
一种由机器狗导盲的方法及机器狗控制系统.pdf

俊英****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种由机器狗导盲的方法及机器狗控制系统.pdf
本发明公开了一种由机器狗导盲的方法及机器狗控制系统,涉及机器人技术领域。一种由机器狗导盲的方法,包括以下步骤:接收用户发出的语音唤醒信号后应答用户,通过摄像头获取用户的位置信息以及通过雷达测量当前空间信息,构建当前空间的地图,并规划出到达用户所在位置的路线,按照到达用户所在位置的路线移动至用户身边;接收用户发出的目标位置信息,根据目标位置信息规划出目的地路线;依据目的地路线行走,并通过语音实时指引用户到达目的地。在本发明中,通过采用语音唤醒,实现尽管机器狗不在用户附近仍能启动机器狗,同时,通过自动追踪用户
导盲机器狗.pdf
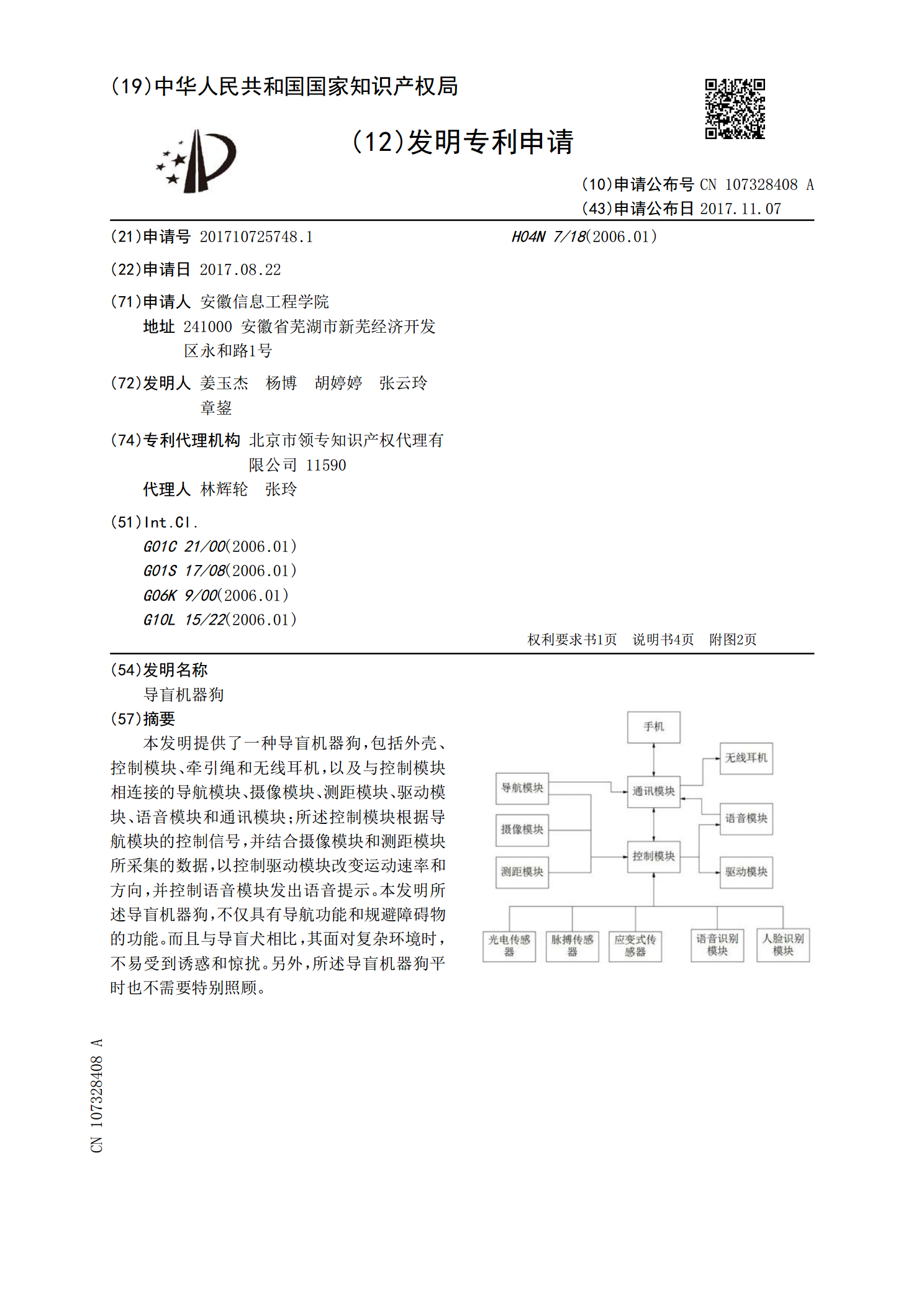
本发明提供了一种导盲机器狗,包括外壳、控制模块、牵引绳和无线耳机,以及与控制模块相连接的导航模块、摄像模块、测距模块、驱动模块、语音模块和通讯模块;所述控制模块根据导航模块的控制信号,并结合摄像模块和测距模块所采集的数据,以控制驱动模块改变运动速率和方向,并控制语音模块发出语音提示。