
一种多传感器融合的无人车探测避障系统及避障方法.pdf

一吃****继勇

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多传感器融合的无人车探测避障系统及避障方法.pdf
本发明提供了一种多传感器融合的无人车探测避障系统及避障方法,该避障系统包括多个单线激光雷达、双CCD摄像机、微波雷达、前后方盲区超声波传感器组和基于ARM+FPGA+NUC的三核控制器;多个单线激光雷达信号处理由NUC微型电脑处理,CCD摄像机的双目视觉图形数据由ARM+FPGA控制器共同处理,而盲区探测和避障、人机界面、路径规划、在线输出等功能交给STM32F767单独完成,ARM+FPGA控制器通过解码输出控制信号精确控制直流无刷伺服电机,驱动无人车行驶。本发明使得无人车可以全天候较远地发现复杂环境下
一种无人机避障系统及避障方法.pdf
本发明属于无人机技术领域,尤其为一种无人机避障系统及避障方法,包括无人机本体,所述无人机本体包括探测雷达模块、飞控模块、舵机、可动翼面模块和动力模块,所述探测雷达模块、飞控模块、舵机和可动翼面模块依次连接,所述动力模块与飞控模块连接,所述无人机本体的底部固定安装有梯形块,梯形块的底部开设有第一凹槽。