聚类并在内部连接每个聚类,将每个聚类与其周围的邻居聚类连接起来,生成搜索图,利用熵和邻居距离的概念作为启发函数来生成全覆盖路径;路径覆盖率评估:沿着上一个环节生成的路径累加计算已经覆盖的待检测结构的体积,以此来计算路径覆盖百分比;能够大幅度减少多旋翼无人机在对复
一种基于全覆盖路径的植保无人机航线规划方法.pdf
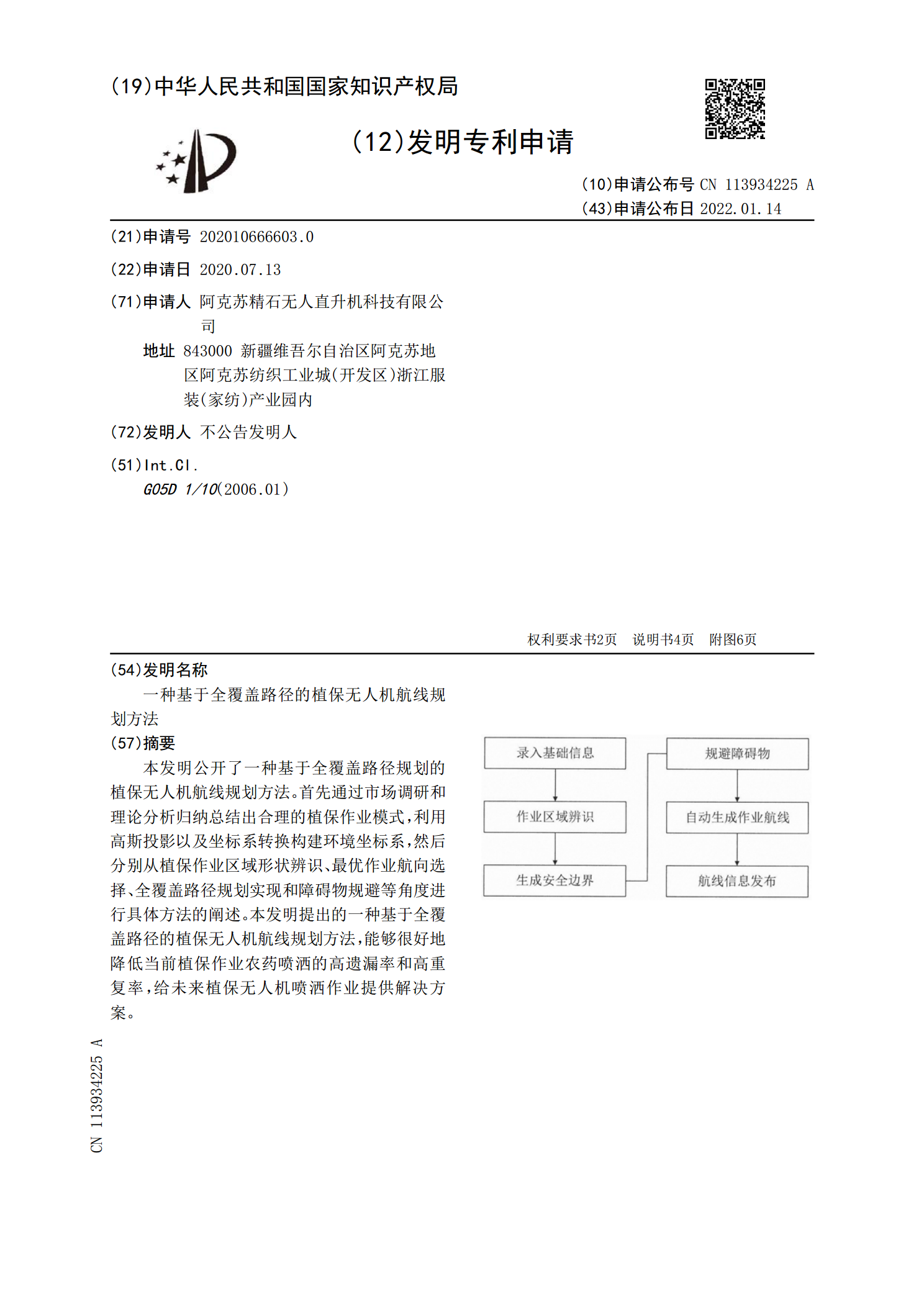
本发明公开了一种基于全覆盖路径规划的植保无人机航线规划方法。首先通过市场调研和理论分析归纳总结出合理的植保作业模式,利用高斯投影以及坐标系转换构建环境坐标系,然后分别从植保作业区域形状辨识、最优作业航向选择、全覆盖路径规划实现和障碍物规避等角度进行具体方法的阐述。本发明提出的一种基于全覆盖路径的植保无人机航线规划方法,能够很好地降低当前植保作业农药喷洒的高遗漏率和高重复率,给未来植保无人机喷洒作业提供解决方案。
一种基于路径时间代价的无人机路径规划方法及系统.pdf
本发明涉及一种基于路径时间代价的无人机路径规划方法及系统,可根据无人机的运动约束条件、可飞行区域和障碍信息,以路径时间最短为目标,通过定制设计路径搜索过程中的节点扩展方式和节点代价计算机制,能够生成时间最短的无人机避障飞行路径。

灌溉机器人全覆盖路径规划方法.docx
灌溉机器人全覆盖路径规划方法1.内容概要介绍了灌溉机器人在现代农业中的应用背景和重要意义,以及目前国内外研究现状和存在的问题。针对现有技术在灌溉机器人路径规划方面的不足,提出了本研究的目的和意义。简要介绍了常用的路径规划算法(如Dijkstra算法、A算法等),并与本研究所使用的全覆盖路径规划方法进行了对比分析。对覆盖区域的概念、计算方法以及基于覆盖区域的路径规划方法进行了阐述。详细介绍了本研究所提出的全覆盖路径规划方法,包括以下几个关键步骤:利用已有的路径规划算法或提出新的算法,为机器人生成全覆盖的路径
基于变频蝙蝠算法的农业无人机路径规划方法及系统.pdf
本发明公开了基于变频蝙蝠算法的农业无人机路径规划方法及系统,该方法包括:获取巡检地地形和威胁区域并生成三维环境;根据三维环境和无人机约束条件构建总成本函数;基于圆柱矢量坐标,根据变频蝙蝠算法并结合总成本函数,得到无人机飞行路径的局部最优解和全局最优解;根据变频蝙蝠算法对无人机飞行路径的局部最优解和全局最优解进行更新,输出最优路径。通过使用本发明,能够实现更加安全低能耗的无人机路径规划。本发明作为基于变频蝙蝠算法的农业无人机路径规划方法及系统,可广泛应用于农业巡检技术领域。