
无人机避障方法及系统、无人机集群避障方法及系统.pdf

努力****妙风

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人机避障方法及系统、无人机集群避障方法及系统.pdf
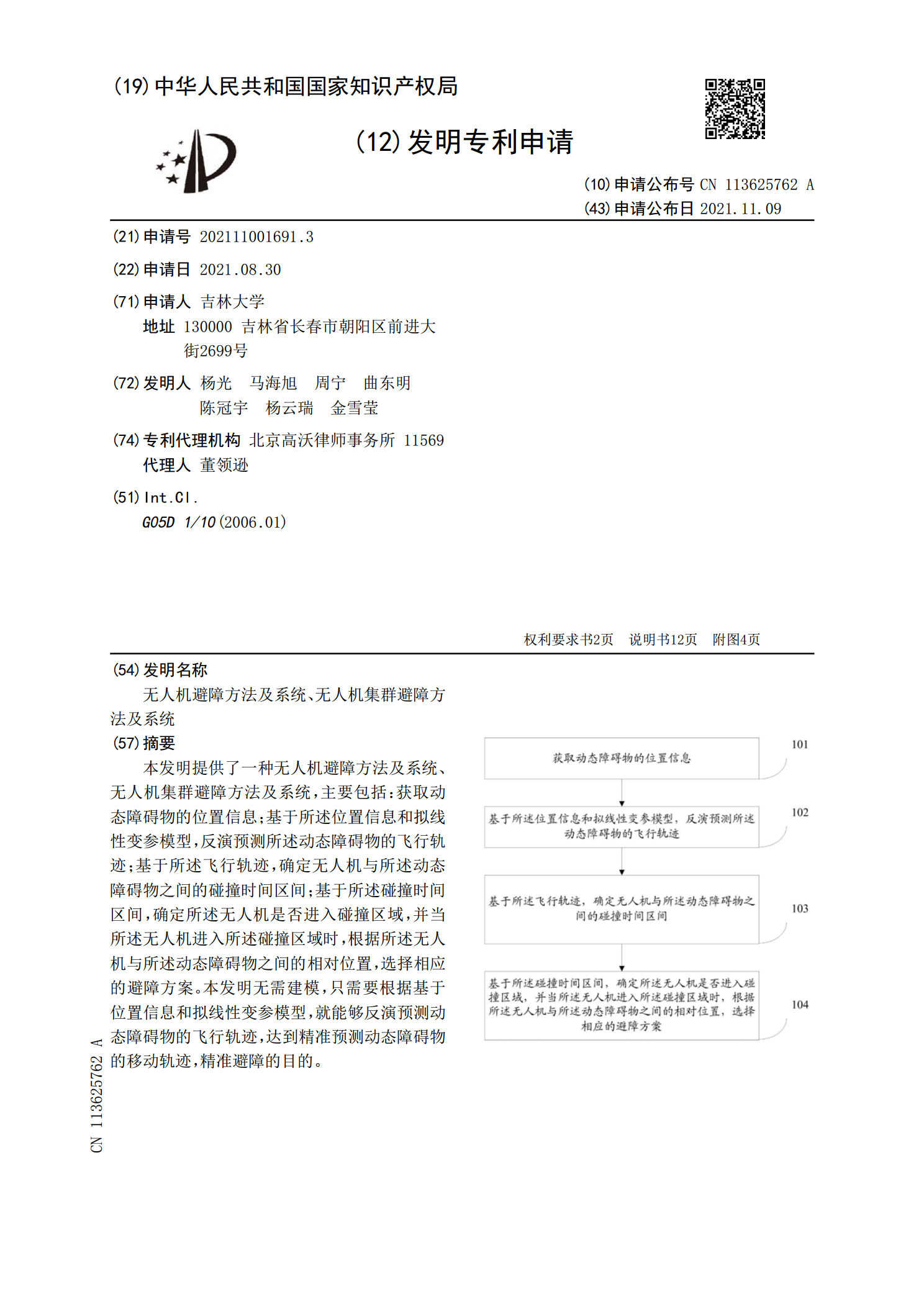
本发明提供了一种无人机避障方法及系统、无人机集群避障方法及系统,主要包括:获取动态障碍物的位置信息;基于所述位置信息和拟线性变参模型,反演预测所述动态障碍物的飞行轨迹;基于所述飞行轨迹,确定无人机与所述动态障碍物之间的碰撞时间区间;基于所述碰撞时间区间,确定所述无人机是否进入碰撞区域,并当所述无人机进入所述碰撞区域时,根据所述无人机与所述动态障碍物之间的相对位置,选择相应的避障方案。