本发明结构简单,操作方便,通过电机提供动力就能快速的对探测雷达进行旋转调节角度,从而避免出现探测盲区,有效地提高了无人机的避障能力,同时在非自动巡航时能够快速的收回或释放探测雷达,能够对探测雷达起到很好的保护作
基于多传感器数据融合的无人车避障导航研究.docx
基于多传感器数据融合的无人车避障导航研究一、内容描述《基于多传感器数据融合的无人车避障导航研究》一文旨在探讨如何利用多传感器数据融合技术来提升无人车避障导航的性能和准确性。随着无人驾驶技术的快速发展,无人车在各种场景中的应用日益广泛,而避障导航作为无人驾驶技术的核心组成部分,其性能直接关系到无人车的安全性和稳定性。本文的研究具有重要的理论价值和实践意义。文章首先介绍了多传感器数据融合的基本原理和方法,包括常见的传感器类型、数据融合算法以及融合策略等。文章详细分析了无人车避障导航的需求和挑战,包括复杂多变的
无人机避障方法及系统、无人机集群避障方法及系统.pdf
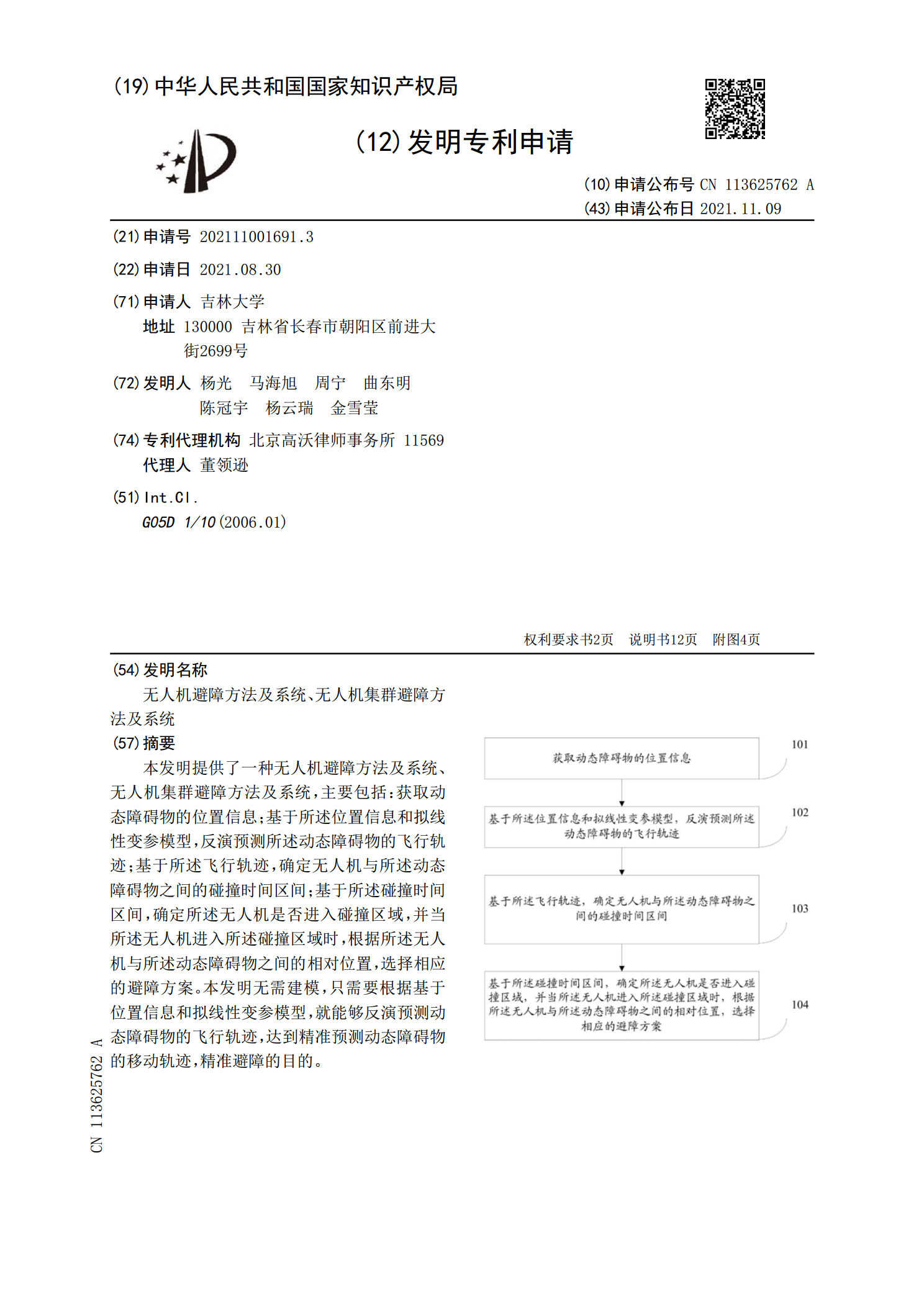
