
一种幕墙清洁机器人越障机构.pdf

雨巷****轶丽

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
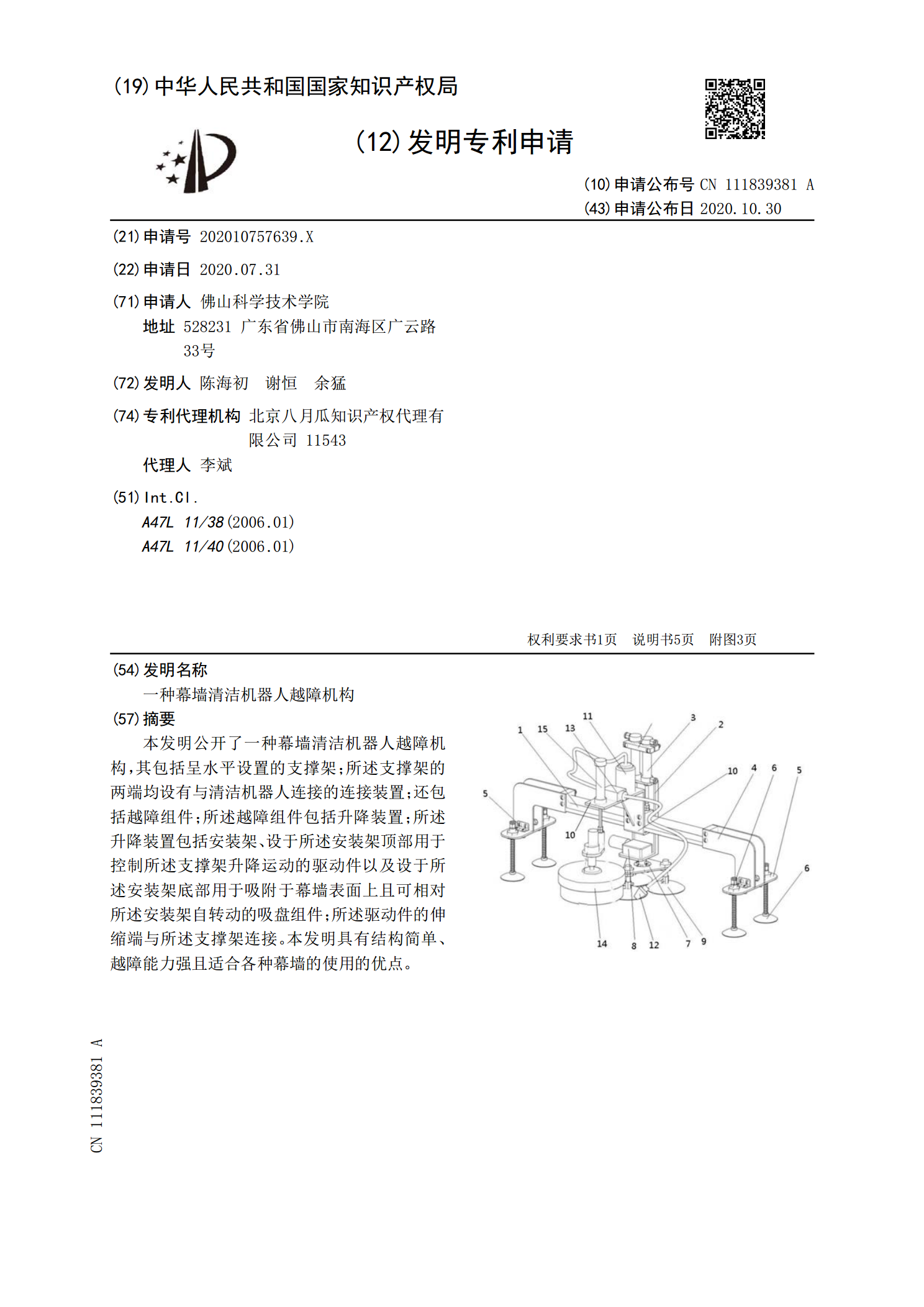
一种幕墙清洁机器人越障机构.pdf
本发明公开了一种幕墙清洁机器人越障机构,其包括呈水平设置的支撑架;所述支撑架的两端均设有与清洁机器人连接的连接装置;还包括越障组件;所述越障组件包括升降装置;所述升降装置包括安装架、设于所述安装架顶部用于控制所述支撑架升降运动的驱动件以及