
一种架空输电线路作业机器人.pdf

葫芦****io

1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种架空输电线路作业机器人.pdf
本发明公开了一种架空输电线路作业机器人,包括吊座和线缆,所述吊座的上表面设有电器盒,所述电器盒内安装有蓄电池、PLC控制器和无线通讯器,所述吊座的中部设有三个轴孔,且轴孔上侧对应安装有传动座,三个传动座的外侧套接有一条皮带,所述吊座的下表面固定有第一电机,所述第一电机的上侧输出轴上固定有与皮带外侧贴合的主动轮,本架空输电线路作业机器人,结构简单,使用方便,固定轮和压轮配合使得整体能够沿线缆进行行走,从而对架空处线缆的老化程度进行检测,检测便捷,提高了电力人员的工作安全性,具有可越障能力,方便经过悬垂线夹、

架空输电线路综合作业机器人.pdf
本发明提出一种架空输电线路综合作业机器人,所述架空输电线路综合作业机器人包括:通过中间回转关节(6)铰接连接的前臂(3)与后臂(9),前悬臂(1),设置在所述前臂(3)上;后悬臂(5),设置在所述后臂(9)上;所述前悬臂(1)包括:前支架(18)、设置在所述前支架(18)上的前锁紧框架(13)和前驱动轮(11)、以及设置在所述前锁紧框架(13)上的前锁紧轮(12),所述前锁紧框架(13)可升降的设置在所述前支架(18)上,所述前驱动轮(11)设置在电线的上方,所述前锁紧轮(12)位于所述前驱动轮(11)的

一种架空高压输电线路作业磁力驱动机器人.pdf
一种架空高压输电线路作业磁力驱动机器人,包括两个中心对称于高压导线⑸的可开合驱动瓦⑴,所述驱动瓦⑴包括衬瓦⑶、磁芯⑵、与磁芯⑵相配合的磁芯盖⑹和矩形线圈⑷。其优点是:取代传统的轮轨式驱动方式,从而彻底消除机器人打滑问题;简化了驱动机构,降低了成本、机身重量、能耗及机身尺寸;可提高机器人的移动速度。
