
一种仿生机器人手臂转向结构.pdf

努力****亚捷


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种仿生机器人手臂转向结构.pdf
本发明涉及一种仿生机器人手臂转向结构,包括驱动箱体,驱动箱体的一端固定有用于与仿形机器人连接的连接固定块,驱动箱体另一端固定连接有旋转体,旋转体一端面均匀的固定有若干个连接杆,本发明通过电机启动转动时,旋转体上的限位环与驱动箱体的内壁贴合旋转,起到限位作用,保护了旋转体的轴向移动,并保证了驱动电机的正常运转,而且驱动电机采用伺服电机使控制的精度大幅提高,并由偏心阳盘及偏心阴盘的外部的环形波纹凸块与针齿壳腔体内一组环行排列的上针齿套内的针齿销轴相啮哈,以组成少齿差内啮合转动机构,这样为高功率大扭矩输出提供了
一种飞行仿生控制手臂救援机器人.pdf
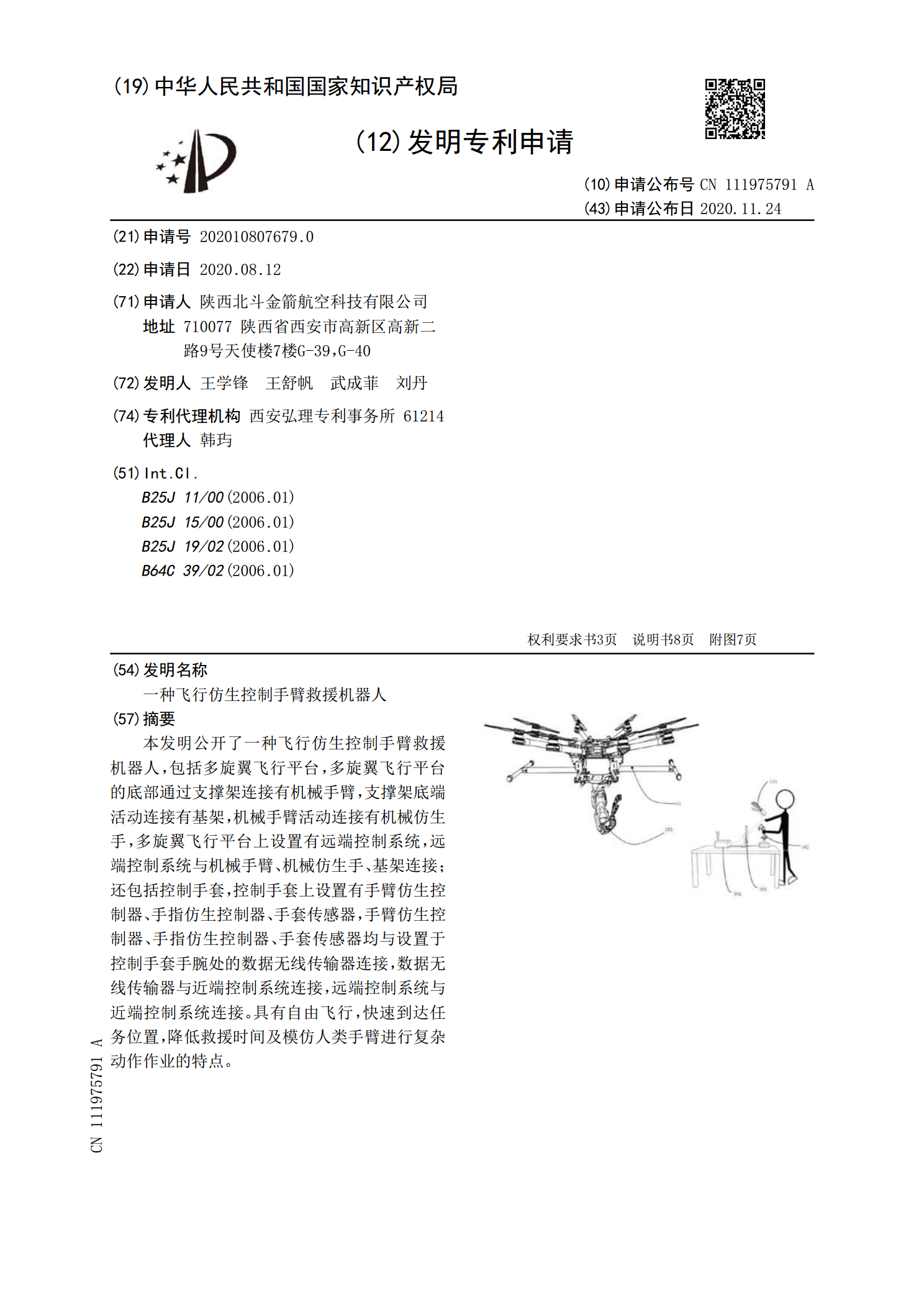
本发明公开了一种飞行仿生控制手臂救援机器人,包括多旋翼飞行平台,多旋翼飞行平台的底部通过支撑架连接有机械手臂,支撑架底端活动连接有基架,机械手臂活动