
自主打磨装置及其打磨方法.pdf

猫巷****雪凝

1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自主打磨装置及其打磨方法.pdf
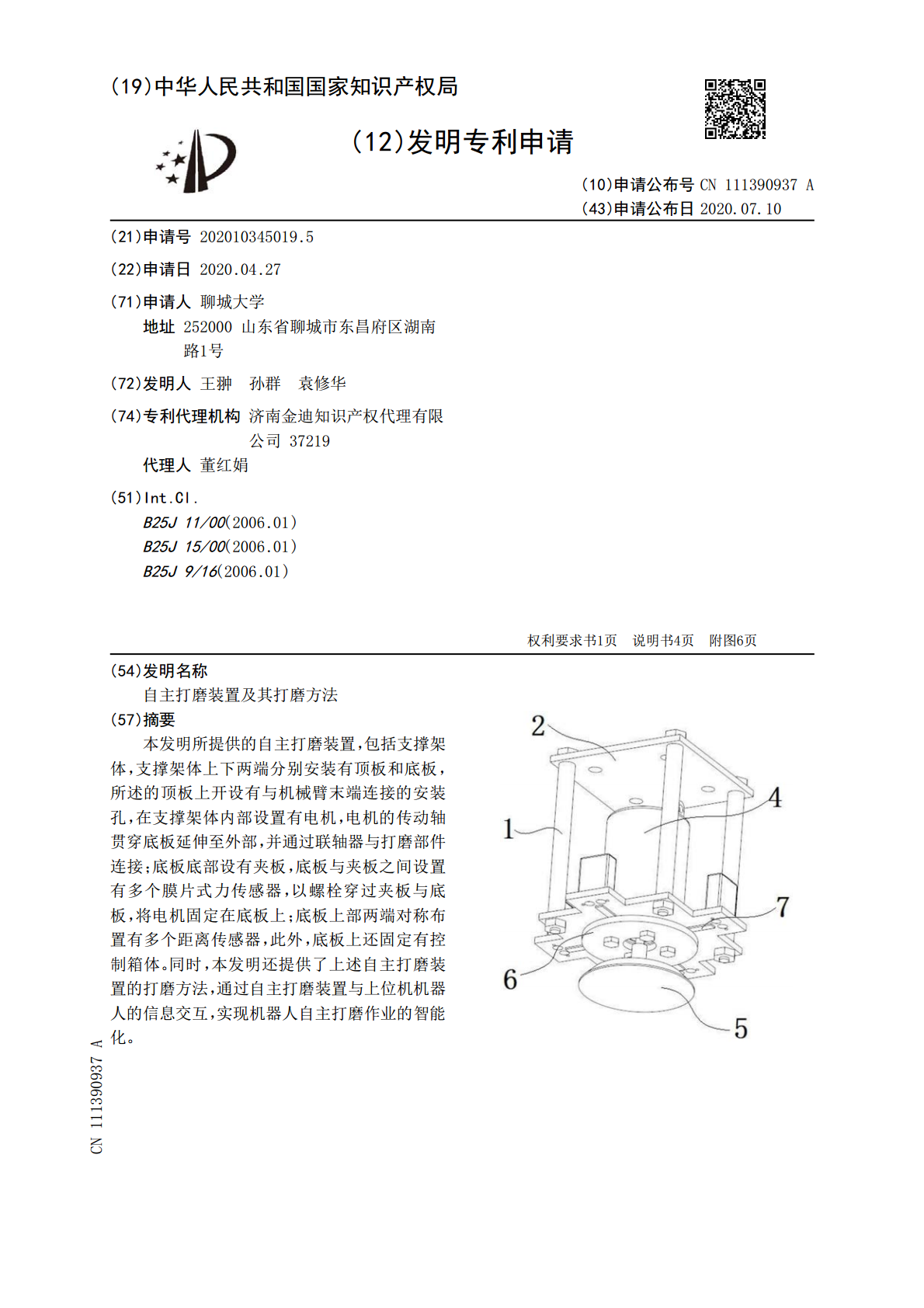
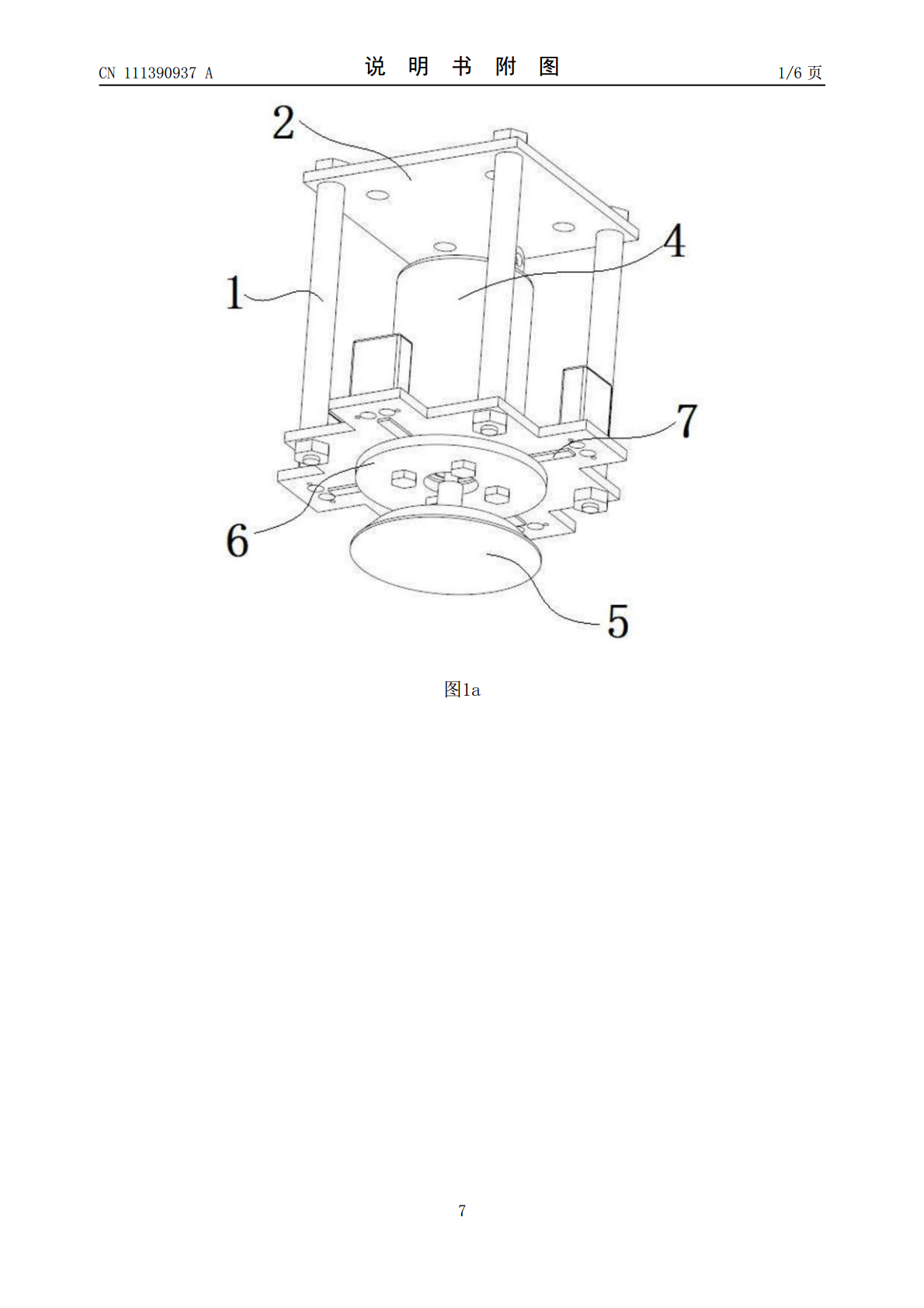
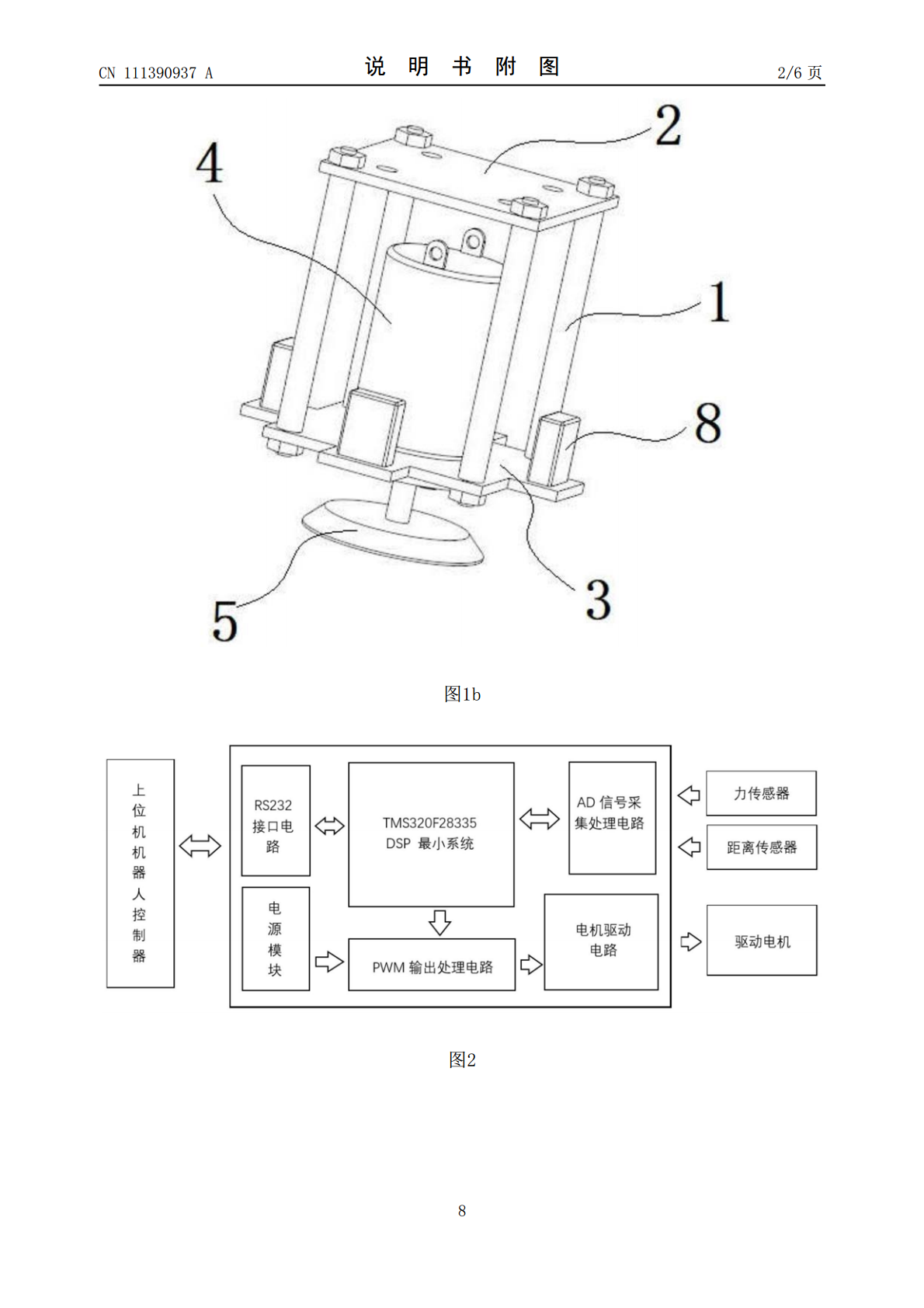
