
一种架空线路套管机器人.pdf

玄静****写意


1/10
2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种架空线路套管机器人.pdf
本发明公开了一种架空线路套管机器人,包括底座、转动连接在底座的一侧的并用于缠绕套管的缠绕辊,缠绕辊的上方设置有两个驱动轴,底座设置有用于驱动驱动轴转动的电机,驱动轴均固定连接有两个第一限位板,驱动轴之间设置有第一转轴,第一转轴固定连接有两个第二限位板,套管设置有沿套管的轴线方向延伸的开缝,底座滑动连接有滑动座,滑动座转动连接有第二转轴,第二转轴设置在第一转轴的下方并固定连接有两个用于将开缝撑开的支撑板,底座设置有用于给开缝涂抹胶水的胶枪,底座设置有升降装置,架空线路套管机器人还包括用于将套管导向至第一转轴
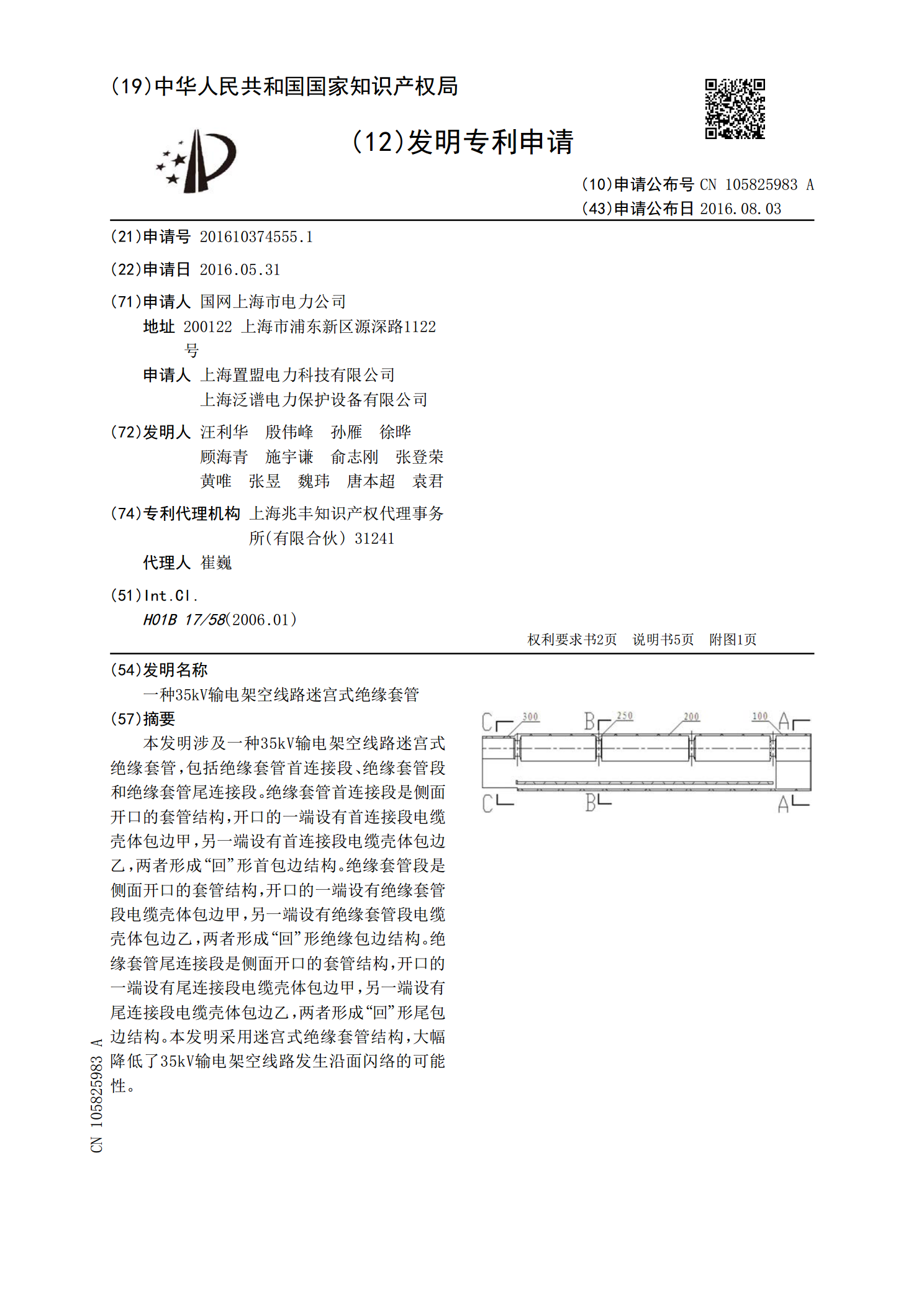
一种35kV输电架空线路迷宫式绝缘套管.pdf
本发明涉及一种35kV输电架空线路迷宫式绝缘套管,包括绝缘套管首连接段、绝缘套管段和绝缘套管尾连接段。绝缘套管首连接段是侧面开口的套管结构,开口的一端设有首连接段电缆壳体包边甲,另一端设有首连接段电缆壳体包边乙,两者形成“回”形首包边结构。