
一种飞行仿生控制手臂救援机器人.pdf

雨巷****可歆

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种飞行仿生控制手臂救援机器人.pdf
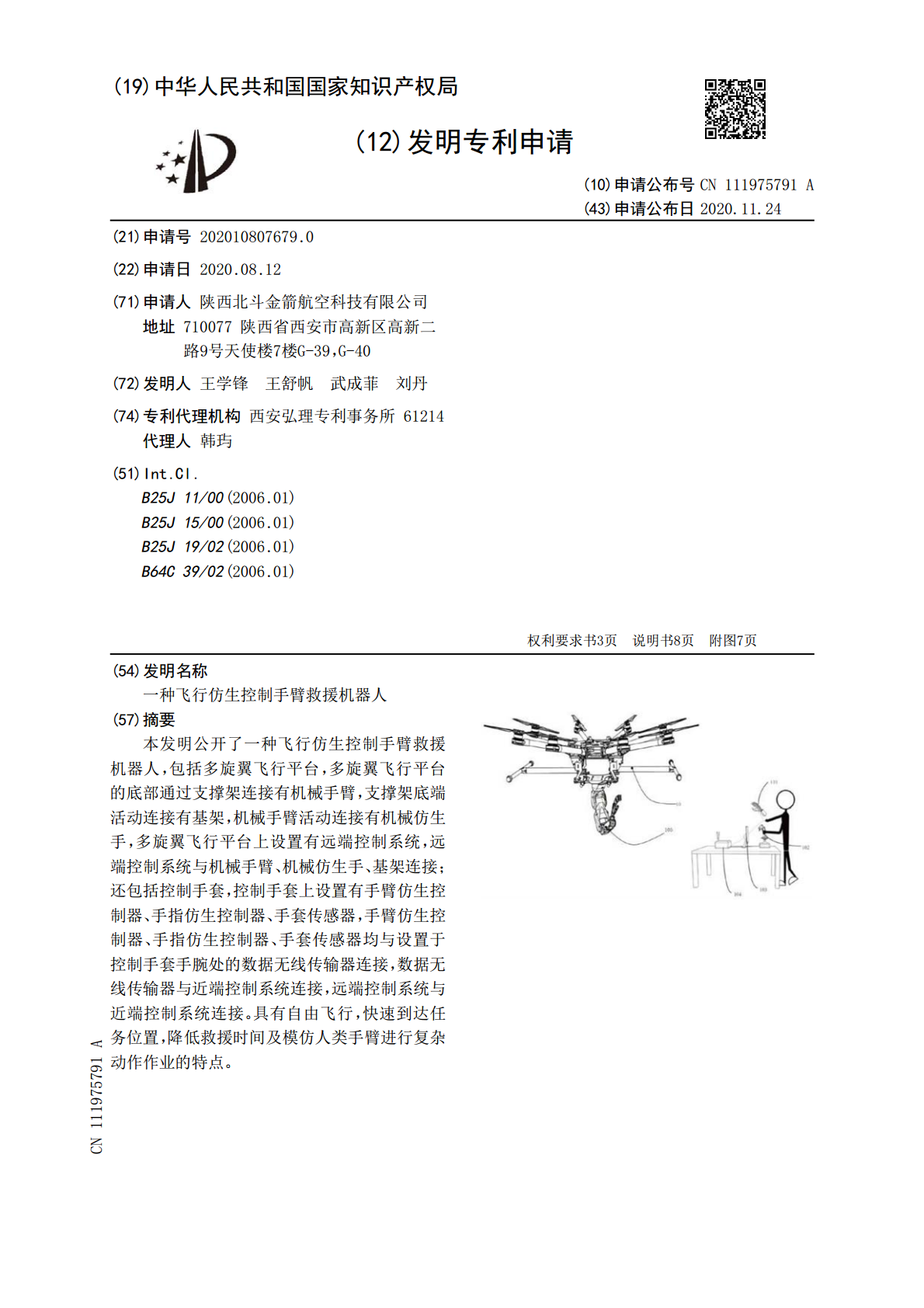
本发明公开了一种飞行仿生控制手臂救援机器人,包括多旋翼飞行平台,多旋翼飞行平台的底部通过支撑架连接有机械手臂,支撑架底端活动连接有基架,机械手臂活动连接有机械仿生手,多旋翼飞行平台上设置有远端控制系统,远端控制系统与机械手臂、机械仿生手、基架连接;还包括控制手套,控制手套上设置有手臂仿生控制器、手指仿生控制器、手套传感器,手臂仿生控制器、手指仿生控制器、手套