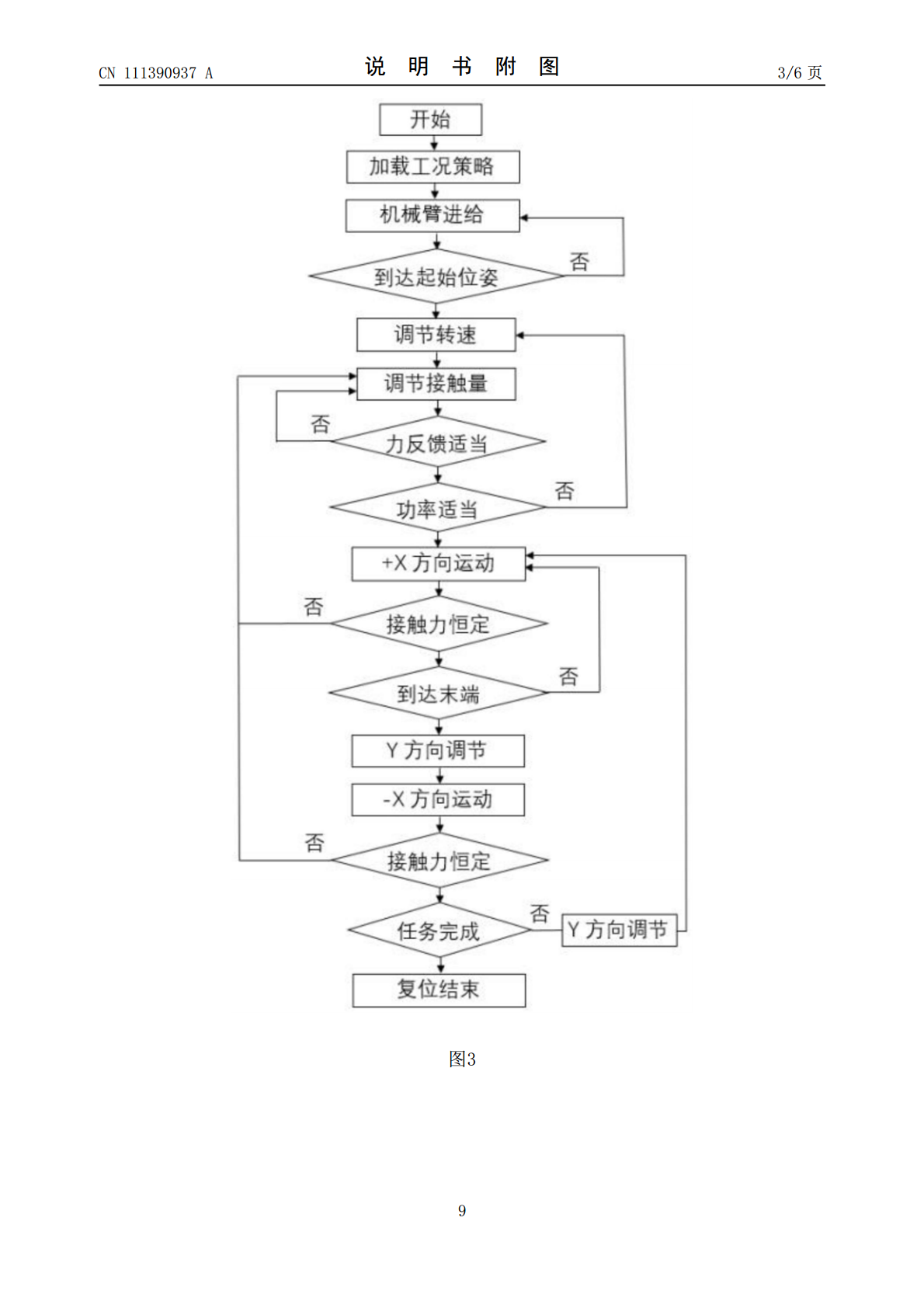
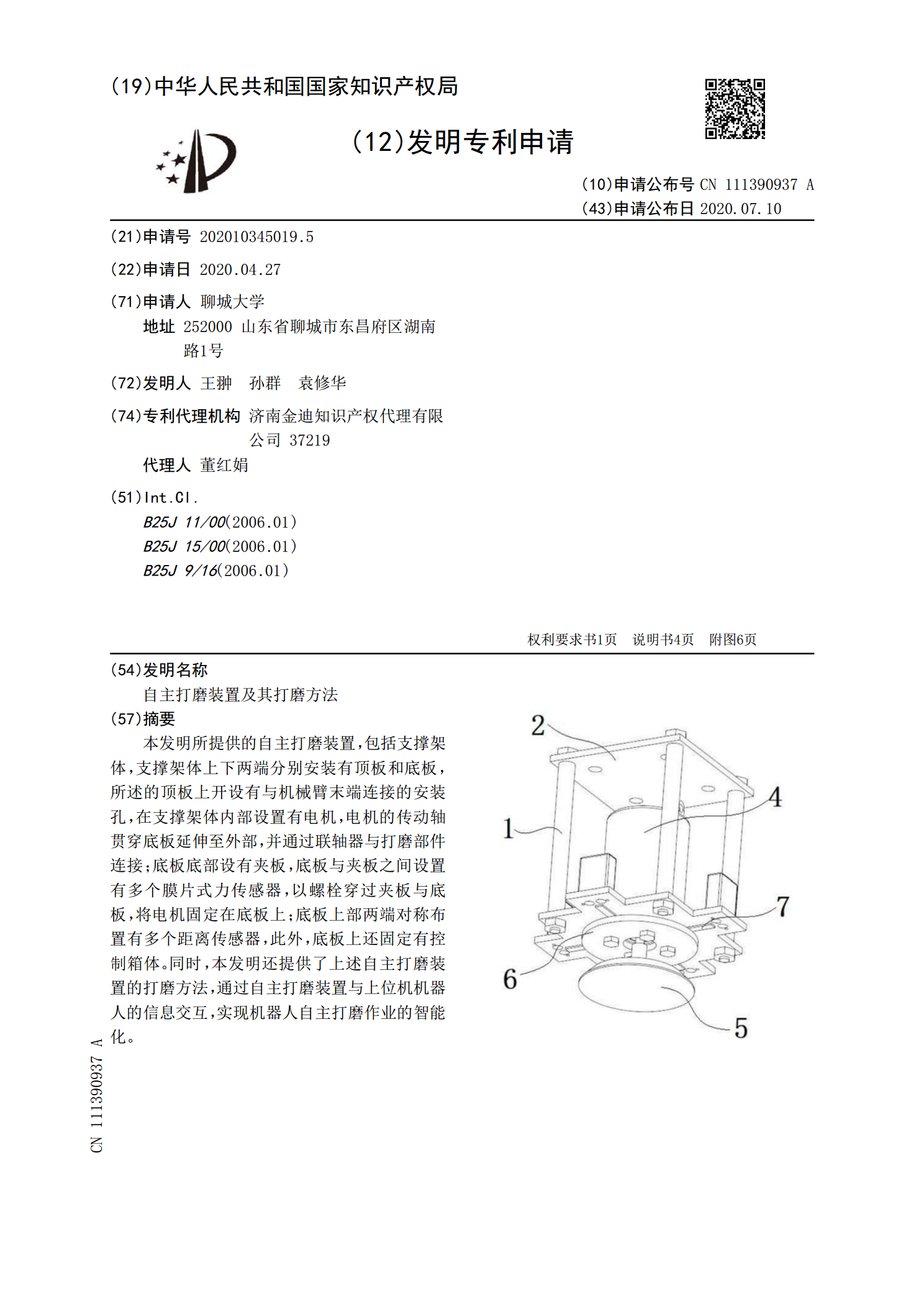
本发明所提供的自主打磨装置,包括支撑架体,支撑架体上下两端分别安装有顶板和底板,所述的顶板上开设有与机械臂末端连接的安装孔,在支撑架体内部设置有电机,电机的传动轴贯穿底板延伸至外部,并通过联轴器与打磨部件连接;底板