设于所述安装架底部用于吸附于幕墙表面上且可相对所述安装架自转动的吸盘组件;所述驱动件的伸缩端与所述支撑架连接。本发明具有结构简单、越障能力强且适合各种幕墙的使用的优点。
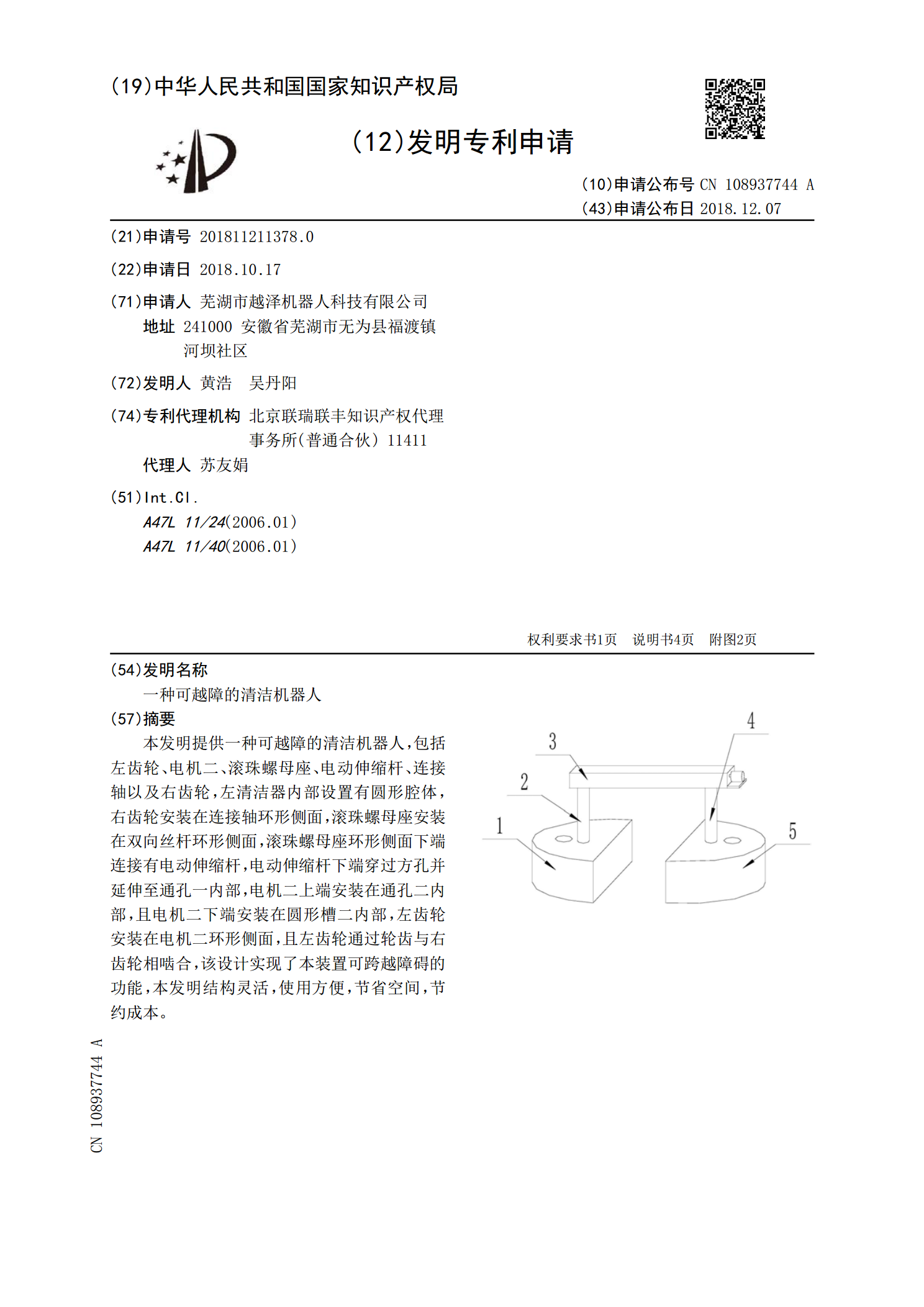
一种可越障的清洁机器人.pdf
本发明提供一种可越障的清洁机器人,包括左齿轮、电机二、滚珠螺母座、电动伸缩杆、连接轴以及右齿轮,左清洁器内部设置有圆形腔体,右齿轮安装在连接轴环形侧面,滚珠螺母座安装在双向丝杆环形侧面,滚珠螺母座环形侧面下端连接有电动伸缩杆,电动伸缩杆下端