
一种自动拆垛机.pdf

骊英****bb

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动拆垛机.pdf
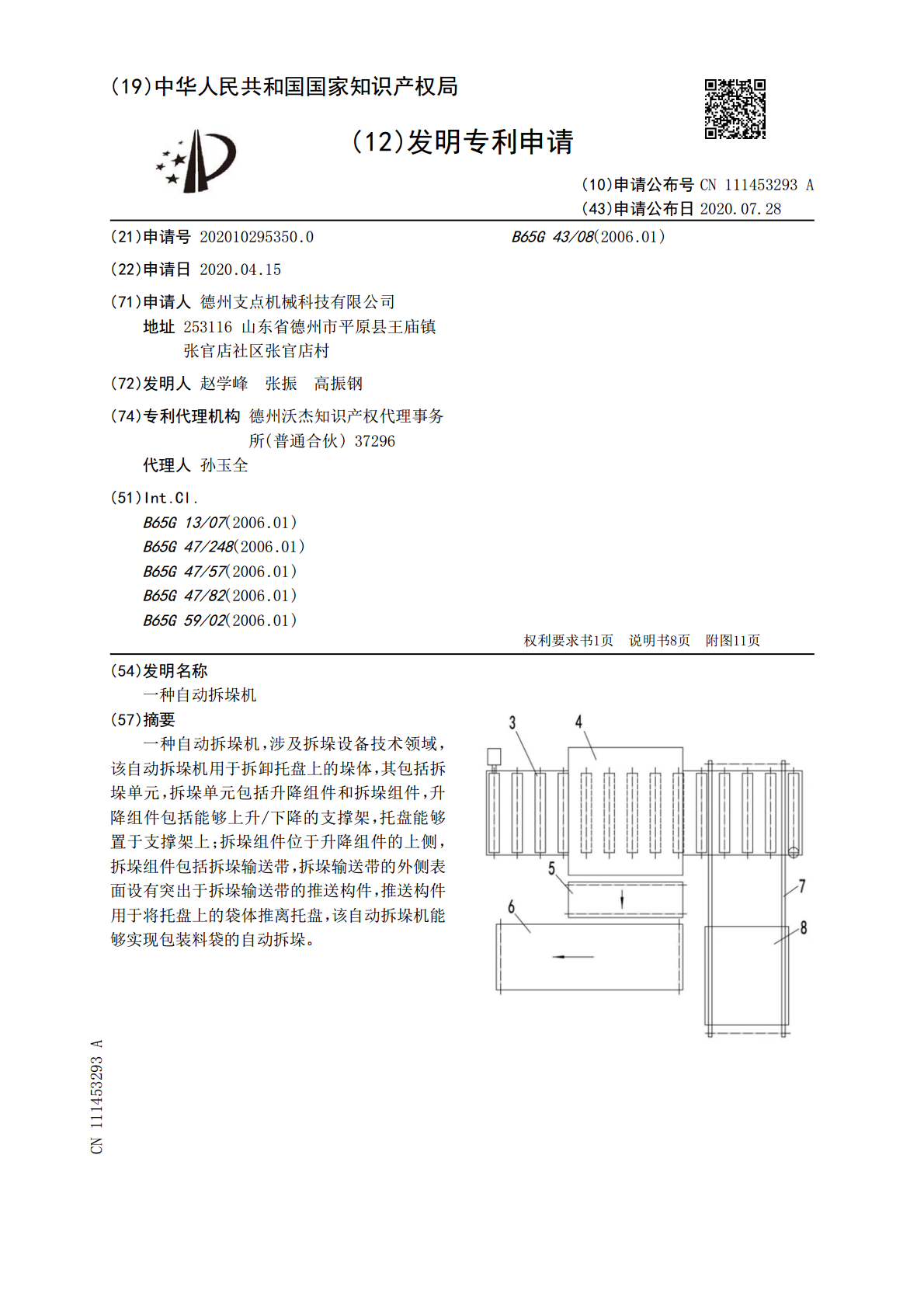
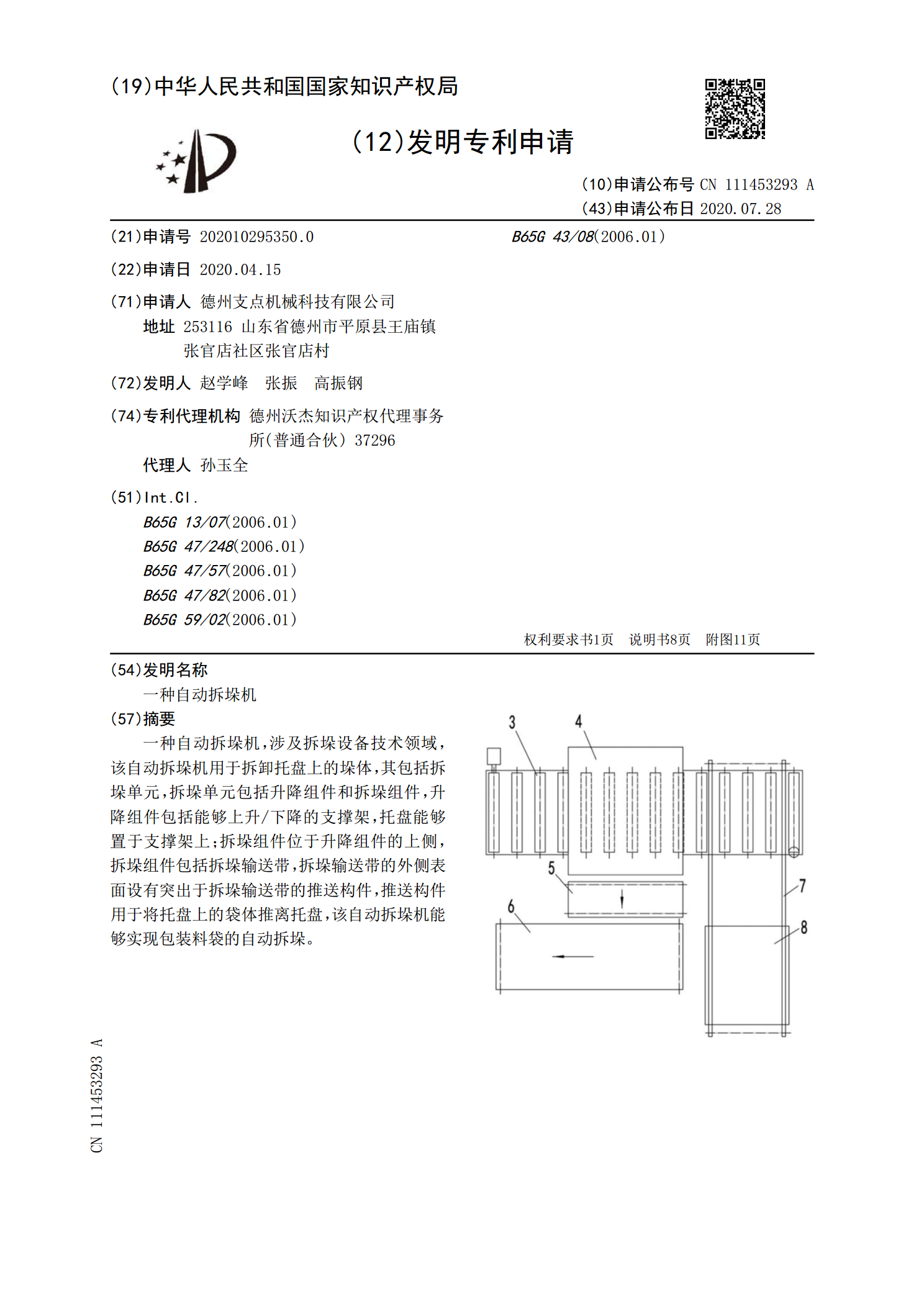
一种自动拆垛机,涉及拆垛设备技术领域,该自动拆垛机用于拆卸托盘上的垛体,其包括拆垛单元,拆垛单元包括升降组件和拆垛组件