本发明所述导盲机器狗,不仅具有导航功能和规避障碍物的功能。而且与导盲犬相比,其面对复杂环境时,不易受到诱惑和惊扰。另外,所述导盲机器狗平时也不需要特别照顾。

一种基于盲道识别的机器狗导盲运动控制方法.pdf
本发明公开了一种基于盲道识别的机器狗导盲运动控制方法,包括:机器狗的鱼眼相机获取盲道的鱼眼图像,鱼眼图像校正模块进行鱼眼图像校正,得到正常镜头下的图像;对正常镜头下的图像依次进行灰度化、二值化及腐蚀处理后,提取图像中盲道的轮廓并确定图像中盲道中心点;计算盲道中心点与图像中心点构成的像素差向量,基于比例‑积分‑微分控制器的机器狗导盲运动控制模块根据所述像素差向量,实时发布机器狗沿着盲道运动的转向速度指令。本发明适用于机器狗持续沿盲道运动,可提高机器狗对盲道的感知能力,从而进一步提高机器狗导盲的安全性。

一种基于人工智能的导盲机器狗.pdf
本发明公开一种基于人工智能的导盲机器狗,包括牵引绳和导盲机器狗本体,导盲机器狗本体内设置有主控制模块;主控制模块上连接有通讯模块、驱动模块以及语音交互模块;通讯模块包括有蓝牙耳机;主控制模块上还包括有感知模块、避撞跟随模块、视觉模块以及导航模块;有益效果是本发明设计导盲机器狗不需要长时间培训,减少人力、时间的消耗;导盲机器狗无需使用者照顾,更方便;导盲机器狗可协助使用者上地铁、公交等等,解决了部分地区公交、地铁不允许盲人携带导盲犬上去的问题;导盲机器狗可通过分辨红绿灯、斑马线以及盲道,协助使用者出行。
一种机器狗.pdf
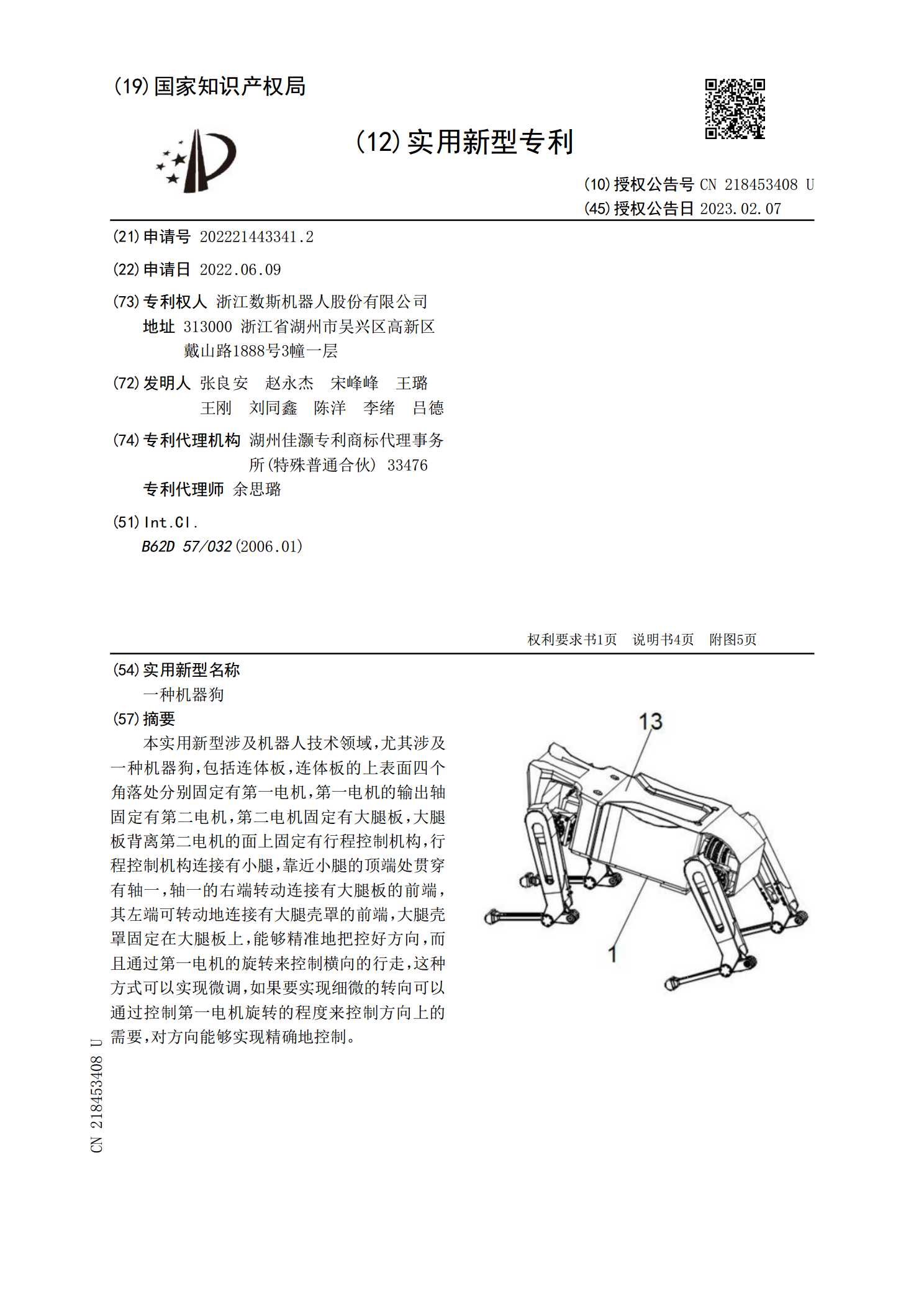
本实用新型涉及机器人技术领域,尤其涉及一种机器狗,包括连体板,连体板的上表面四个角落处分别固定有第一电机,第一电机的输出轴固定有第二电机,第二电机固定有大腿板,大腿板背离第二电机的面上固定有行程控制机构,行程控制机构连接有小腿,靠近小腿的顶端处贯穿有轴一,轴一的右端转动连接有大腿板的前端,其左端可转动地连接有大腿壳罩的前端,大腿壳罩固定在大腿板上,能够精准地把控好方向,而且通过第一电机的旋转来控制横向的行走,这种方式可以实现微调,如果要实现细微的转向可以通过控制第一电机旋转的程度来控制方向上的需要,对方向