穿过方孔并延伸至通孔一内部,电机二上端安装在通孔二内部,且电机二下端安装在圆形槽二内部,左齿轮安装在电机二环形侧面,且左齿轮通过轮齿与右齿轮相啮合,该设计实现了本装置可跨越障碍的功能,本发明结构灵活,使用方便,节省空间,节约成本。
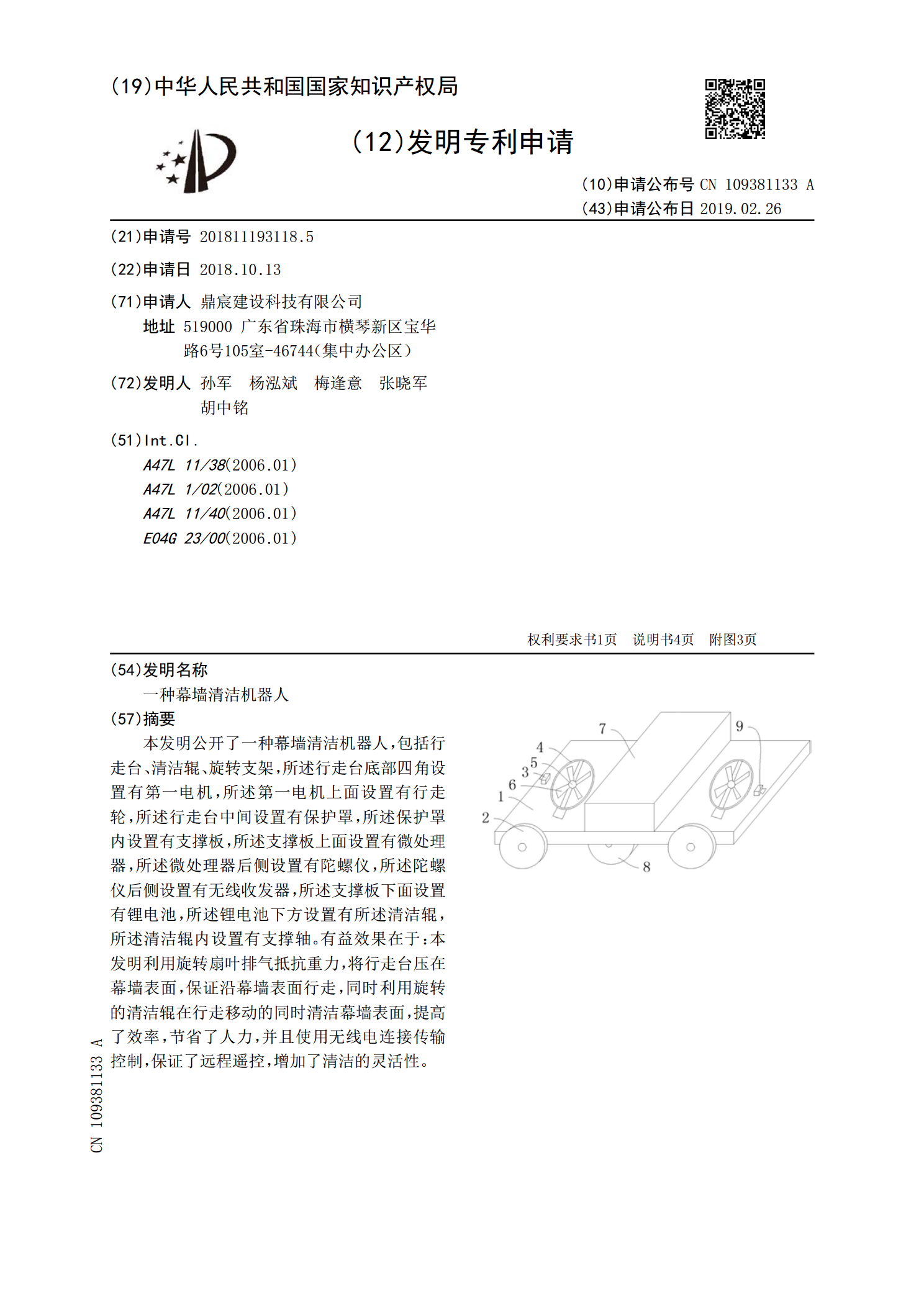
一种幕墙清洁机器人.pdf
本发明公开了一种幕墙清洁机器人,包括行走台、清洁辊、旋转支架,所述行走台底部四角设置有第一电机,所述第一电机上面设置有行走轮,所述行走台中间设置有保护罩,所述保护罩内设置有支撑板,所