,升降组件包括能够上升/下降的支撑架,托盘能够置于支撑架上;拆垛组件位于升降组件的上侧,拆垛组件包括拆垛输送带,拆垛输送带的外侧表面设有突出于拆垛输送带的推送构件,推送构件用于将托盘上的袋体推离托盘,该自动拆垛机能够实现包装料袋的自动拆垛。
一种自动坐标式拆垛机.pdf
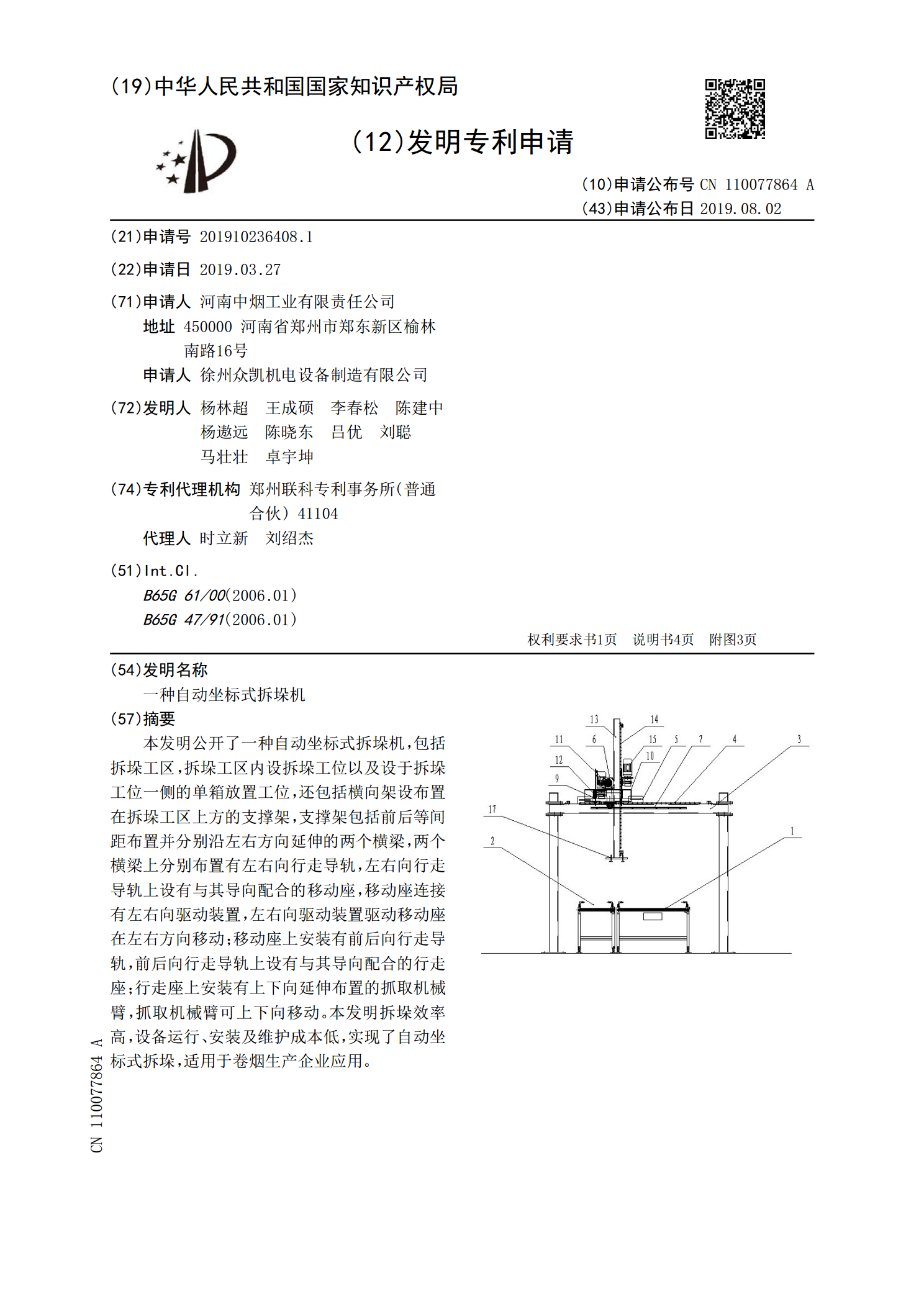
本发明公开了一种自动坐标式拆垛机,包括拆垛工区,拆垛工区内设拆垛工位以及设于拆垛工位一侧的单箱放置