
一种幕墙清洁机器人.pdf

羽沫****魔王

1/9

2/9

3/9
4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种幕墙清洁机器人.pdf
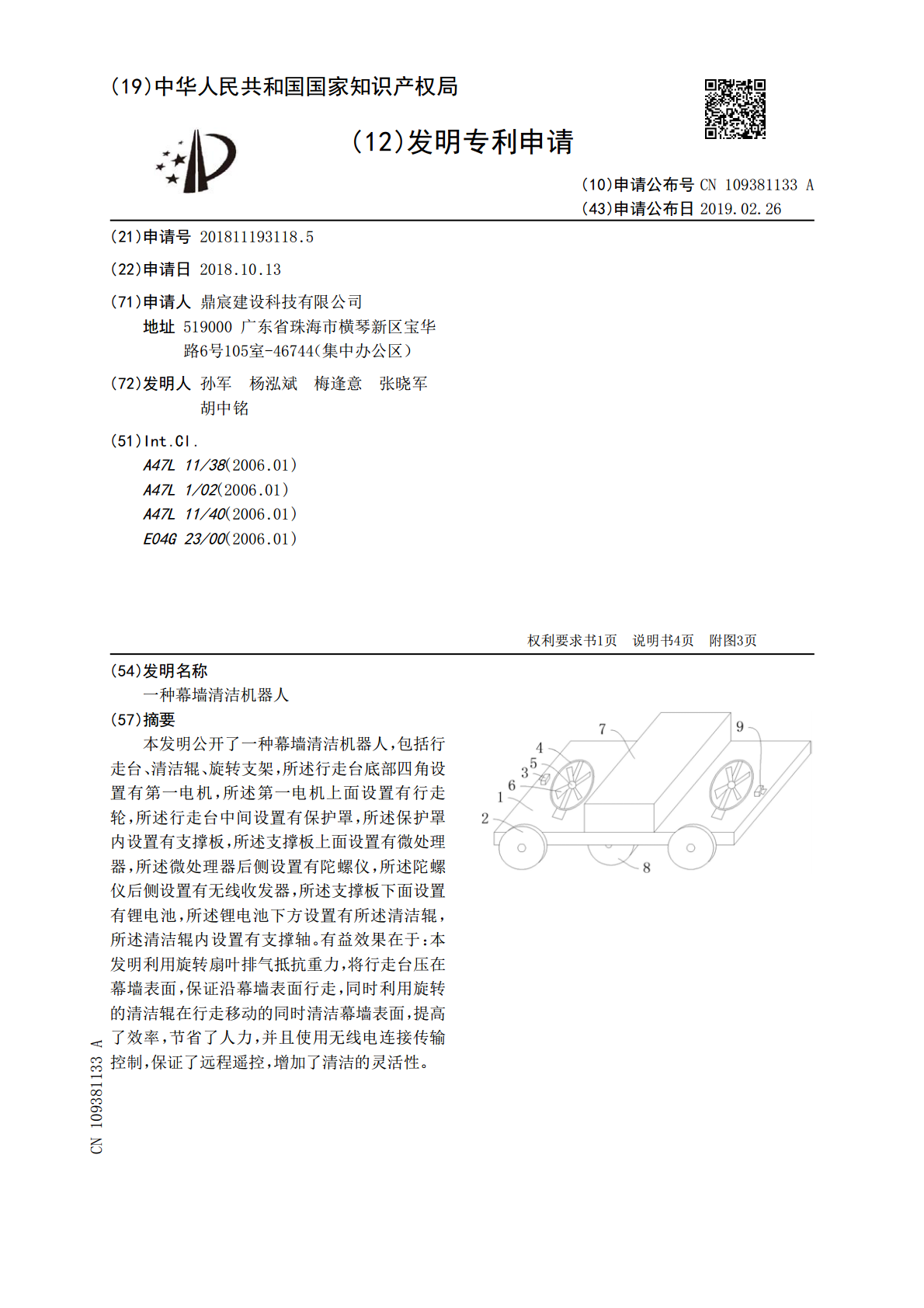
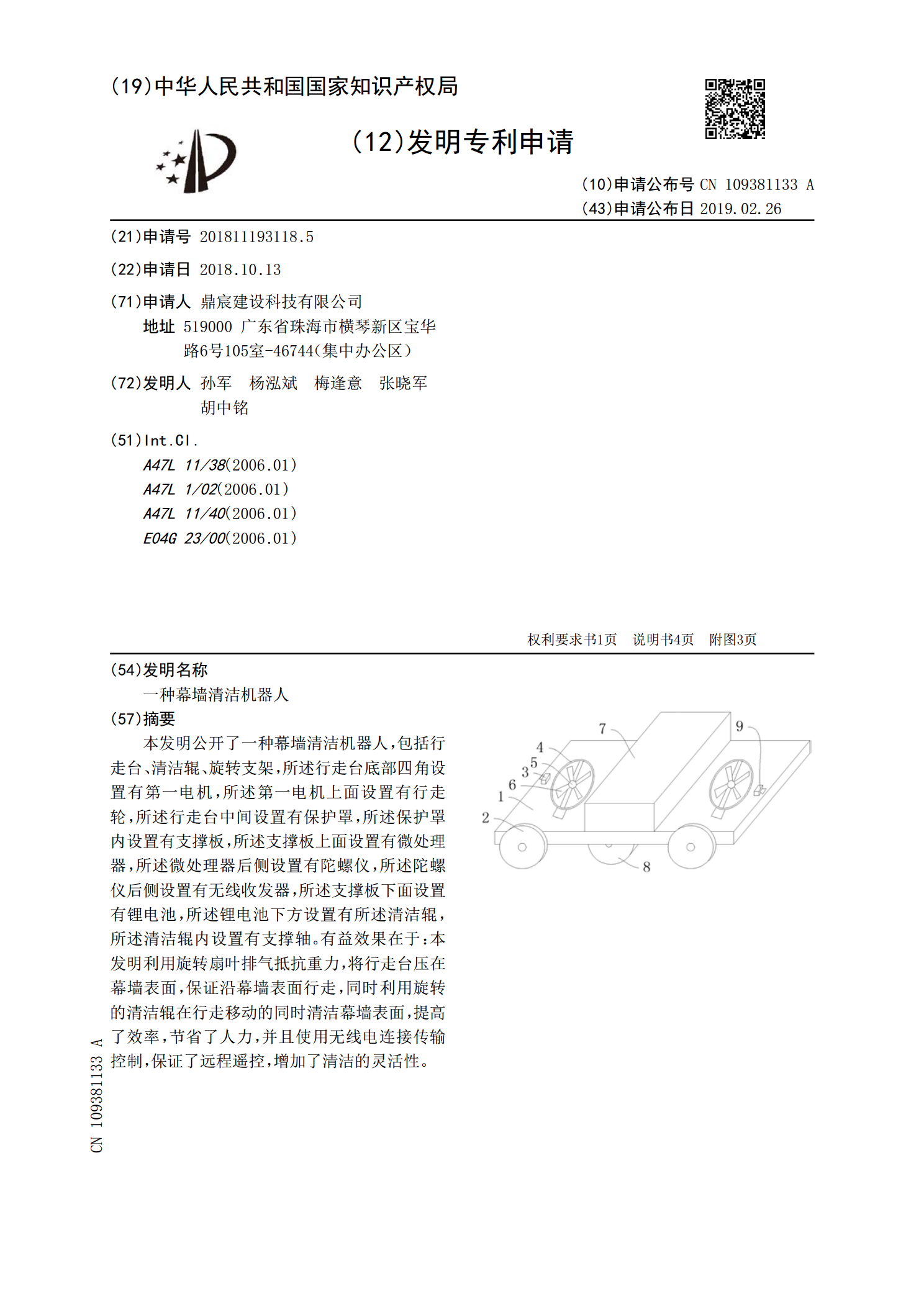
本发明公开了一种幕墙清洁机器人,包括行走台、清洁辊、旋转支架,所述行走台底部四角设置有第一电机,所述第一电机上面设置有行走轮,所