
一种基于盲道识别的机器狗导盲运动控制方法.pdf

书生****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于盲道识别的机器狗导盲运动控制方法.pdf
本发明公开了一种基于盲道识别的机器狗导盲运动控制方法,包括:机器狗的鱼眼相机获取盲道的鱼眼图像,鱼眼图像校正模块进行鱼眼图像校正,得到正常镜头下的图像;对正常镜头下的图像依次进行灰度化、二值化及腐蚀处理后,提取图像中盲道的轮廓并确定图像中盲道中心点;计算盲道中心点与图像中心点构成的像素差向量,基于比例‑积分‑微分控制器的机器狗导盲运动控制模块根据所述像素差向量,实时发布机器狗沿着盲道运动的转向速度指令。本发明适用于机器狗持续沿盲道运动,可提高机器狗对盲道的感知能力,从而进一步提高机器狗导盲的安全性。
导盲机器狗.pdf
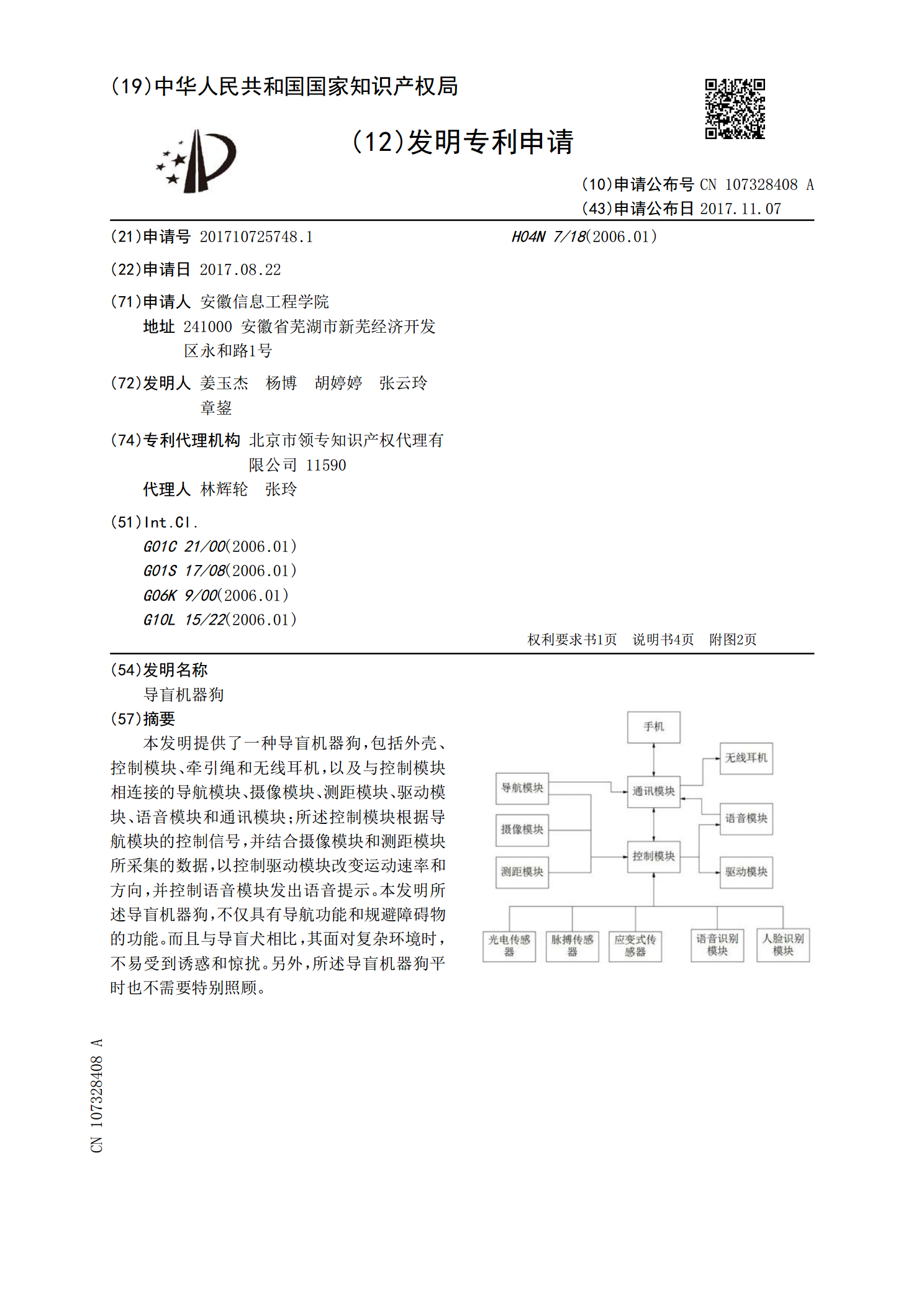
本发明提供了一种导盲机器狗,包括外壳、控制模块、牵引绳和无线耳机,以及与控制模块相连接的导航模块、摄像模块、测距模块、驱动模块、语音模块和通讯模块;所述控制模块根据导航模块的控制信号,并结合摄像模块和测距模块所采集的数据,以控制驱动模块改变运动速率和方向,并控制语音模块发出语音提示。本发明所述导盲机器狗,不仅具有导航功能和规避障碍物的功能。而且与导盲犬相比,其面对复杂环境时,不易受到诱惑和惊扰。另外,所述导盲机器狗平时也不需要特别照顾。

一种由机器狗导盲的方法及机器狗控制系统.pdf
本发明公开了一种由机器狗导盲的方法及机器狗控制系统,涉及机器人技术领域。一种由机器狗导盲的方法,包括以下步骤:接收用户发出的语音唤醒信号后应答用户,通过摄像头获取用户的位置信息以及通过雷达测量当前空间信息,构建当前空间的地图,并规划出到