连接有机械仿生手,多旋翼飞行平台上设置有远端控制系统,远端控制系统与机械手臂、机械仿生手、基架连接;还包括控制手套,控制手套上设置有手臂仿生控制器、手指仿生控制器、手套传感器,手臂仿生控制器、手指仿生控制器、手套传感器均与设置于控制手套手腕处的数据无线传输器连接,数据无线传输器与近端控制系统连接,远端控制系统与近端控制系统连接。具有自由飞行,快速到达任务位置,
一种手臂结构及机器人.pdf
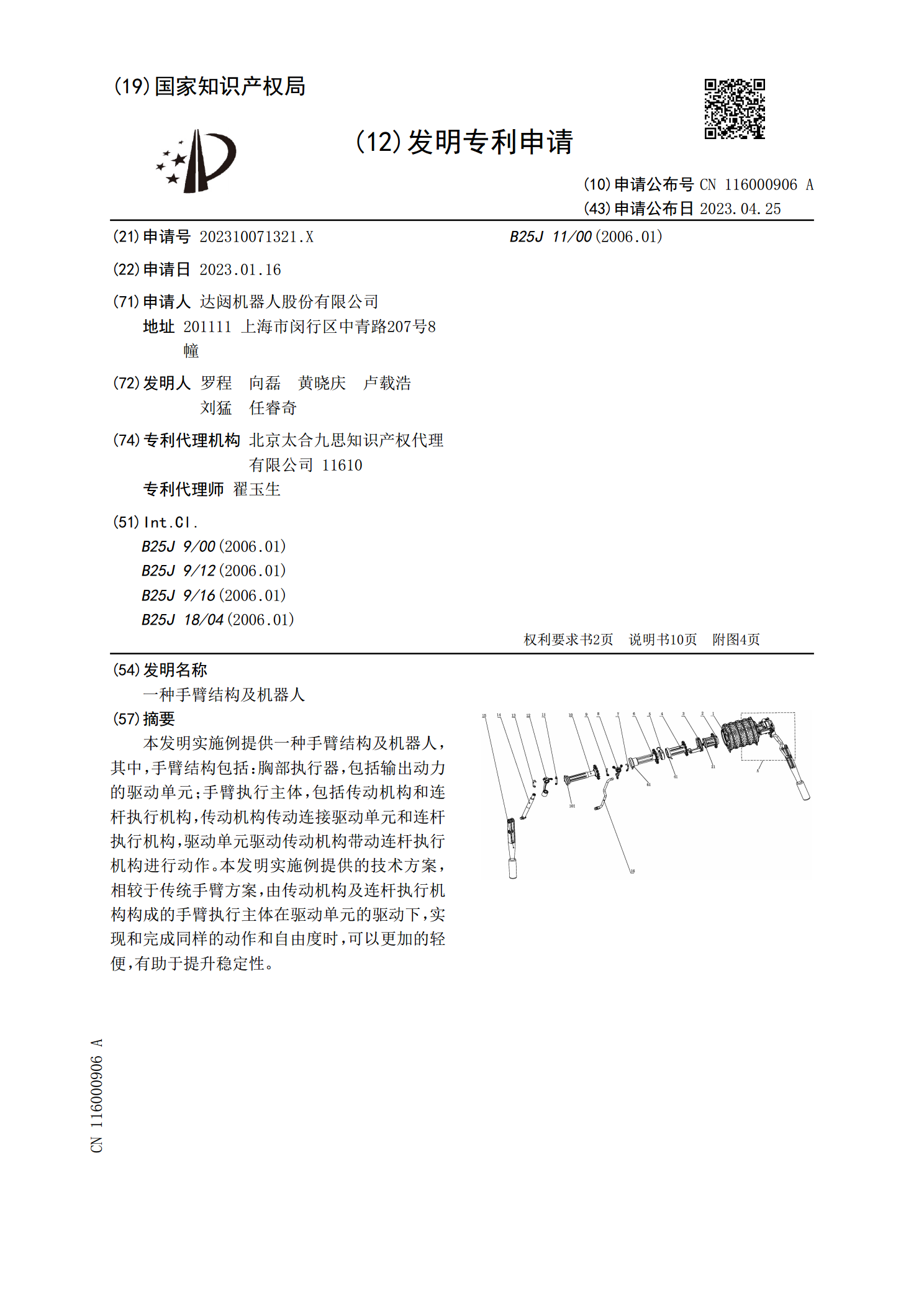
本发明实施例提供一种手臂结构及机器人,其中,手臂结构包括:胸部执行器,包括输出动力的驱动单元;手臂执行主体,包括传动机构和连杆执行机构,传动机构传动连接驱动单元和连杆执行机构,驱动单元驱动传动机构带动连杆执行机构进行动作。本发明实施例提供的技术方案,相较于传统手臂方案,由传动机构及连杆执行机构构成的手臂执行主体在驱动单元的驱动下,实现和完成同样的动作和自由度时,可以更加的轻便,有助于提升稳定性。

一种仿生机器人原地转向装置.pdf