述支撑板上面设置有微处理器,所述微处理器后侧设置有陀螺仪,所述陀螺仪后侧设置有无线收发器,所述支撑板下面设置有锂电池,所述锂电池下方设置有所述清洁辊,所述清洁辊内设置有支撑轴。有益效果在于:本发明利用旋转扇叶排气抵抗重力,将行走台压在幕墙表面,保证沿幕墙表面行走,同时利用旋转的清洁辊在行走移动的同时清洁幕墙表面,提高了效率,节
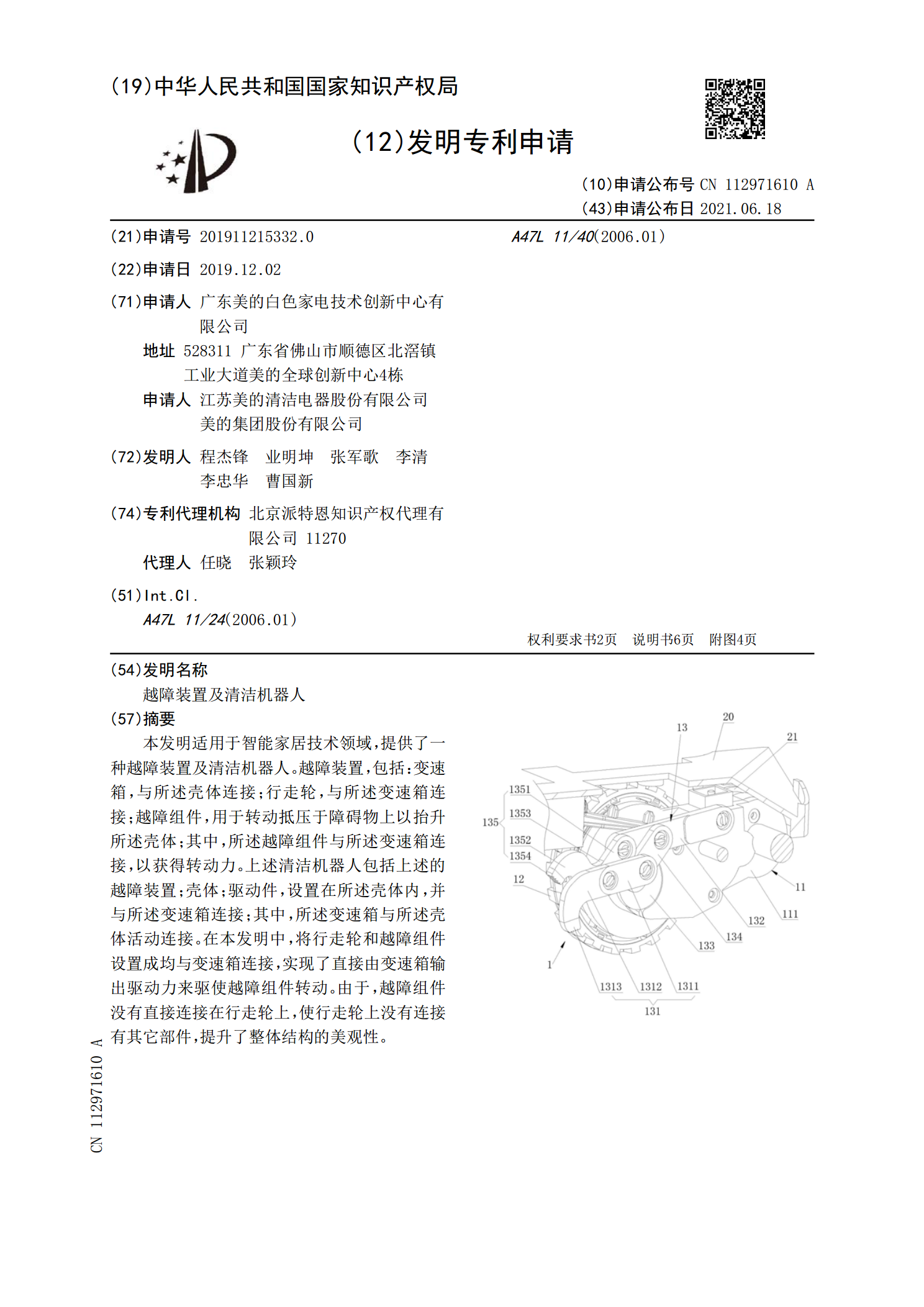
越障装置及清洁机器人.pdf
本发明适用于智能家居技术领域,提供了一种越障装置及清洁机器人。