绝缘套管段是侧面开口的套管结构,开口的一端设有绝缘套管段电缆壳体包边甲,另一端设有绝缘套管段电缆壳体包边乙,两者形成“回”形绝缘包边结构。绝缘套管尾连接段是侧面开口的套管结构,开口的一端设有尾连接段电缆壳体包边甲,另一端设有尾连接段电缆壳体包边乙,两者形成“回”形尾包边

一种架空输电线路作业机器人.pdf
本发明公开了一种架空输电线路作业机器人,包括吊座和线缆,所述吊座的上表面设有电器盒,所述电器盒内安装有蓄电池、PLC控制器和无线通讯器,所述吊座的中部设有三个轴孔,且轴孔上侧对应安装有传动座,三个传动座的外侧套接有一条皮带,所述吊座的下表面固定有第一电机,所述第一电机的上侧输出轴上固定有与皮带外侧贴合的主动轮,本架空输电线路作业机器人,结构简单,使用方便,固定轮和压轮配合使得整体能够沿线缆进行行走,从而对架空处线缆的老化程度进行检测,检测便捷,提高了电力人员的工作安全性,具有可越障能力,方便经过悬垂线夹、
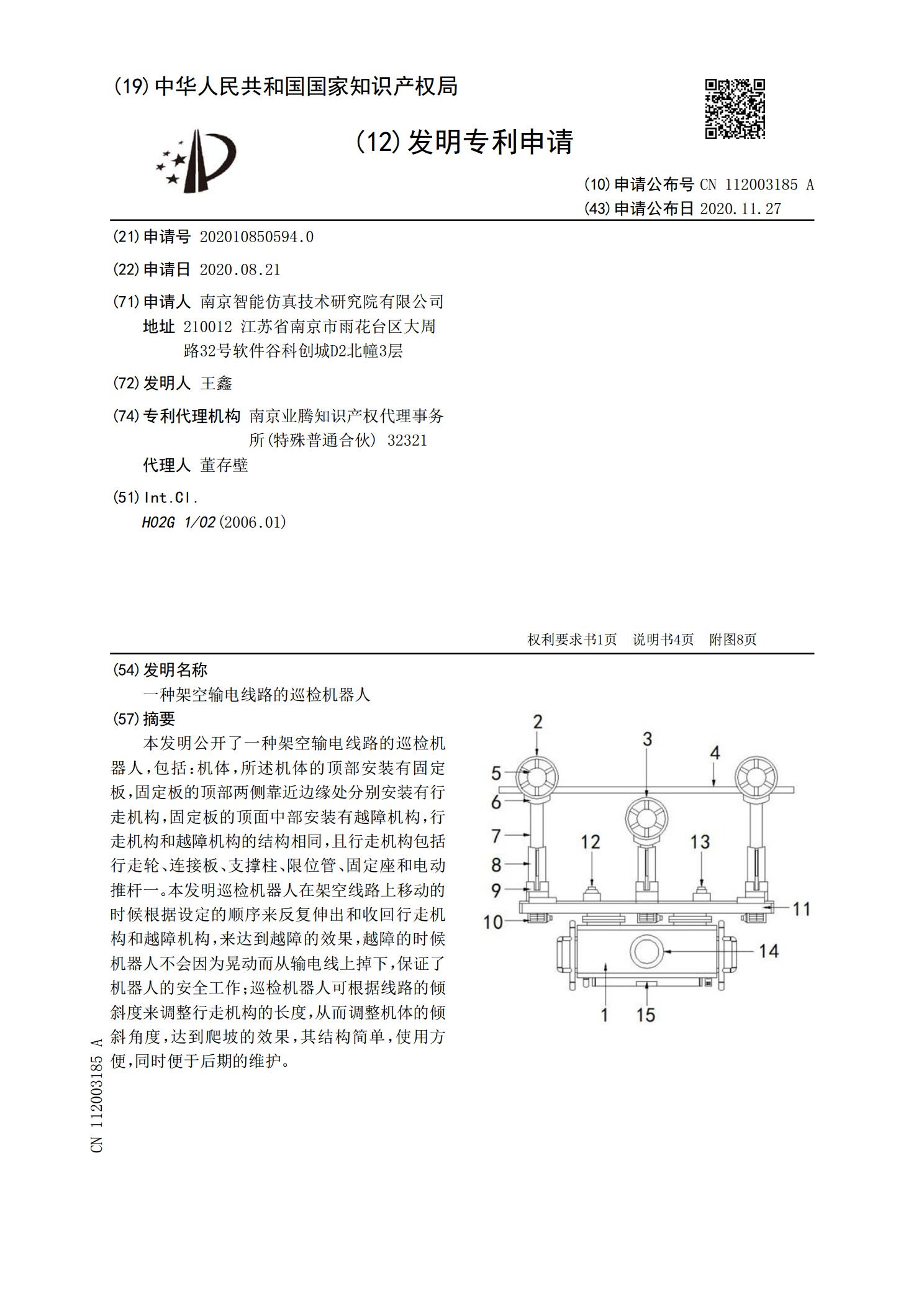
一种架空输电线路的巡检机器人.pdf
