
仿生青蛙海边救援机器人.pdf

一吃****书竹

1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
仿生青蛙海边救援机器人.pdf
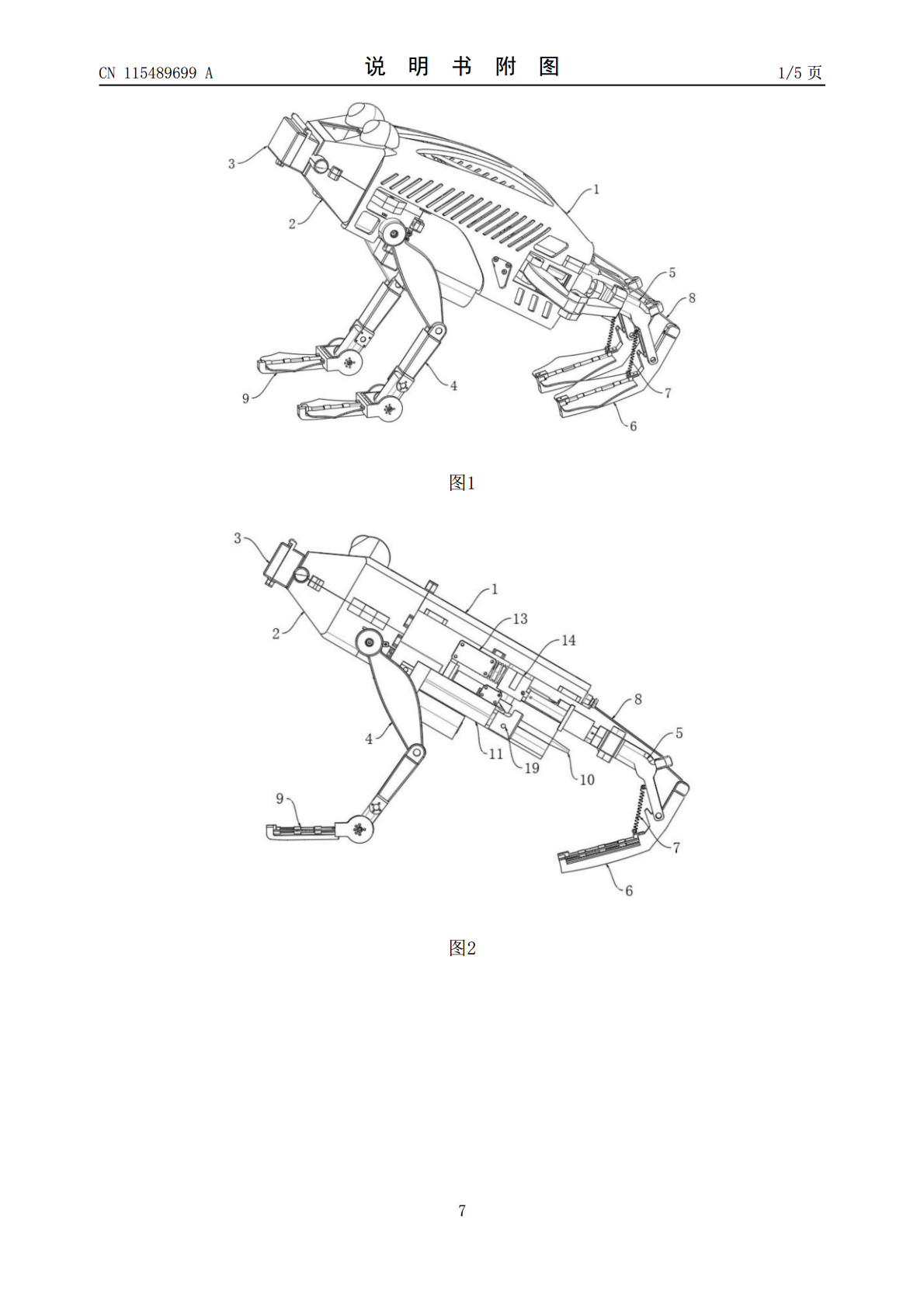
本发明公开了仿生青蛙海边救援机器人,包括躯体,躯体的前侧设有头部,躯体的前部设有前腿,躯体的后部设有后腿,所述躯体的内部设有用于驱动后腿移动的驱动组件,驱动组件包括与躯体内壁相连接的电动推杆,电动推杆的输出端连接有推拉块;所述后腿的端部通过连接件连接有移动件,移动件的下侧设有能够上下移动的楔形块;所述电动推杆的上侧设有安装件,安装件的侧部设有滚轮;所述躯体的内壁设有固定件,固定件与移动件之间通过复位弹簧相连接;所述后腿的端部铰接有后掌。本发明的结构更加简单,设计难度更低,更加容易适应复杂的水下环境,从而给
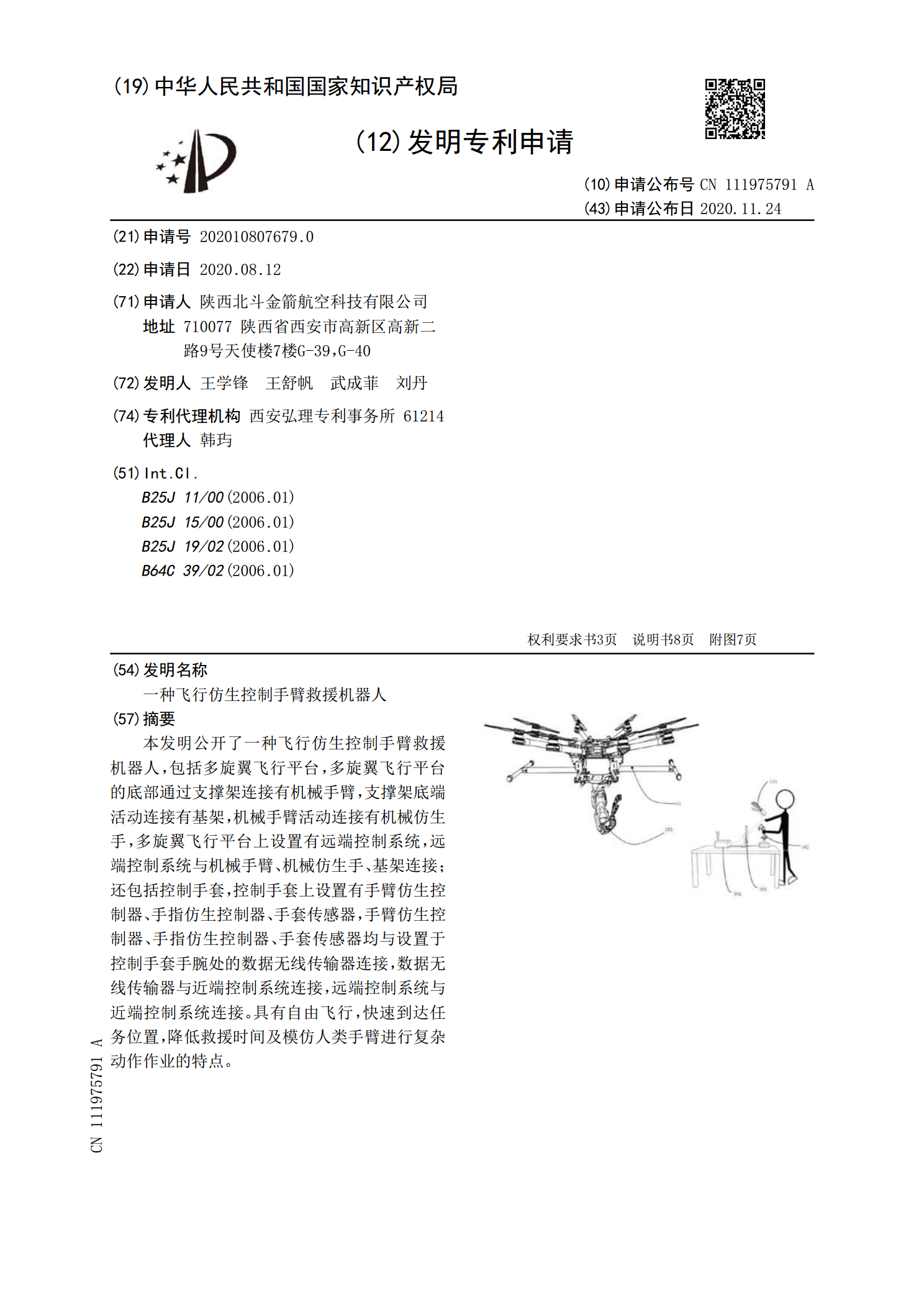
一种飞行仿生控制手臂救援机器人.pdf