传感器均与设置于控制手套手腕处的数据无线传输器连接,数据无线传输器与近端控制系统连接,远端控制系统与近端控制系统连接。具有自由飞行,快速到达任务位置,

一种仿生机器人手臂转向结构.pdf
本发明涉及一种仿生机器人手臂转向结构,包括驱动箱体,驱动箱体的一端固定有用于与仿形机器人连接的连接固定块,驱动箱体另一端固定连接有旋转体,旋转体一端面均匀的固定有若干个连接杆,本发明通过电机启动转动时,旋转体上的限位环与驱动箱体的内壁贴合旋转,起到限位作用,保护了旋转体的轴向移动,并保证了驱动电机的正常运转,而且驱动电机采用伺服电机使控制的精度大幅提高,并由偏心阳盘及偏心阴盘的外部的环形波纹凸块与针齿壳腔体内一组环行排列的上针齿套内的针齿销轴相啮哈,以组成少齿差内啮合转动机构,这样为高功率大扭矩输出提供了
一种外科手术用多指节仿生机器人手臂.pdf
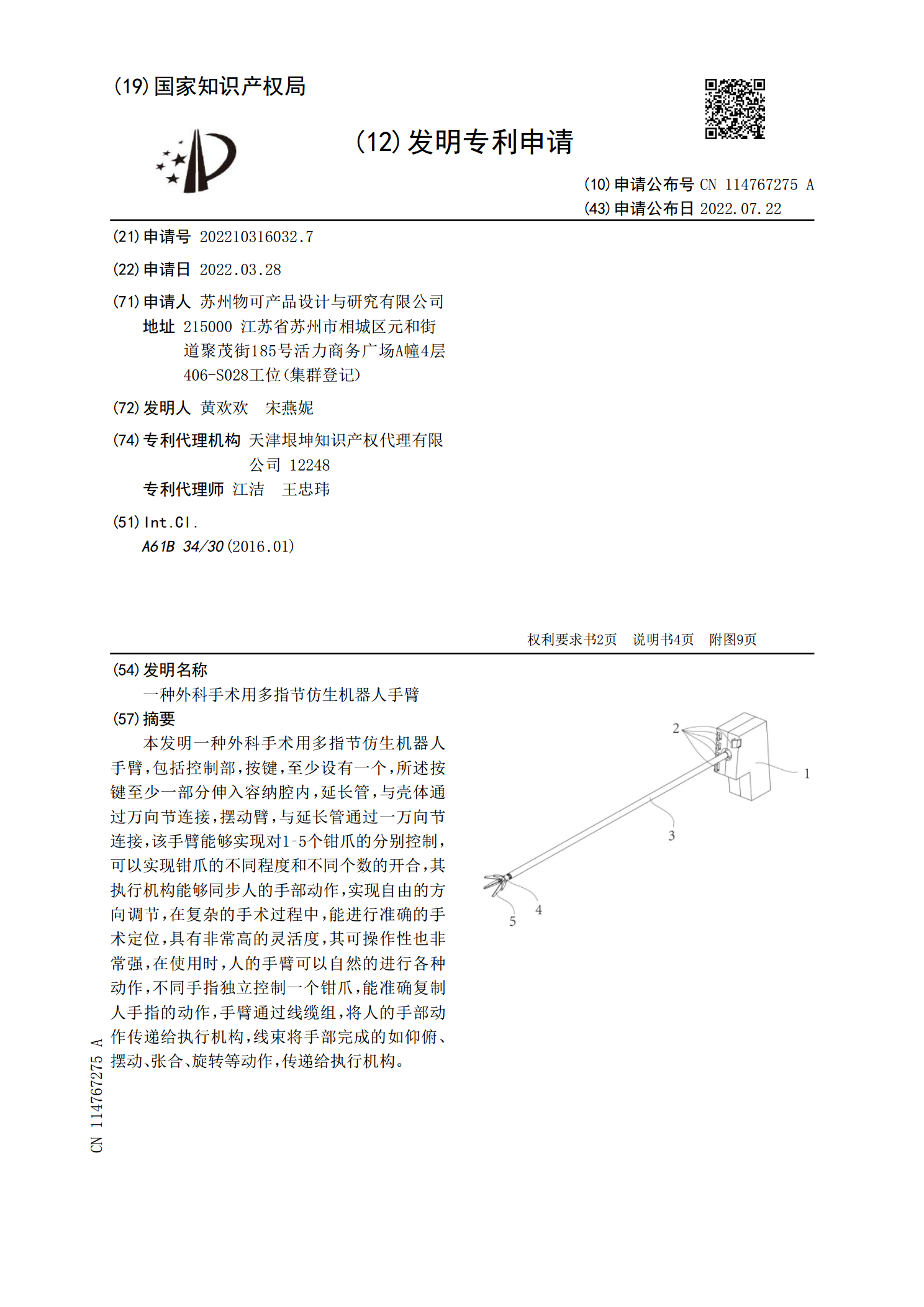
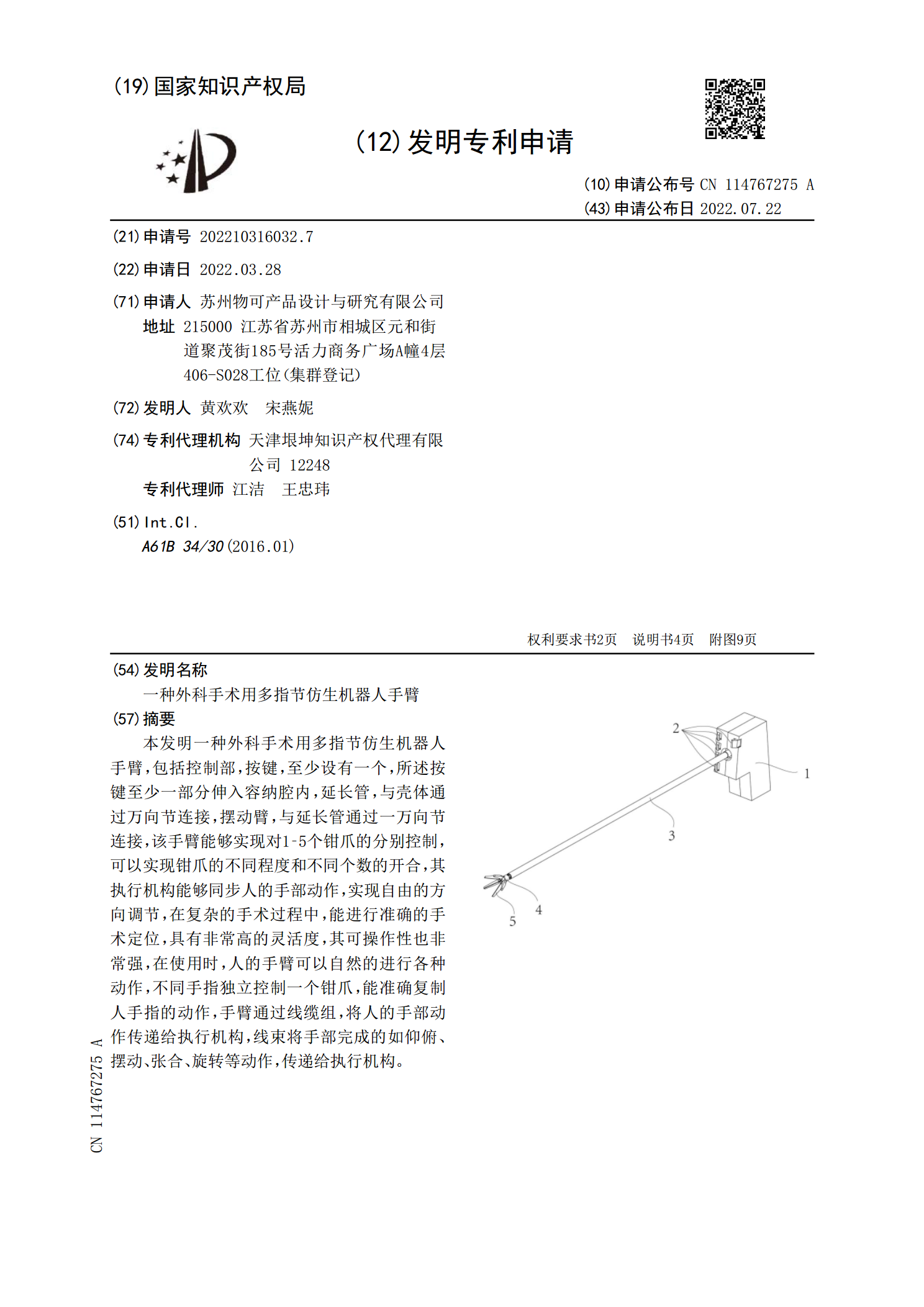
本发明一种外科手术用多指节仿生机器人手臂,包括控制部,按键,至少设有一个,所述按键至少一部分伸入容纳腔内,延长管,与壳体通过万向节连接,摆动臂,与延长管通过一万向节连接,该手臂能够实现对1?5个钳爪的分别控制,可以实现钳爪的不同程度和不同个数的开合,其执行机构能够同步人的手部动作,实现自由的方向调节,在复杂的手术过程中,能进行准确的手术定位,具有非常高的灵活度,其可操作性也非常强,在使用时