工位,还包括横向架设布置在拆垛工区上方的支撑架,支撑架包括前后等间距布置并分别沿左右方向延伸的两个横梁,两个横梁上分别布置有左右向行走导轨,左右向行走导轨上设有与其导向配合的移动座,移动座连接有左右向驱动装置,左右向驱动装置驱动移动座在左右方向移动;移动座上安装有前后向行走导轨,前后向行走导轨上设有与其导向配合的行走座;行走座上安装有上下向延伸布置的抓取机械臂,抓取机械臂可上下向移动。本发明拆垛效率高,设备运
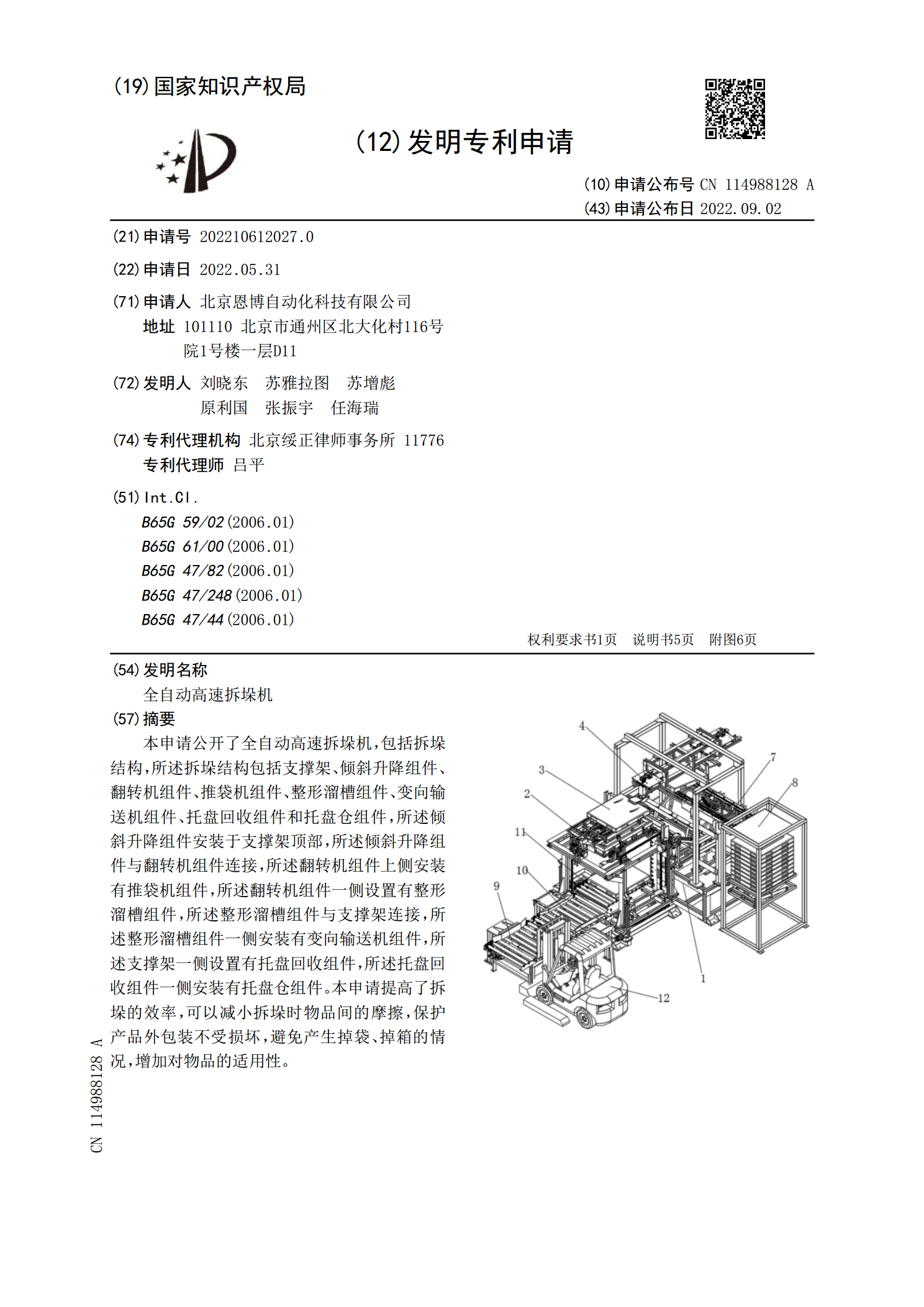
全自动高速拆垛机.pdf
本申请公开了全自动高速拆垛机,包括拆垛结构,所述拆垛结构包括支撑架、倾斜升降组件、翻转机组件、推袋机组件、整形溜槽组件、变向输送机组件、托盘回收组件和托盘仓组件,所述倾斜升降组件安装于支撑架顶部,所述倾斜升降组件与翻转机组件连接,所述翻转机组件上侧安装有推袋机组件,所述翻转机组件一侧设置有整形溜槽组件,所述整形溜槽组件与支撑架连接,所述整形溜槽组件一侧安装有变向输送机组件,所述支撑架一侧设置有托盘回收组件,所述托盘回收组件一侧安装有托盘仓组件。