本发明公开了一种飞行仿生控制手臂救援机器人,包括多旋翼飞行平台,多旋翼飞行平台的底部通过支撑架连接有机械手臂,支撑架底端活动连接有基架,机械手臂活动连接有机械仿生手,多旋翼飞行平台上设置有远端控制系统,远端控制系统与机械手臂、机械仿生手、基架连接;还包括控制手套,控制手套上设置有手臂仿生控制器、手指仿生控制器、手套传感器,手臂仿生控制器、手指仿生控制器、手套传感器均与设置于控制手套手腕处的数据无线传输器连接,数据无线传输器与近端控制系统连接,远端控制系统与近端控制系统连接。具有自由飞行,快速到达任务位置,
仿生青蛙原理.pdf
仿生青蛙原理一、引言仿生学是一门研究生物系统结构和功能的学科,通过模仿自然界中的生物,设计出具有相似功能的机械装置。其中,仿生青蛙是一种利用仿生学原理设计而成的机器人,能够在水中进行自由游动并完成多项任务。本文将介绍仿生青蛙的原理及其实现方式。二、仿生青蛙结构1.外形结构仿生青蛙的外形与真实青蛙相似,包括头部、身体和四肢。其中,头部为传感器和控制系统的集成区域;身体为电池、电机和其他电子元件的安装区域;四肢为推进器官。2.推进器官仿生青蛙使用四肢进行游泳。每个肢节由一个舵机驱动,并通过连杆连接到推进器上。

救援机器人仿生感知技术研究的任务书.docx