本发明公开了一种架空输电线路的巡检机器人,包括:机体,所述机体的顶部安装有固定板,固定板的顶部两侧靠近边缘处分别安装有行走机构,固定板的顶面中部安装有越障机构,行走机构和越障机构的结构相同,且行走机构包括行走轮、连接板、支撑柱、限位管、固定座和电动推杆一。本发明巡检机器人在架空线路上移动的时候根据设定的顺序来反复伸出和收回行走机构和越障机构,来达到越障的效果,越障的时候机器人不会因为晃动而从输电线上掉下,保证了机器人的安全工作;巡检机器人可根据线路的倾斜度来调整行走机构的长度,从而调整机体的倾斜角度,达到

一种架空线路跨越障碍机器人.pdf
本发明提供了一种架空线路跨越障碍机器人,第二爬行板上部通过第二导向板铰接传动板中部,所述传动板中部还通过第三导向板铰接第二爬行板中部,所述第一爬行板中部与底座铰接,第二爬行板中部与底座铰接,在第一爬行板、第二爬行板和传动板下部均铰接带有轮毂电机的滚轮,在底座中部下方设有挂钩,本发明能够通过第一爬行板、第二爬行板和传动板在导线上运行,传动板带动第一爬行板和第二爬行板提升与降落,跨越输电导向上的障碍物,本发明结构简单紧凑,互换性强,可在导地线上运行,跨越输电导线上各种障碍物,由于每个爬行板的结构都相同,在越障