本申请提高了拆垛的效率,可以减小拆垛时物品间的摩擦,保护产品外
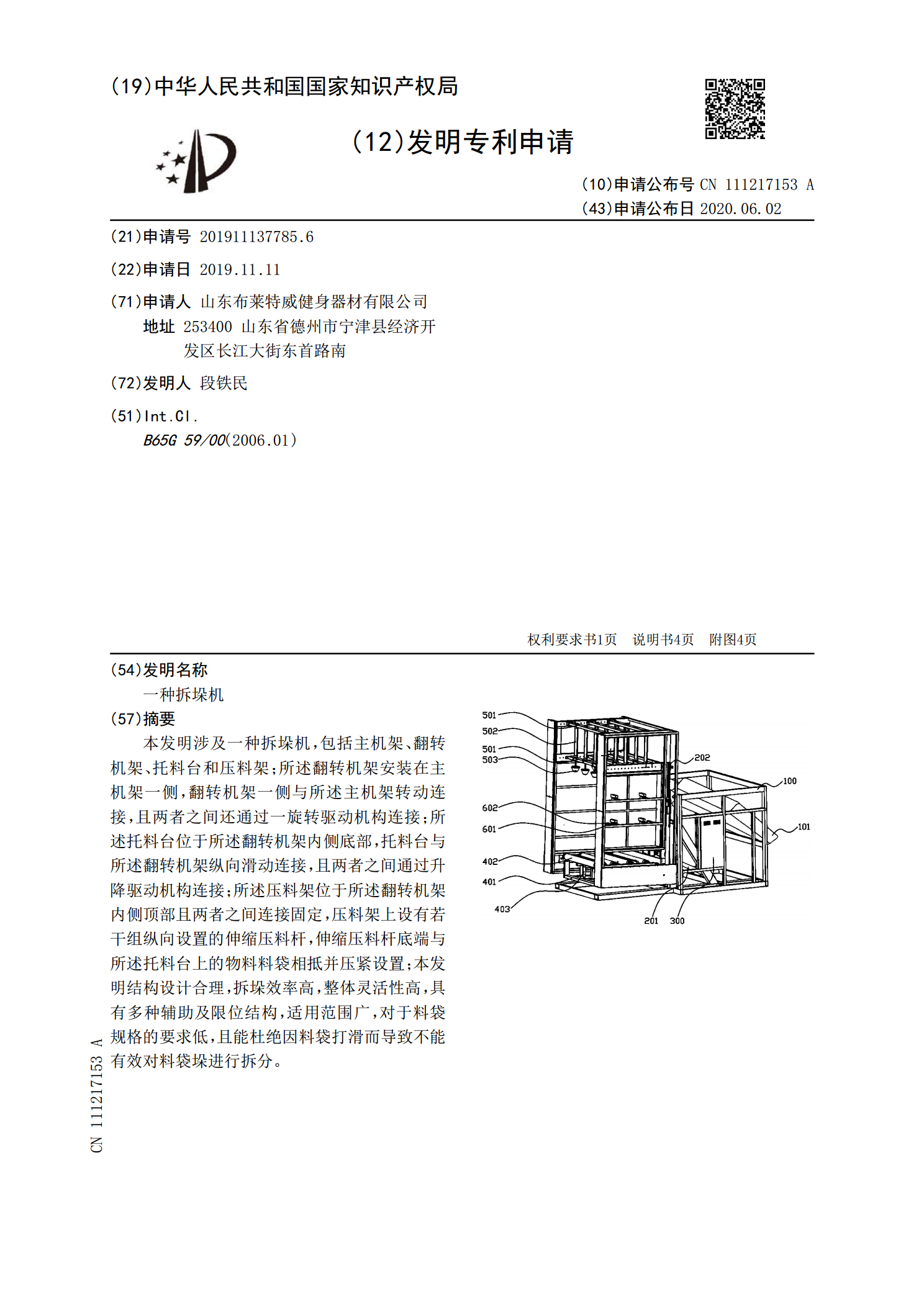
一种拆垛机.pdf
本发明涉及一种拆垛机,包括主机架、翻转机架、托料台和压料架;所述翻转机架安装在主机架一侧,翻转机架一侧与所述主机架转动连接,且两者之间还通过一旋转驱动机构连接;所述托料台位于所述翻转机架内侧底部,托料台与所述翻转机架纵向滑动