本发明无需建模,只需要根据基于位置信息和拟线性变参模型,就能够反演预测动态障碍物的飞行轨迹,达到精准预测动态障碍物的移动轨迹
一种无人机避障系统及避障方法.pdf
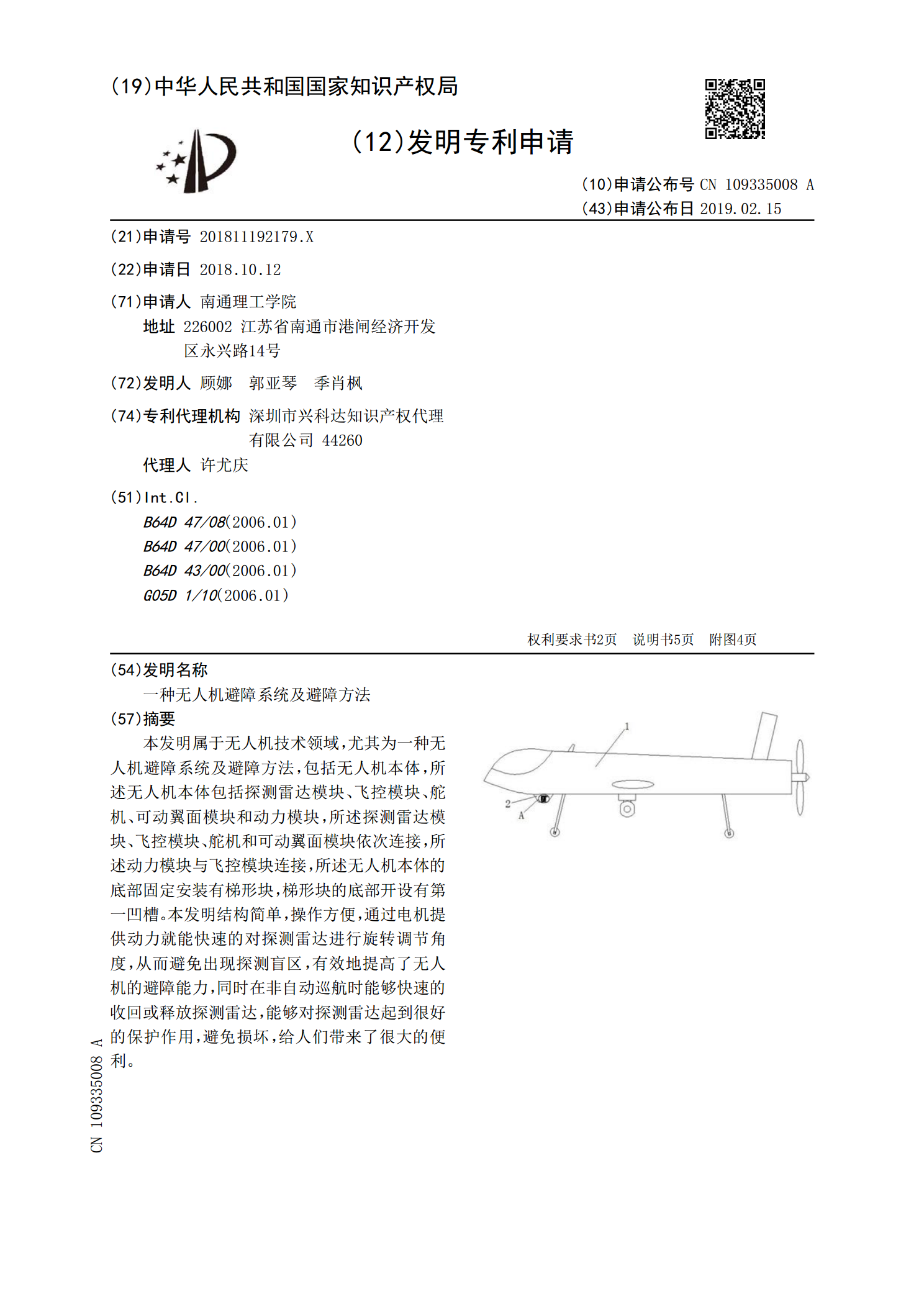
本发明属于无人机技术领域,尤其为一种无人机避障系统及避障方法,包括无人机本体,所述无人机本体包括探测雷达模块、飞控模块、舵机、可动翼面模块和动力模块,所述探测雷达模块、飞控模块、舵机和可动翼面模块依次连接,所述动力模块与飞控模块连接,所述无人机本体的底部固定安装有梯形块,梯形块的底部开设有第一凹槽。