底部设有夹板,底板与夹板之间设置有多个膜片式力传感器,以螺栓穿过夹板与底板,将电机固定在底板上;底板上部两端对称布置有多个距离传感器,此外,底板上还固定有控制箱体。同时,本发明还提供了上述自主打磨装置的打磨方法,通过自主打磨装置与上位机机器人的信息交互,实现机器人自主打磨作业的智能化。
墙面打磨装置及其打磨方法.pdf
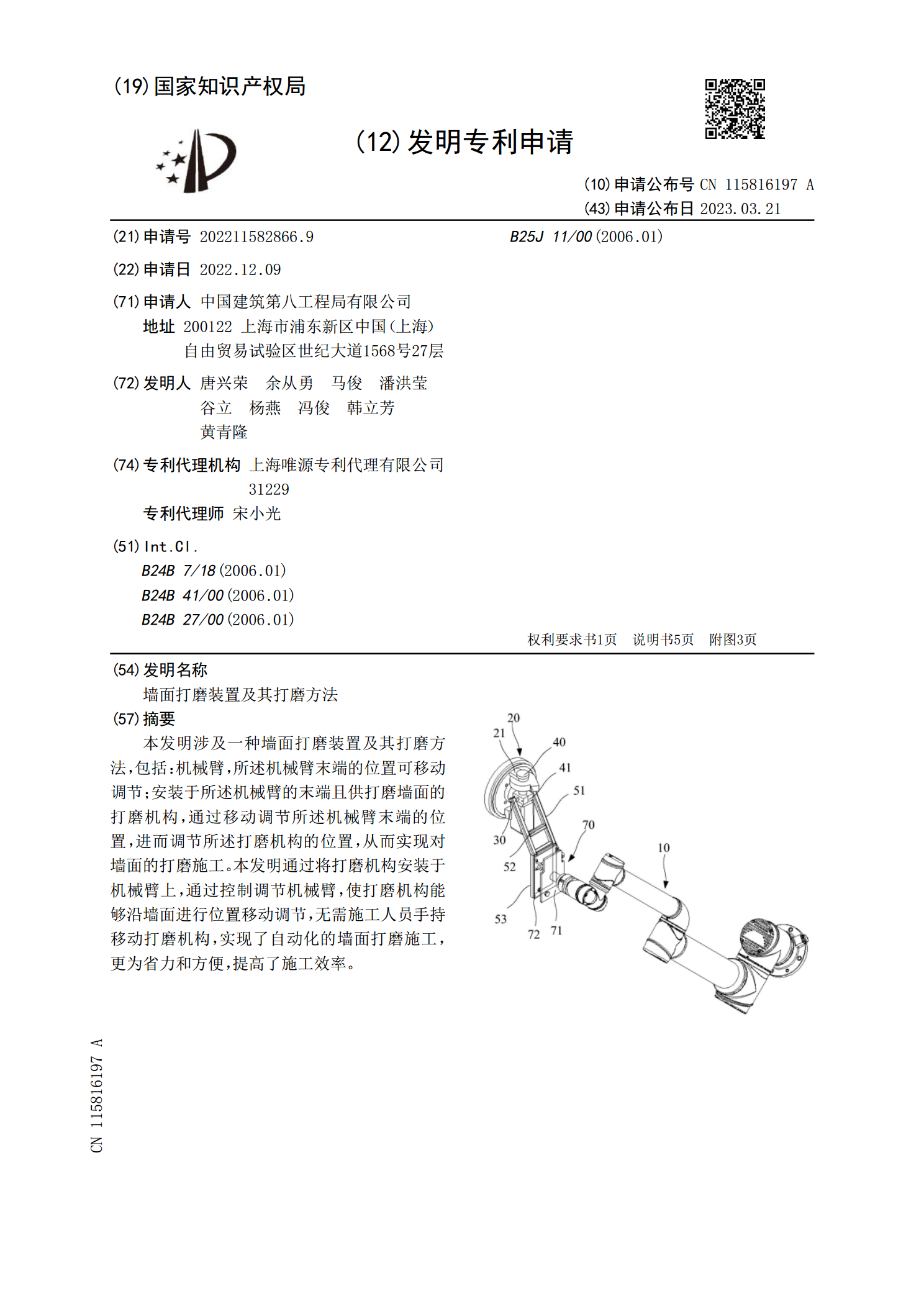