连接,且两者之间通过升降驱动机构连接;所述压料架位于所述翻转机架内侧顶部且两者之间连接固定,压料架上设有若干组纵向设置的伸缩压料杆,伸缩压料杆底端与所述托料台上的物料料袋相抵并压紧设置;本发明结构设计合理,拆垛效率高,整体灵活性高,具有多种辅助及限位结构,适用范围广,对于料袋规格的要求
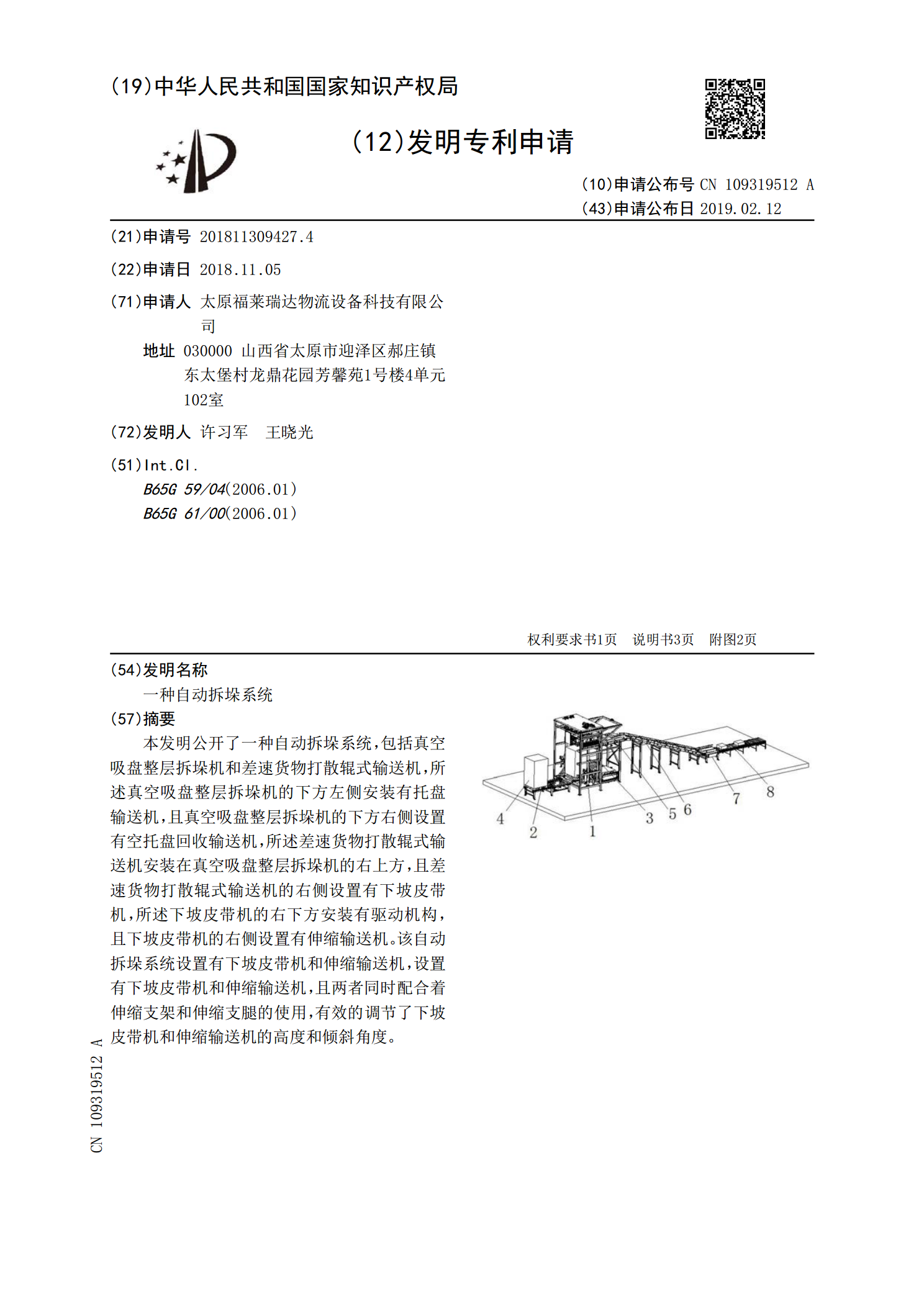
一种自动拆垛系统.pdf
本发明公开了一种自动拆垛系统,包括真空吸盘整层拆垛机和差速货物打散辊式输送机,所述真空吸盘整层拆垛机的下方左侧安装有托盘输送机,且真空吸盘整层拆垛机的下方右侧设置有空托盘回收输送机,所述差速货物打散辊式输送机安装在真空吸盘整层拆垛机的右上方,且差速货物打散辊式输送机的右侧设置有下坡皮带机,所述下坡皮带机的右下方安装有驱动机构,且下坡皮带机的右侧设置有伸缩输送机。该自动拆垛系统设置有下坡皮带机和伸缩输送机,设置有下坡皮带机和伸缩输送机,且两者同时配合着伸缩支架和伸缩支腿的使用,有效的调节了下坡皮带机和伸缩输