越障装置,包括:变速箱,与所述壳体连接;行走轮,与所述变速箱连接;越障组件,用于转动抵压于障碍物上以抬升所述壳体;其中,所述越障组件与所述变速箱连接,以获得转动力。上述清洁机器人包括上述的越障装置;壳体;驱动件,设置在所述壳体内,并与所述变速箱连接;其中,所述变速箱与所述壳体活动连接。在本发明中,将行走轮和越障组件设置成均与变速箱连接,实现了直接由变速箱输出驱动力来驱使越障组件转动。由于,越障组件没有直接连接在行走轮上,使行走轮上没有连接有其它
越障光伏清洁机器人及其越障方法.pdf
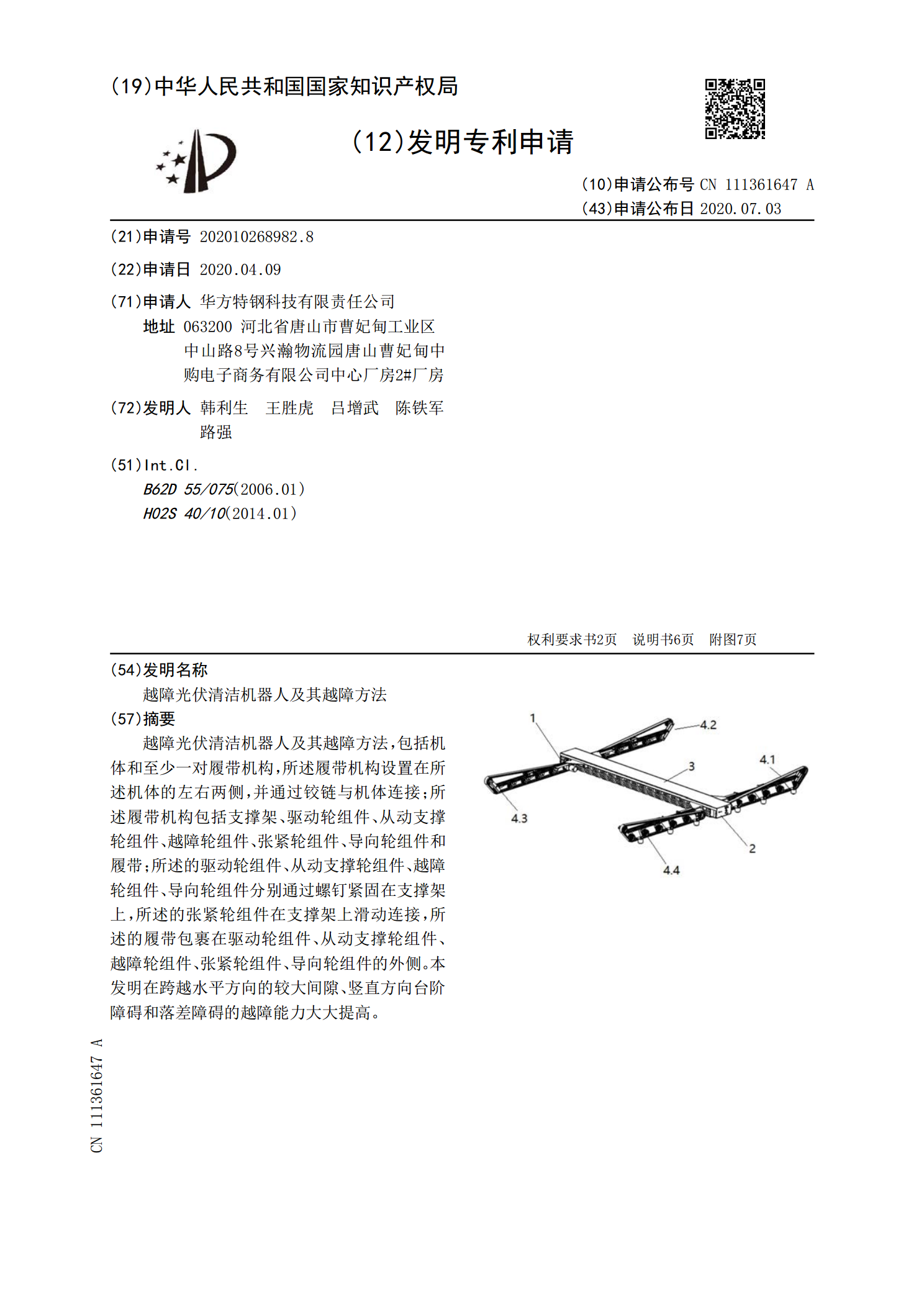
越障光伏清洁机器人及其越障方法,包括机体和至少一对履带机构,所述履带机构设置在所述机体的左右两侧,并通过铰链与机体连接;所述履带机构包括支撑架、驱动轮组件、从动支撑轮组件、越障轮组件、张紧轮组件、导向轮组件和履带;所述的驱动轮组件、从动支撑轮组件、越障轮组件、导向轮组件分别通过螺钉紧固在支撑架上,所述的张紧轮组件在支撑架上滑动连接,所述的履带包裹在驱动轮组件、从动支撑轮组件、越障轮组件、张紧轮组件、导向轮组件的外侧。本发明在跨越水平方向的较大间隙、竖直方向台阶障碍和落差障碍的越障能力大大提高。