本发明涉及一种墙面打磨装置及其打磨方法,包括:机械臂,所述机械臂末端的位置可移动调节;安装于所述机械臂的末端且供打磨墙面的打磨机构,通过移动调节所述机械臂末端的位置,进而调节所述打磨机构的位置,从而实现对墙面的打磨施工。本发明通过将打磨机构安装于机械臂上,通过控制调节机械臂,使打磨机构能够沿墙面进行位置移动调节,无需施工人员手持移动打磨机构,实现了自动化的墙面打磨施工,更为省力和方便,提高了施工效率。

一种轮胎打磨装置及其打磨方法.pdf
本发明公开了一种轮胎打磨装置及其打磨方法,包括机架,所述机架包括连接成一体的平台机架和轮胎机架,所述平台机架上设置有十字平台,所述轮胎机架上夹持设置有轮胎,所述十字平台上可滑动设置有打磨装置,在打磨状态下,所述轮胎在轮胎机架上定点匀速转动,所述打磨装置的打磨端伸入轮胎内部,所述打磨端对轮胎的内壁做移动式的循环往复打磨动作。本发明公开了一种轮胎打磨装置及其打磨方法,能够实现对轮胎内壁的循环往复打磨,打磨充分,效率高。
一种工件打磨装置及其打磨方法.pdf
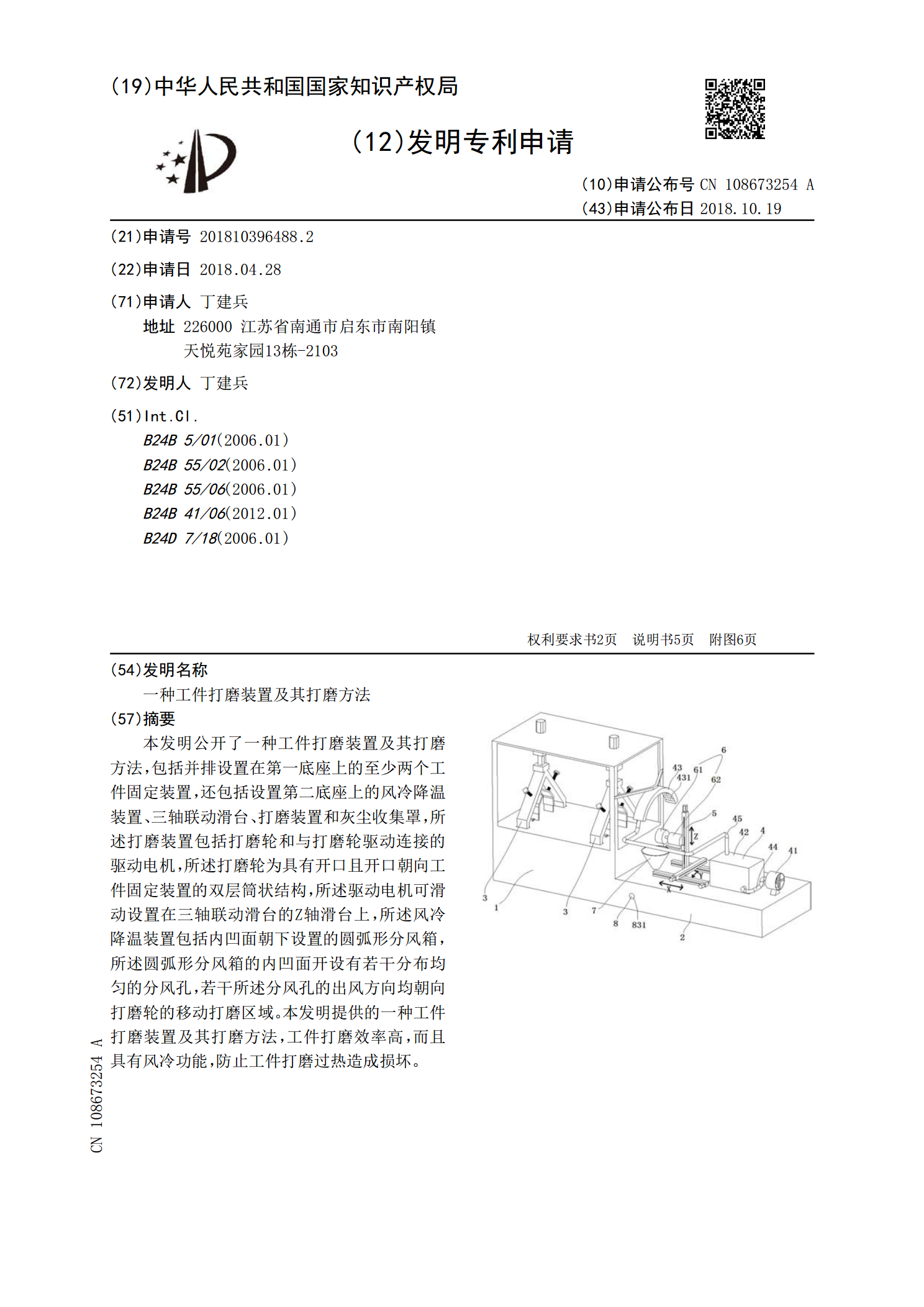
本发明公开了一种工件打磨装置及其打磨方法,包括并排设置在第一底座上的至少两个工件固定装置,还包括设置第二底座上的风冷降温装置、三轴联动滑台、打磨装置和灰尘收集罩,所述打磨装置包括打磨轮和与打磨轮驱动连接的驱动电机,所述打磨轮为具有开口且开口朝向工件固定装置的双层筒状结构,所述驱动电机可滑动设置在三轴联动滑台的Z轴滑台上,所述风冷降温装置包括内凹面朝下设置的圆弧形分风箱,所述圆弧形分风箱的内凹面开设有若干分布均匀的分风孔,若干所述分风孔的出风方向均朝向打磨轮的移动打磨区域。本发明提供的一种工件打磨装置及其打
一种基于轨道打磨作业的打磨作业装置及其打磨方法.pdf
本发明涉及铁轨打磨技术领域,具体公开一种基于轨道打磨作业的打磨作业装置及其打磨方法,该打磨作业装置包括:安装架、安装在安装架上的水平运动平台、安装在水平运动平台上的竖直运动平台、安装在竖直运动平台上的打磨作业装置旋转机构、动力机构,安装架的底部设置有两组用于带动安装架在轨道上行走的轨道行走轮,打磨作业装置旋转机构上设置有用于防止打磨作业装置在打磨过程中晃动的制动机构;本发明的优点是:对打磨作业装置旋转机构以及打磨作业装置进行改进,使得能够解决现有的打磨作业装置在打磨铁轨水平面以及轨道内接触面无法精确打磨的