达用户所在位置的路线,按照到达用户所在位置的路线移动至用户身边;接收用户发出的目标位置信息,根据目标位置信息规划出目的地路线;依据目的地路线行走,并通过语音实时指引用户到达目的地。在本发明中,通过采用语音唤醒,实现尽管机器狗不在用户附近仍能启动机器狗,同时,通过自动追踪用户
一种导盲机器人的控制方法及导盲机器人.pdf
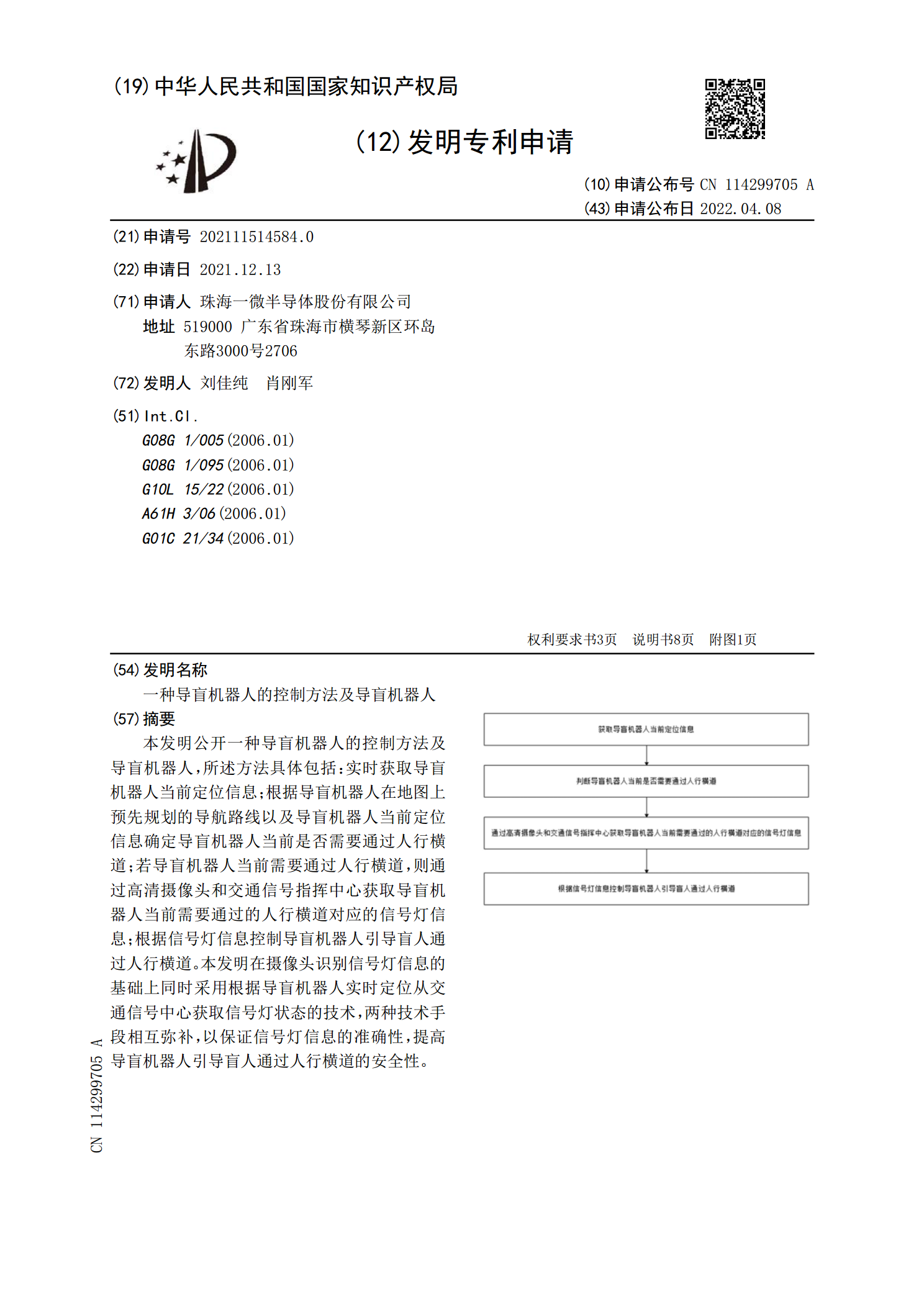
本发明公开一种导盲机器人的控制方法及导盲机器人,所述方法具体包括:实时获取导盲机器人当前定位信息;根据导盲机器人在地图上预先规划的导航路线以及导盲机器人当前定位信息确定导盲机器人当前是否需要通过人行横道;若导盲机器人当前需要通过人行横道,则通过高清摄像头和交通信号指挥中心获取导盲机器人当前需要通过的人行横道对应的信号灯信息;根据信号灯信息控制导盲机器人引导盲人通过人行横道。