述行走台中间设置有保护罩,所述保护罩内设置有支撑板,所述支撑板上面设置有微处理器,所述微处理器后侧设置有陀螺仪,所述陀螺仪后侧设置有无线收发器,所述支撑板下面设置有锂电池,所述锂电池下方设置有所述清洁辊,所述清洁辊内设置有支撑轴。有益效果在于:本发明利用旋转扇叶排气抵抗重力,将行走台压在幕墙表面,保证沿幕墙表面行走,同时利用旋转的清洁辊在行走移动的同时清洁幕墙表面,提高了效率,节
一种玻璃幕墙清洁机器人.pdf
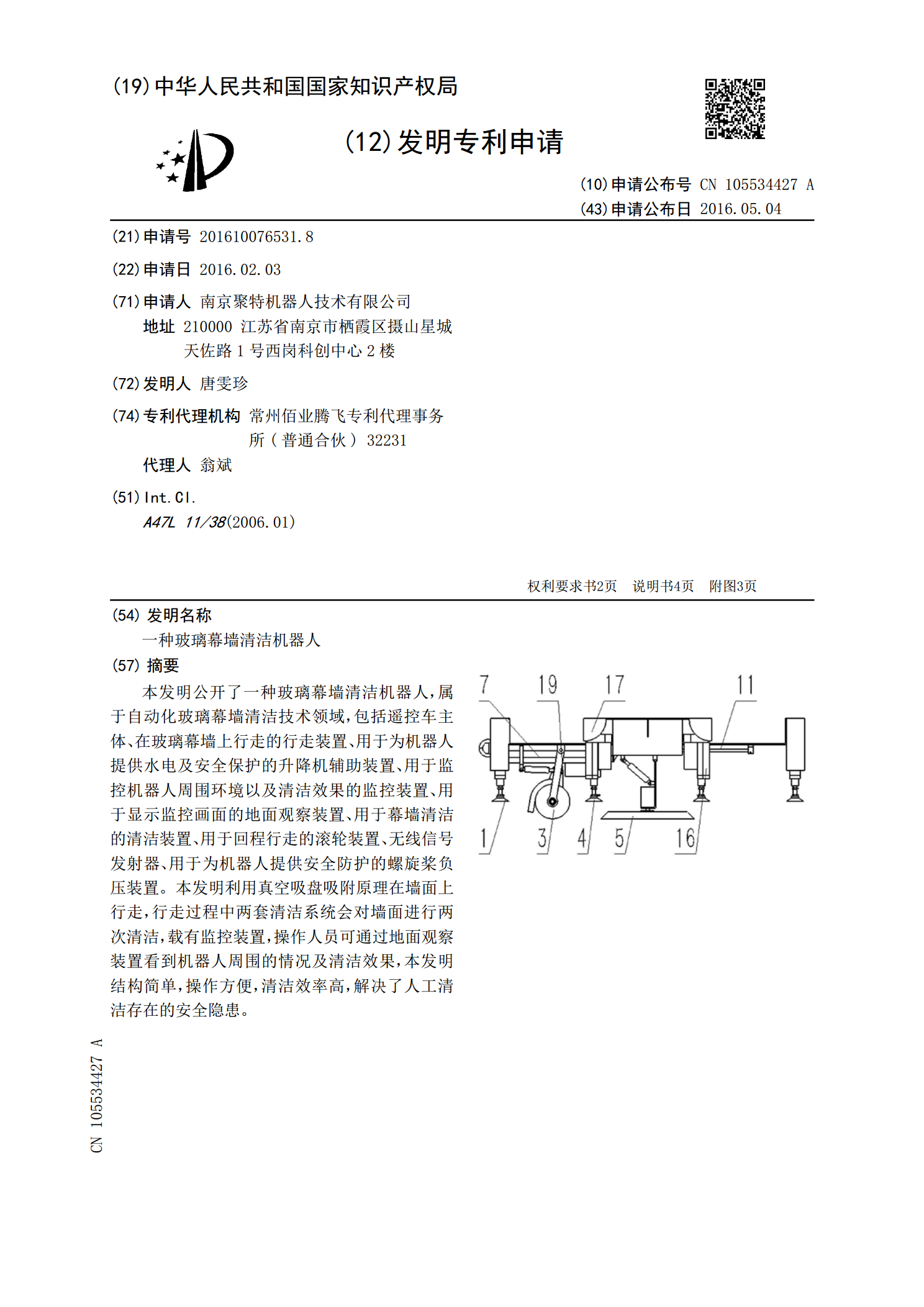
本发明公开了一种玻璃幕墙清洁机器人,属于自动化玻璃幕墙清洁技术领域,包括遥控车主体、在玻璃幕墙上行走的行走装置、用于为机器人提供水电及安全保护的升降机辅助装置、用于监控机器人周围环境以及清洁效果的监控装置、用于显示监控画面的地面观察装置、用于幕墙清洁的清洁装置、用于回程行走的滚轮装置、无线信号发射器、用于为机器人提供安全防护的螺旋桨负压装置。本发明利用真空吸盘吸附原理在墙面上行走,行走过程中两套清洁系统会对墙面进行两次清洁,载有监控装置,操作人员可通过地面观察装置看到机器人周围的情况及清洁效果,本发明结构