本发明公开了一种仿生机器人原地转向装置,包括第一固定板,所述第一固定板的上表面开设有两个卡槽,所述卡槽内壁的下表面与卡块的上表面搭接,所述卡块的外表面与第一防滑垫的内表面固定连接,所述卡块的上表面与第一转轴的底端固定连接,所述第一转轴的外表面套接有第一轴承,所述第一轴承卡接在固定板的下表面,所述固定板的上表面卡接有第二轴承,本发明通过在固定座底端固定安装的辊子,可以实现在一个方向来回移动本装置,而且通过气缸的作用力,可以使得第二滑杆在限位套筒内滑动,这样就可以使得轮子能底面接触,这样就可以实现另一个方向的

一种机器人手臂手抓结构.pdf
本发明提供一种机器人手臂手抓结构,包括连接罩、后抓板、上齿条、后连接杆、前连接杆、前抓板、下齿条、前托板以及后托板,上齿条下端安装在齿轮上端,下齿条上端安装在齿轮下端,后抓板连接在上齿条下侧面后端,前抓板连接在下齿条上侧面前端,连接罩右侧面前端与后端均固定有滑条,前连接杆左侧面与后连接杆左侧面均开设有滑槽,滑条安装在滑槽内部,前托板固定在伸缩杆一左端,后托板固定在伸缩杆二左端,该设计实现了用同一个设备抓取体积大小不同的物料,同时抓取过程中物料不晃动且不易掉落,本发明结构灵活,适用性强,抓紧牢固,可靠性高。