,人的手臂可以自然的进行各种动作,不同手指独立控制一个钳爪,能准确复制人手指的动作,手臂通过线缆组,将人的手部动作传递
一种外科手术用多指节仿生机器人手臂.pdf
本发明一种外科手术用多指节仿生机器人手臂,包括控制部,按键,至少设有一个,所述按键至少一部分伸入容纳腔内,延长管,与壳体通过万向节连接,摆动臂,与延长管通过一万向节连接,该手臂能够实现对1?5个钳爪的分别控制,可以实现钳爪的不同程度和不同个数的开合,其执行机构能够同步人的手部动作,实现自由的方向调节,在复杂的手术过程中,能进行准确的手术定位,具有非常高的灵活度,其可操作性也非常强,在使用时,人的手臂可以自然的进行各种动作,不同手指独立控制一个钳爪,能准确复制人手指的动作,手臂通过线缆组,将人的手部动作传递
仿生青蛙海边救援机器人.pdf
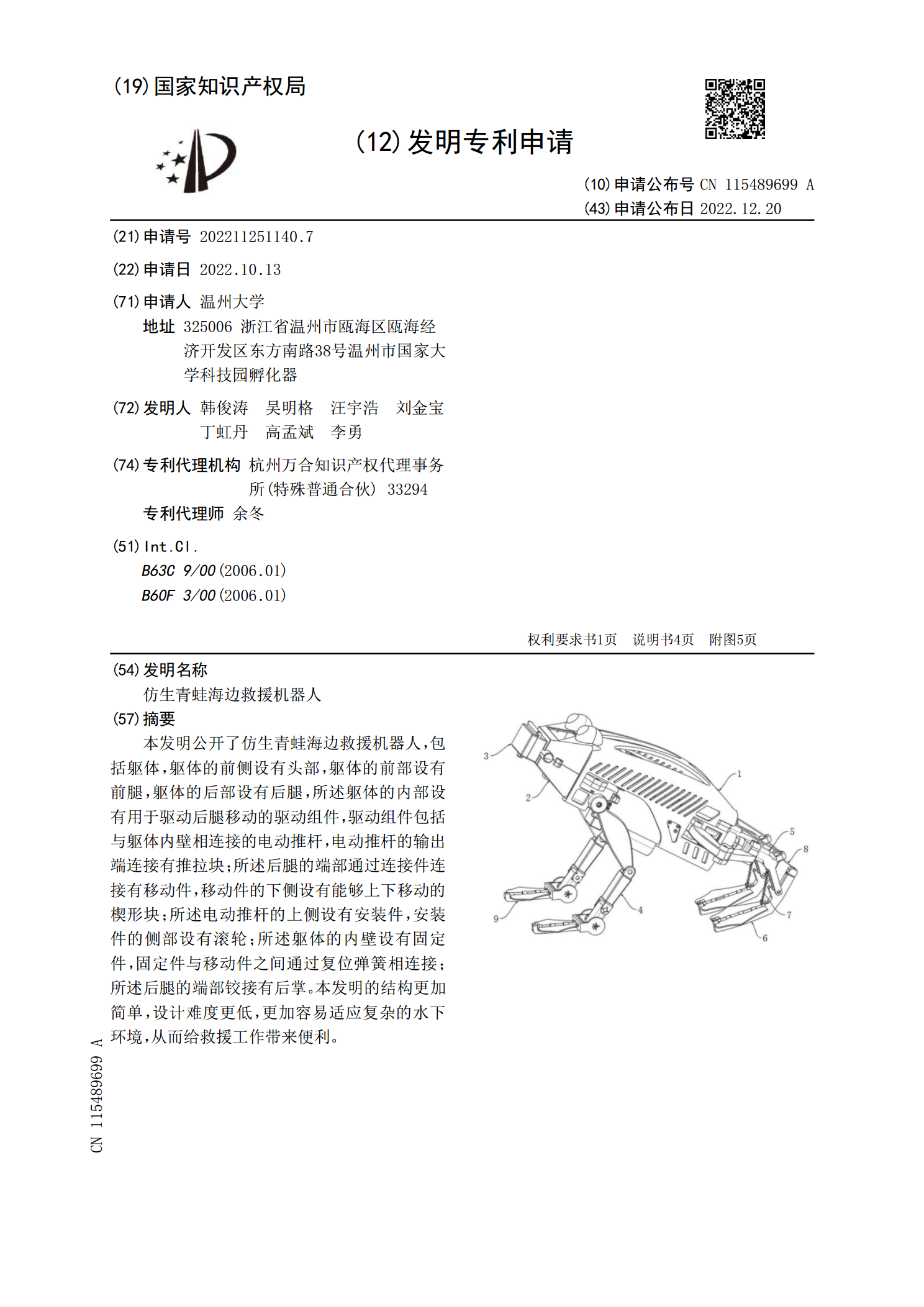
本发明公开了仿生青蛙海边救援机器人,包括躯体,躯体的前侧设有头部,躯体的前部设有前腿,躯体的后部设有后腿,所述躯体的内部设有用于驱动后腿移动的驱动组件,驱动组件包括与躯体内壁相连接的电动推杆,电动推杆的输出端连接有推拉块;所述后腿的端部通过连接件连接有移动件,移动件的下侧设有能够上下移动的楔形块;所述电动推杆的上侧设有安装件,安装件的侧部设有滚轮;所述躯体的内壁设有固定件,固定件与移动件之间通过复位弹簧相连接;所述后腿的端部铰接有后掌。本发明的结构更加简单,设计难度更低,更加容易适应复杂的水下环境,从而给