本发明在摄像头识别信号灯信息的基础上同时采用根据导盲机器人实时定位从交通信号中心获取信号灯状态的技术,两种技术手段相互弥补,以保证信号
一种导盲机器人及导盲系统、导盲方法.pdf
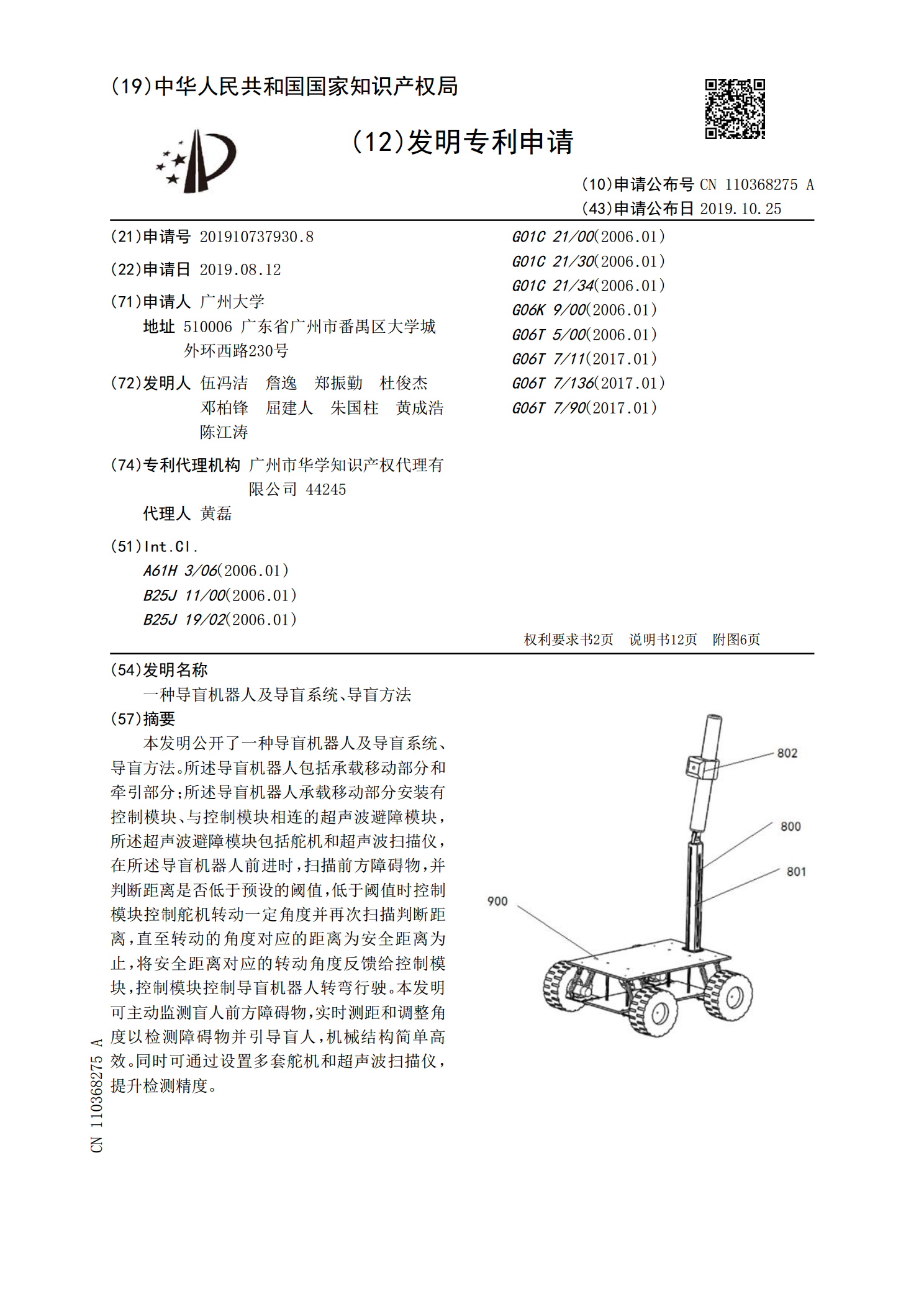
本发明公开了一种导盲机器人及导盲系统、导盲方法。所述导盲机器人包括承载移动部分和牵引部分;所述导盲机器人承载移动部分安装有控制模块、与控制模块相连的超声波避障模块,所述超声波避障模块包括舵机和超声波扫描仪,在所述导盲机器人前进时,扫描前方障碍物,并判断距离是否低于预设的阈值,低于阈值时控制模块控制舵机转动一定角度并再次扫描判断距离,直至转动的角度对应的距离为安全距离为止,将安全距离对应的转动角度反馈给控制模块,控制模块控制导盲机器人转弯行驶。本发明可主动监测盲人前方障碍物,实时测距和调整角度以检测障碍物并