一种具有幕墙预处理的幕墙清洁机器人.pdf
本发明提供了一种具有幕墙预处理的幕墙清洁机器人,包括机器人主体、设置于机器人主体前端的吹风装置、设置于机器人主体前端的清洁装置、以及与清洁装置连通的供水管。本发明通过使用气溶胶发生器,相对于传统的喷头结构,气溶胶发生器生成的气溶胶能够相对在空气中更长时间的停留从而能够方便进行长距离的位移,还通过配合上吹风装置,能够对远距离的幕墙进行预处理,使得清洗介质对污物有充足时间进行解离乳化,从而方便后续的清理,整体结构合理,成本低,由于使用了预处理的方式,所以能够有效降低清洗介质的成本,通过时间成本换取高剂量,同时

一种玻璃幕墙简易清洁机器人.pdf
本发明涉及机器人技术领域,尤其是一种玻璃幕墙简易清洁机器人。它包括主机体、前驱动轮和后驱动轮、前导滑轮组、后导滑轮组、电动提升器及钢丝吊索;主机体上设置有洗涤剂存储腔、泵体容置腔、清水喷射室和风道室,清水喷射室内装设有清水喷射头组件,洗涤剂存储腔上装设有洗涤剂喷射头组件,泵体容置腔内装设有第一加压泵和第二加压泵,风道室内装设有毛刷辊。本发明能够沿着钢丝吊索在墙壁上逐渐向上攀升,通过清水喷射头组件向幕墙墙壁喷射清水以润化附着于墙壁上的固体沉积物或印渍,而后洗涤剂喷射头组件向经过清水清理的区域喷射清洁物质,最

一种双吸盘玻璃幕墙清洁机器人.pdf
本发明提供了一种双吸盘玻璃幕墙清洁机器人。其特征包括:牵引机构、起升机构、换向机构、动力装置、清洁装置、吸附装置和安全装置。牵引机构由双钢丝绳卷绕和直线导轨机构组成;起升机构由小蜗轮和小蜗杆组成;换向机构由大蜗轮和大蜗杆组成;动力由直流电机提供;清洁装置由旋转毛刷和弹簧伸缩机构组成;吸附装置由吸盘和鼓风机组成;安全装置由安全环和安全绳组成。该机器人通过吸附装置吸附于玻璃幕墙表面,利用牵引机构实现前进,同时清洁装置保持旋转擦拭,而牵引机构、起升机构和换向机构协同工作可完成前进擦拭、越障和换行。本机器人可实现