本发明结构简单,操作方便,通过电机提供动力就能快速的对探测雷达进行旋转调节角度,从而避免出现探测盲区,有效地提高了无人机的避障能力,同时在非自动巡航时能够快速的收回或释放探测雷达,能够对探测雷达起到很好的保护作
仿载波监听机制的无人机集群避障系统及其方法.pdf
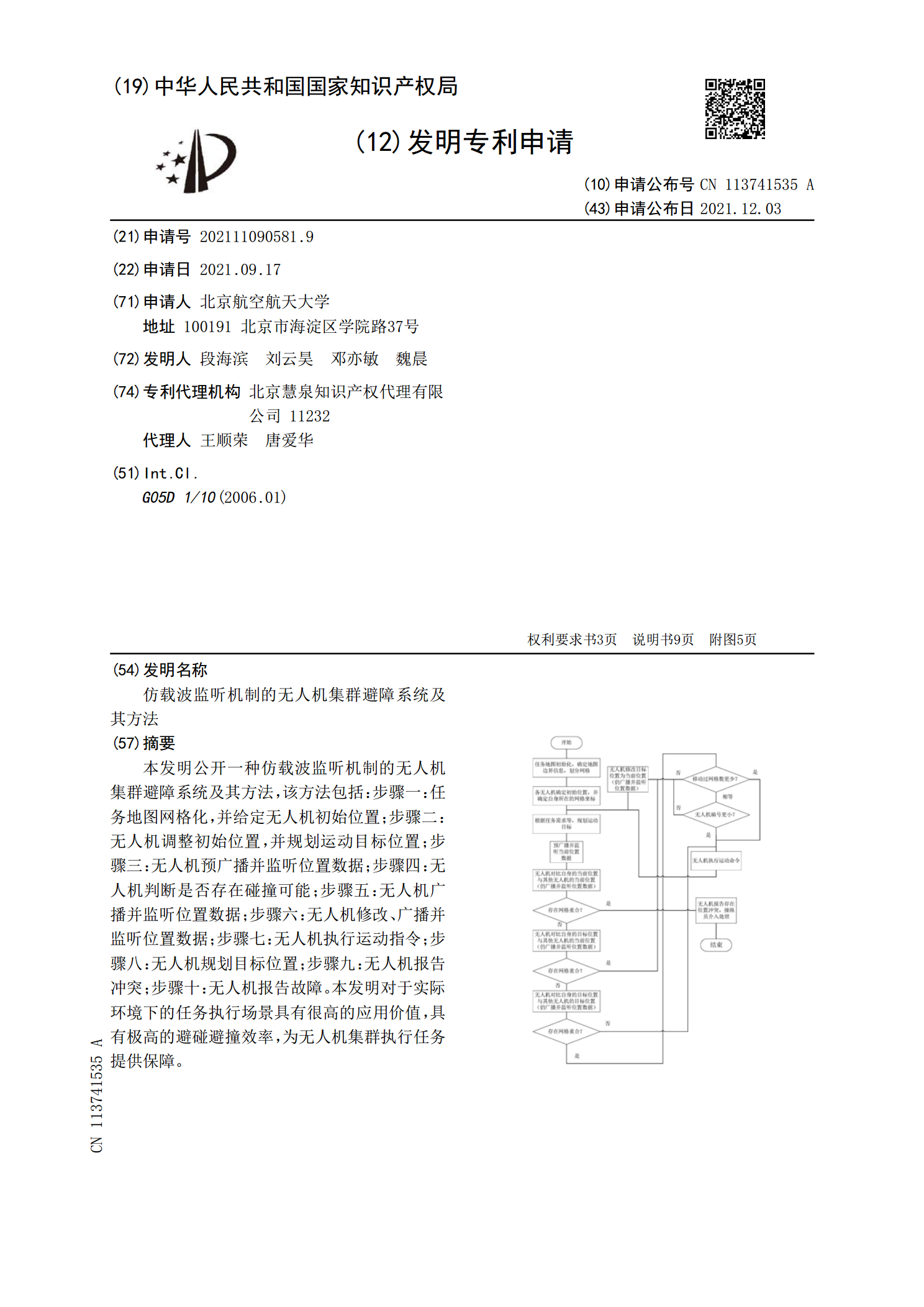
本发明公开一种仿载波监听机制的无人机集群避障系统及其方法,该方法包括:步骤一:任务地图网格化,并给定无人机初始位置;步骤二:无人机调整初始位置,并规划运动目标位置;步骤三:无人机预广播并监听位置数据;步骤四:无人机判断是否存在碰撞可能;步骤五:无人机广播并监听位置数据;步骤六:无人机修改、广播并监听位置数据;步骤七:无人机执行运动指令;步骤八:无人机规划目标位置;步骤九:无人机报告冲突;步骤十:无人机报告故障。