一种架空输电线路的巡检机器人.pdf
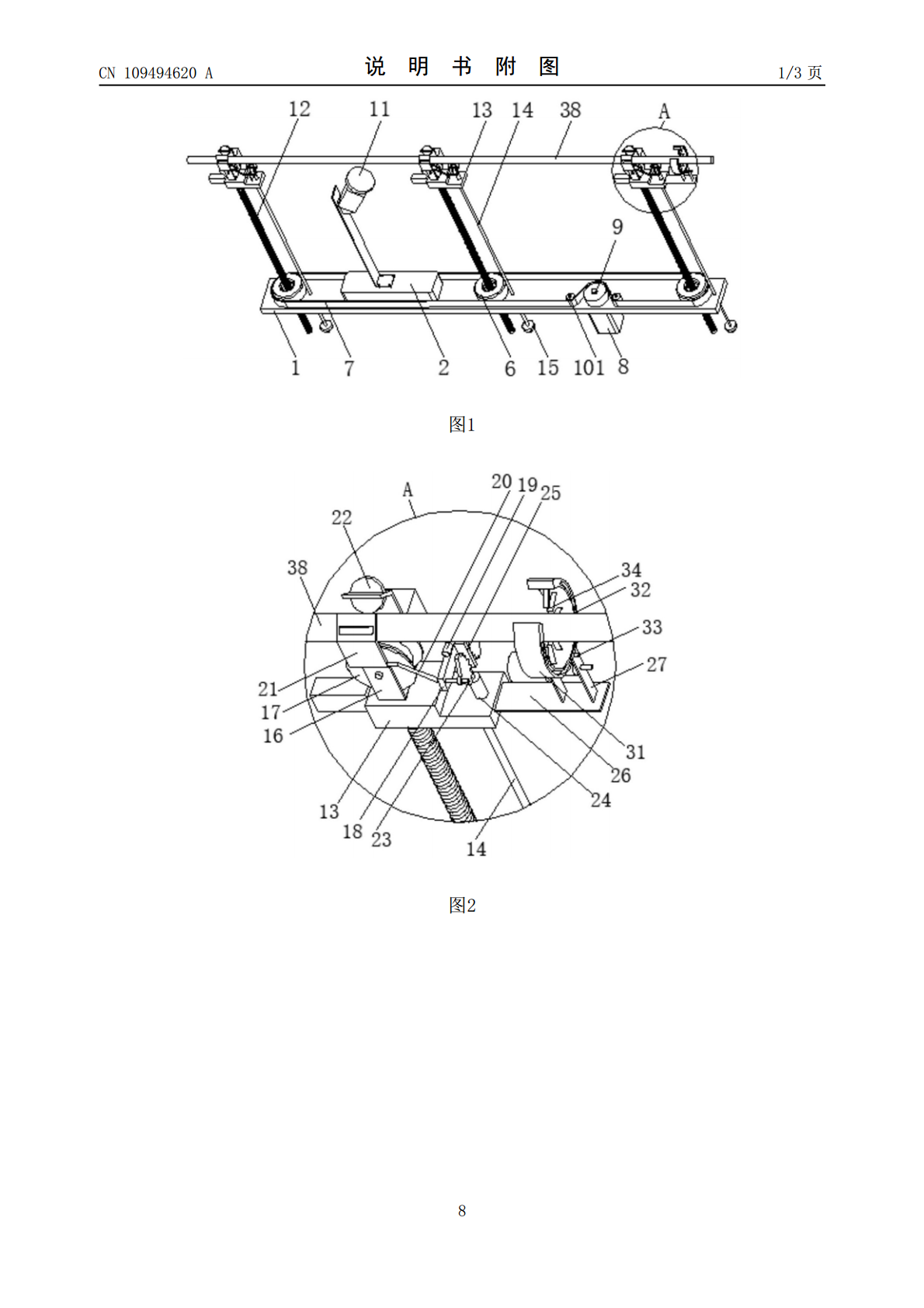
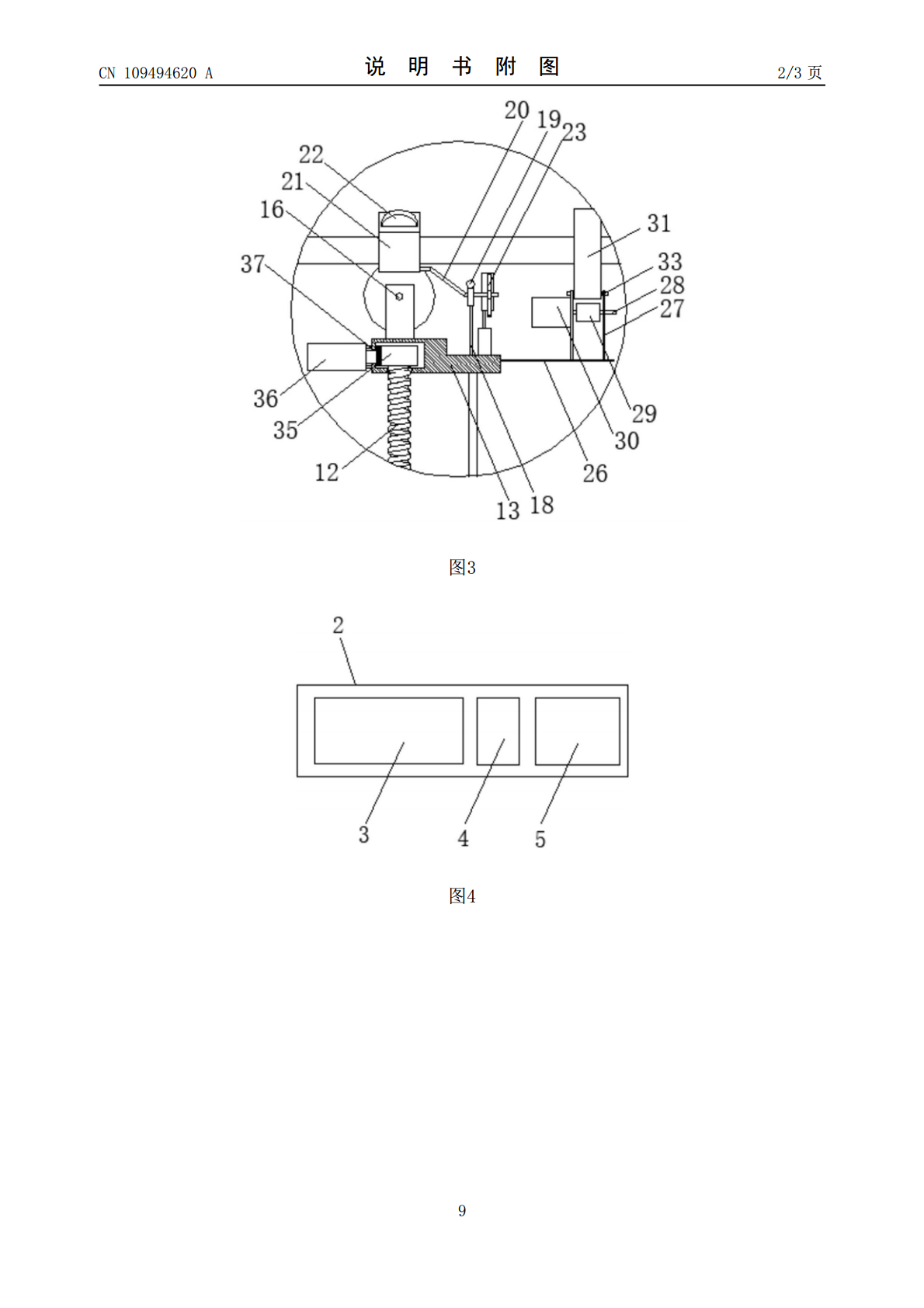
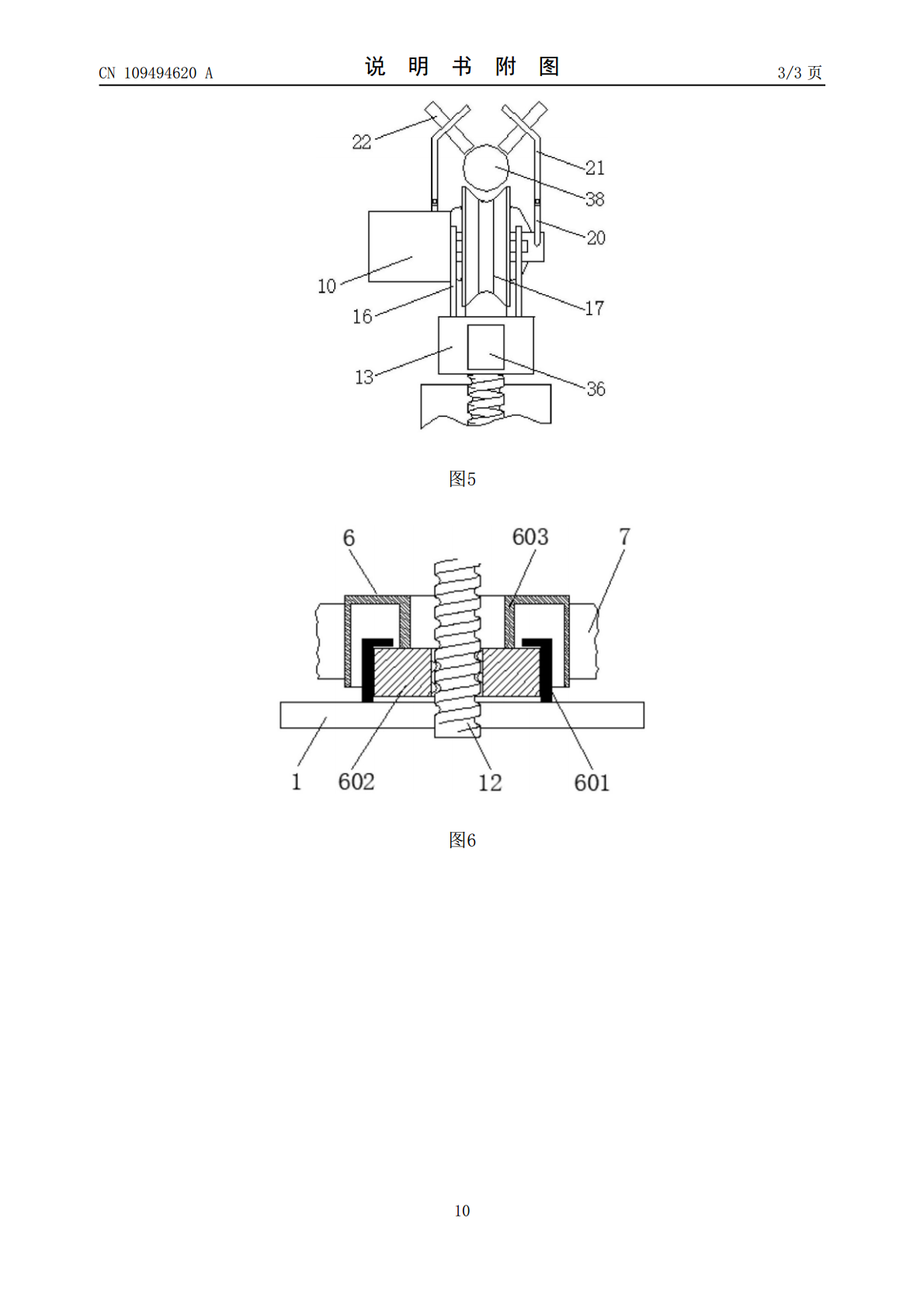
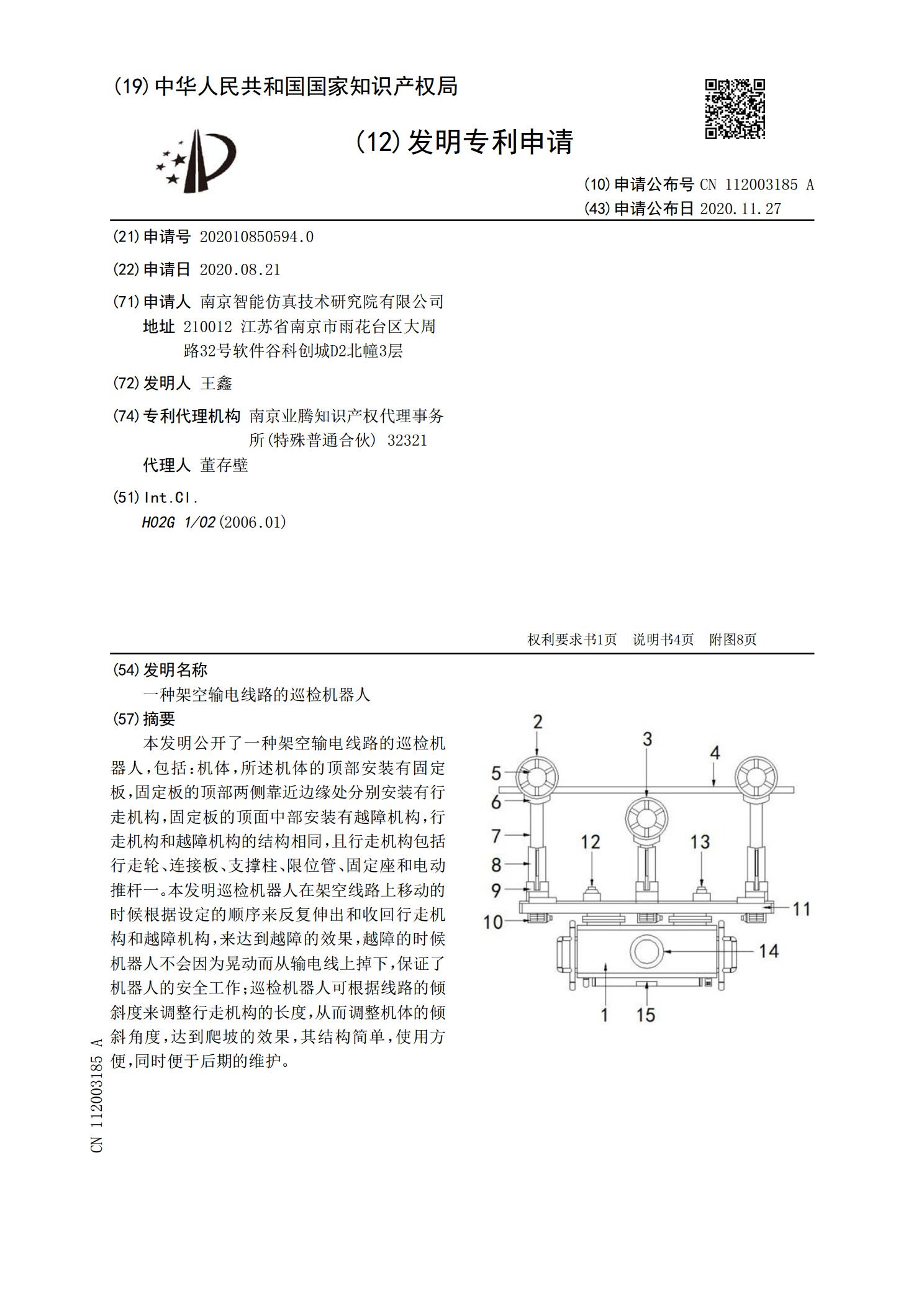
本发明公开了一种架空输电线路的巡检机器人,包括:机体,所述机体的顶部安装有固定板,固定板的顶部两侧靠近边缘处分别安装有行走机构,固定板的顶面中部安装有越障机构,行走机构和越障机构的结构相同,且行走机构包括行走轮、连接板、支撑柱、限位管、固定座和电动推杆一。本发明巡检机器人在架空线路上移动的时候根据设定的顺序来反复伸出和收回行走机构和越障机构,来达到越障的效果,越障的时候机器人不会因为晃动而从输电线上掉下,保证了机器人的安全工作;巡检机器人可根据线路的倾斜度来调整行走机构的长度,从而调整机体的倾斜角度,达到

一种架空输电线路巡线机器人系统.pdf
本发明公开了一种架空输电线路巡线机器人系统,包括若干个结构相同的驱动臂、联板及控制箱,其中驱动臂包括驱动轮机构、升降关节及旋转关节;驱动轮机构包括驱动轮,所述驱动臂分布在机器人一侧,驱动臂通过驱动轮悬挂在分裂导线上,所述驱动轮机构下端通过旋转关节与升降关节连接,升降关节和控制箱固定在联板上。本发明可在越障时路径规划相对简单,可操作性强,无需在跨越障碍的过程中手动对设备进行控制。本发明减轻了主控制器的负担,同时分散了系统风险,有利于提高系统可靠性。同时各功能模块相对独立且完整,如运动控制功能中包含了机器人越