本发明提供了一种无人机避障方法及系统、无人机集群避障方法及系统,主要包括:获取动态障碍物的位置信息;基于所述位置信息和拟线性变参模型,反演预测所述动态障碍物的飞行轨迹;基于所述飞行轨迹,确定无人机与所述动态障碍物之间的碰撞时间区间;基于所述碰撞时间区间,确定所述无人机是否进入碰撞区域,并当所述无人机进入所述碰撞区域时,根据所述无人机与所述动态障碍物之间的相对位置,选择相应的避障方案。本发明无需建模,只需要根据基于位置信息和拟线性变参模型,就能够反演预测动态障碍物的飞行轨迹,达到精准预测动态障碍物的移动轨迹
一种避障系统及避障方法.pdf
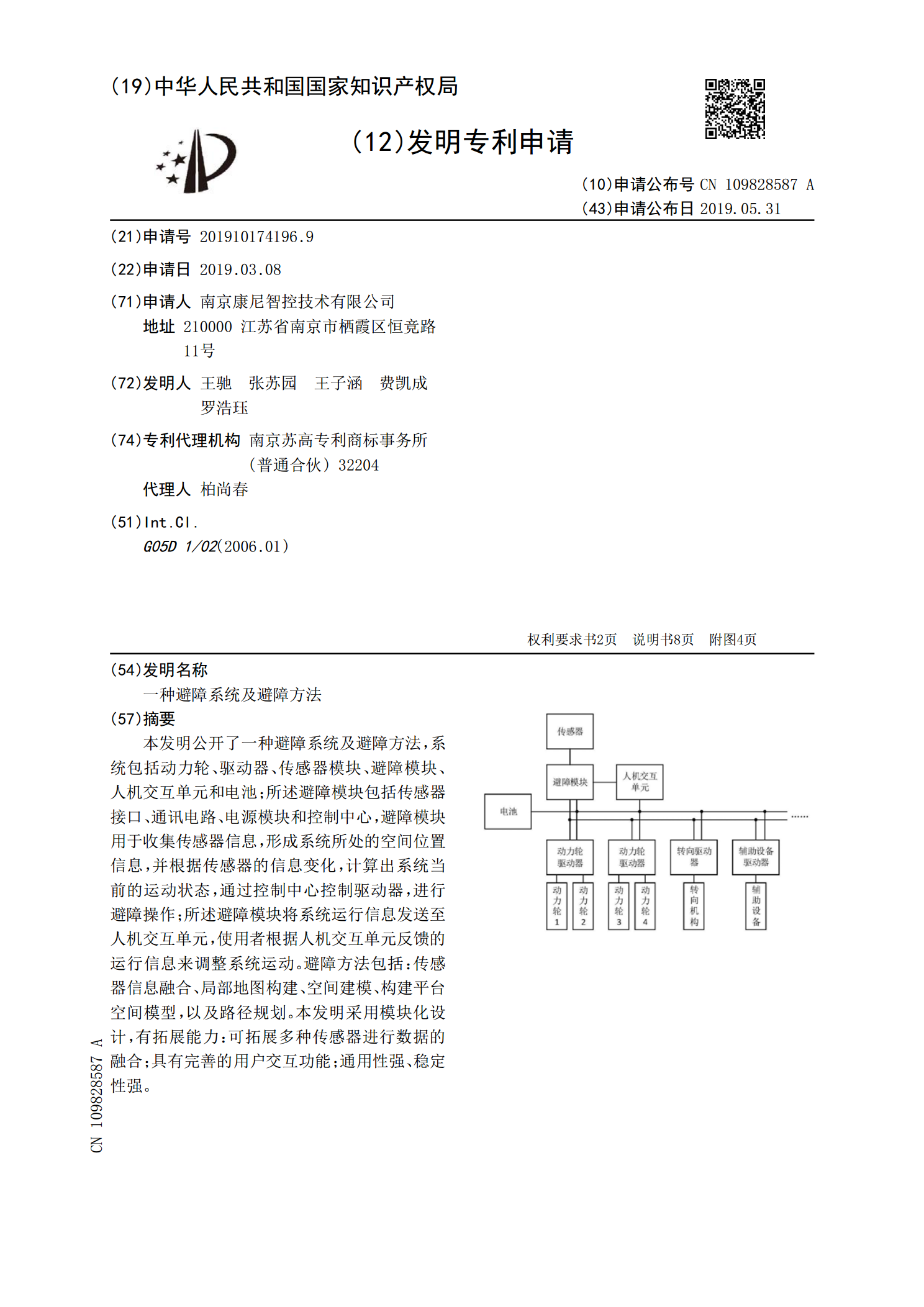
本发明公开了一种避障系统及避障方法,系统包括动力轮、驱动器、传感器模块、避障模块、人机交互单元和电池;所述避障模块包括传感器接口、通讯电路、电源模块和控制中心,避障模块用于收集传感器信息,形成系统所处的空间位置信息,并根据传感器的信息变化,计算出系统当前的运动状态,通过控制中心控制驱动器,进行避障操作;所述避障模块将系统运行信息发送至人机交互单元,使用者根据人机交互单元反馈的运行信息来调整系统运动。避障方法包括:传感器信息融合、局部地图构建、空间建模、构建平台空间模型,以及路径规划。本发明采用模块化设计,