救援机器人仿生感知技术研究的任务书任务书一、任务背景在灾害救援中,人工干预往往效率不高,而且危险性高。救援机器人可以替代人进行救援,能够提高救援效率和减少人员伤亡,因此得到了越来越多的关注和研究。然而,目前的救援机器人在仿生感知技术方面还有待进一步完善。因此,本项目拟研究救援机器人仿生感知技术,以提高其自主决策和适应环境的能力。二、研究目标本研究旨在开发一种救援机器人仿生感知技术,使其具备以下能力:1.精准的环境识别和目标检测能力:救援机器人能够通过视觉、听觉等多种感知方式精准地感知环境和目标,从而更好地

站在海边的青蛙.doc
站在海边的青蛙蒋媛还是从2003年说起吧,那年师范刚毕业的我,总认为凭着所学应付一群毛孩子辍辍有余,然而真正站到了三尺讲台,才发现我错了。严密的课堂结构,丰富的课堂内容,华丽的语言表达,是我一直最为崇拜的授课方式,然而这一切的努力却只是将课堂变成一台自我陶醉的独角戏舞台,我似乎只是一个孤独的演员。当各种表演都无法改变学生们的一脸茫然时,我已是黔驴技穷,并陷入了深深的反思。我深感自己知识储备的匮乏,面对一双双求知若渴的眼晴,我很是惭愧。认真的备课,勤奋的批阅,始终不能让我摆脱内