本发明对于实际环境下的任务执行场景具有很高的应用价值,具有极高的避碰避撞效率,为无人机集群执行任
机械臂的避障方法及避障系统.pdf
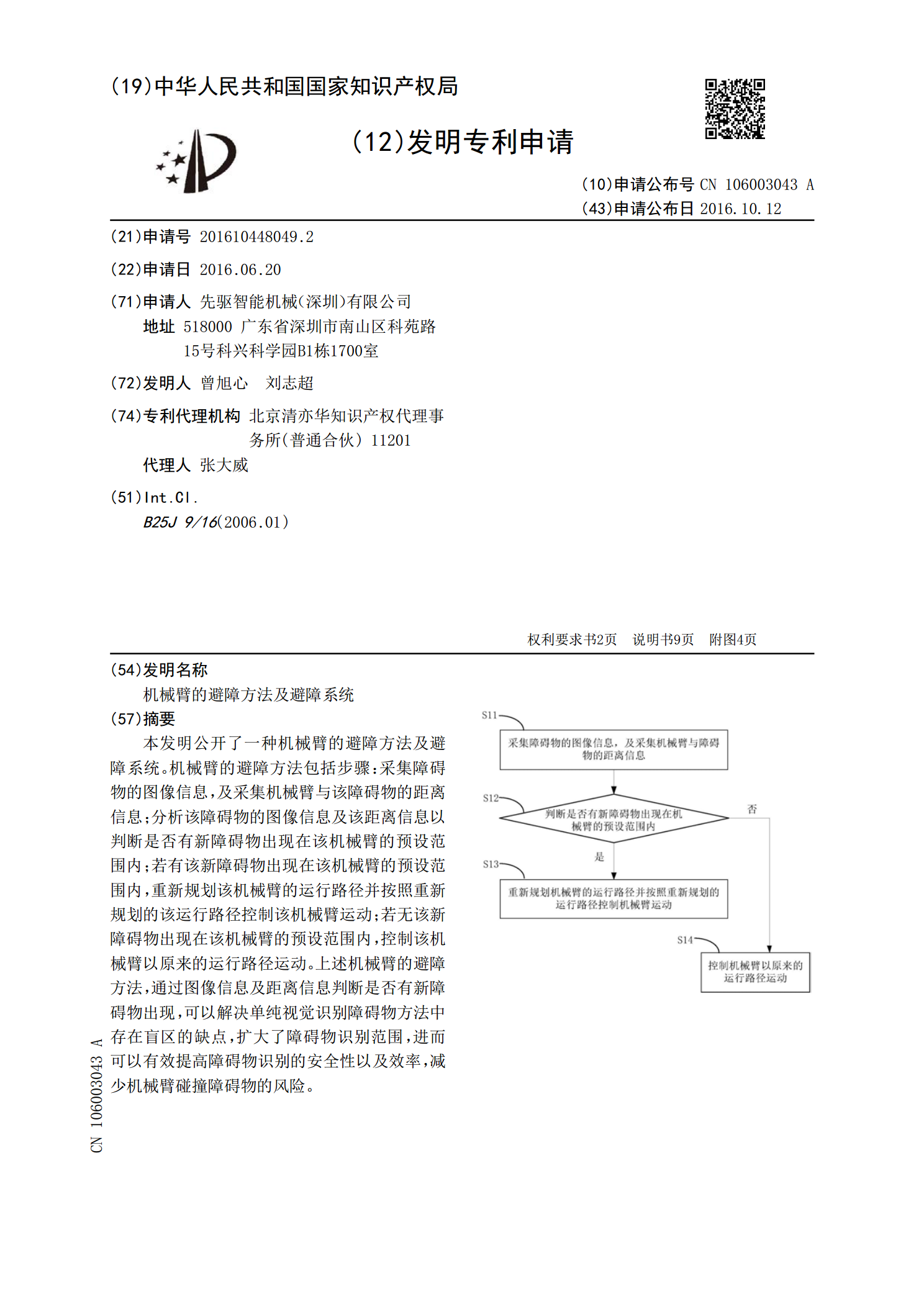
本发明公开了一种机械臂的避障方法及避障系统。机械臂的避障方法包括步骤:采集障碍物的图像信息,及采集机械臂与该障碍物的距离信息;分析该障碍物的图像信息及该距离信息以判断是否有新障碍物出现在该机械臂的预设范围内;若有该新障碍物出现在该机械臂的预设范围内,重新规划该机械臂的运行路径并按照重新规划的该运行路径控制该机械臂运动;若无该新障碍物出现在该机械臂的预设范围内,控制该机械臂以原来的运行路径运动。上述机械臂的避障方法,通过图像信息及距离信息判断是否有新障碍物出现,可以解决单纯视觉识别障碍物方法中存在盲区的缺点

基于无人机的防撞避障系统.pdf
本实用新型提供的基于无人机的防撞避障系统,线性调频源提供非对称三角波作为发射信号,有效减小接收链路的系统带宽,提高接收链路的灵敏度,降低接收链路的噪声系数,平衡混频器产生的差拍信号经中频放大后由FFT数字处理器转换到频域进行分析,能避免时域混叠,模值器对数据进行求模处理,提高数据处理速度,非相参积累器对各个信号幅度进行非相参积累,提高弱信号的信噪比,恒虚警检测器在混有杂波干扰的目标信号中以最大概率检测出障碍物的距离信号,提高准确率,本实用新型从信号源的发射到差拍信号的处理均进行了优化,为无人机提供准确的与