
防刮伤晶圆盒.pdf

又珊****ck

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
防刮伤晶圆盒.pdf
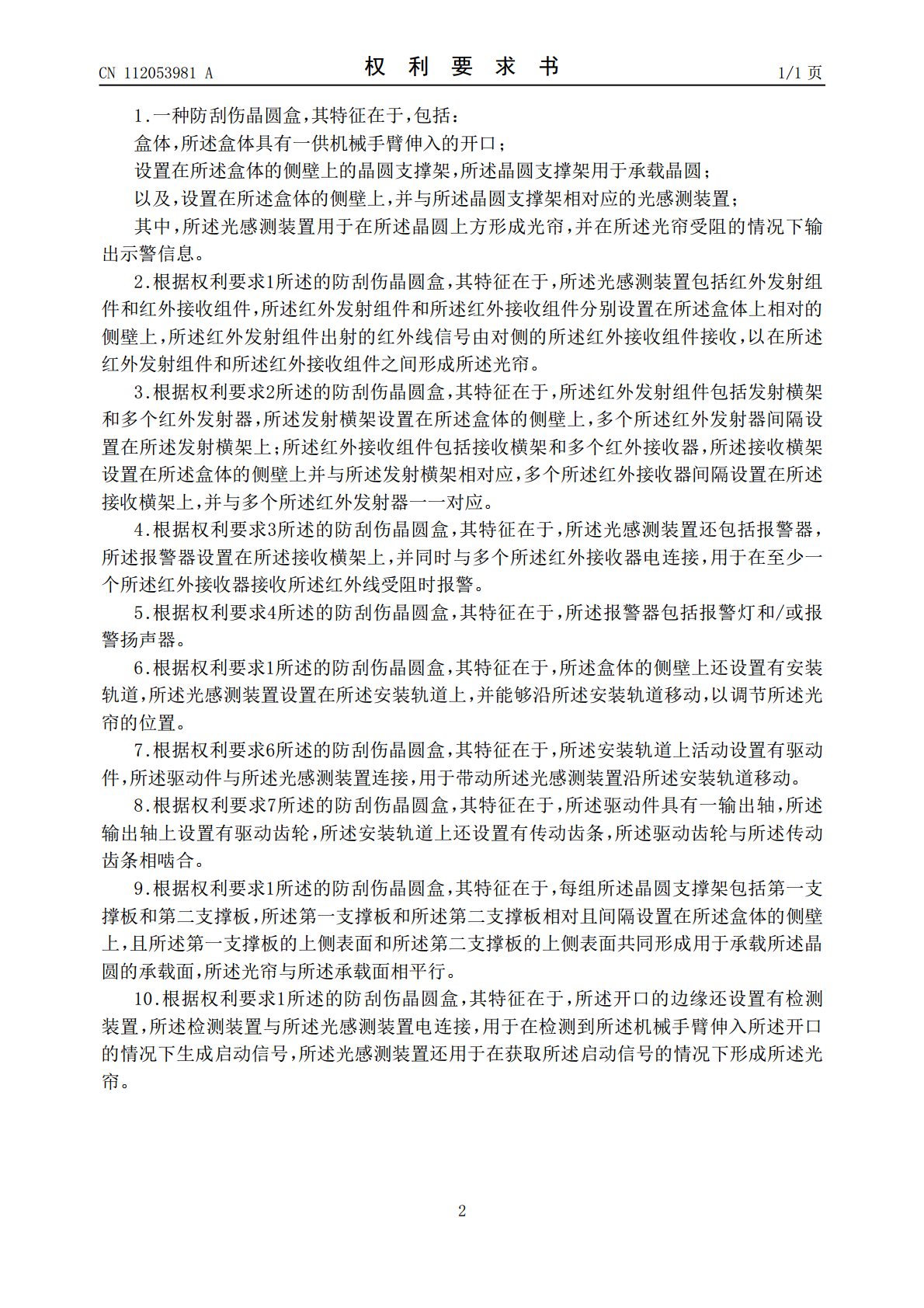
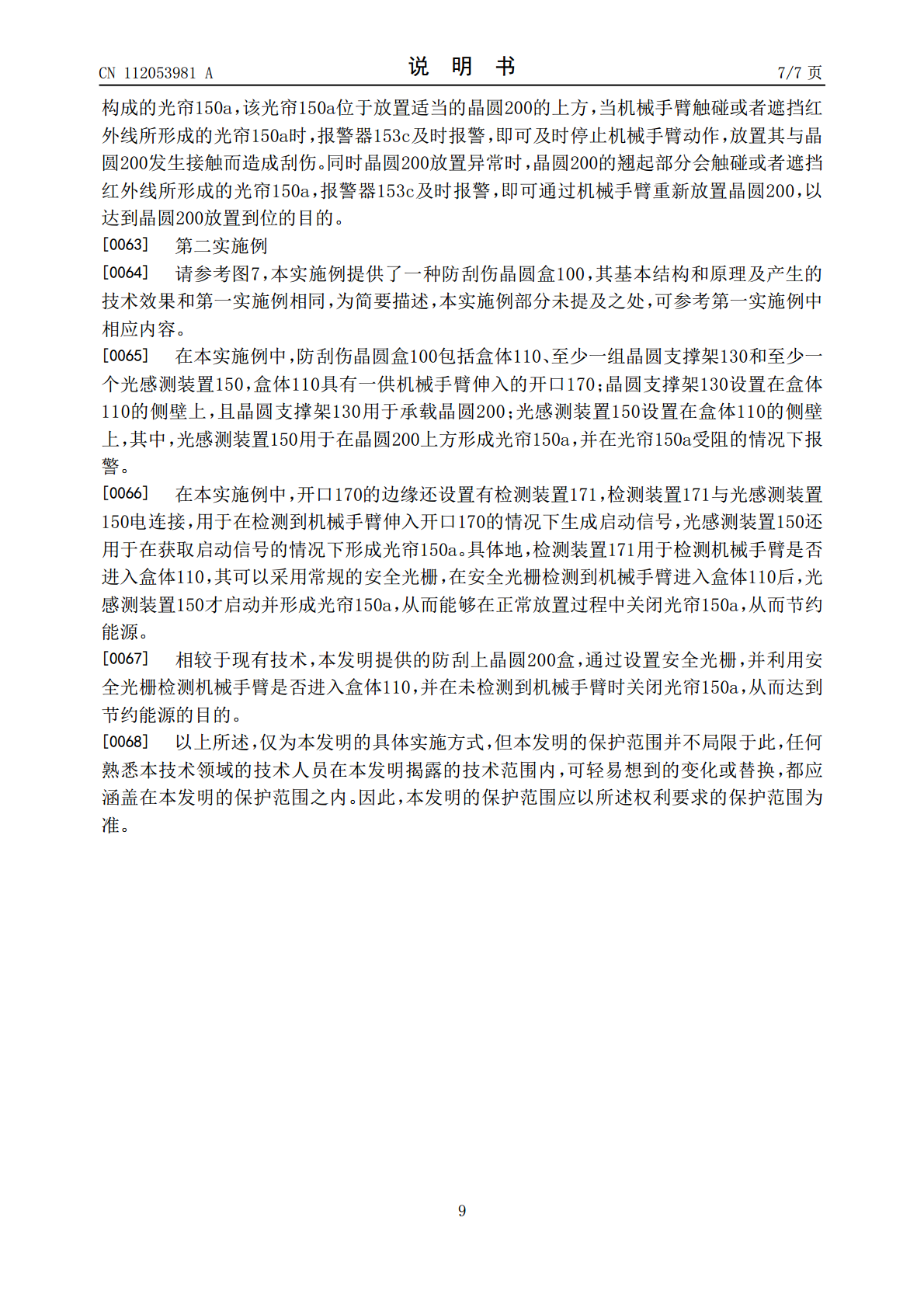
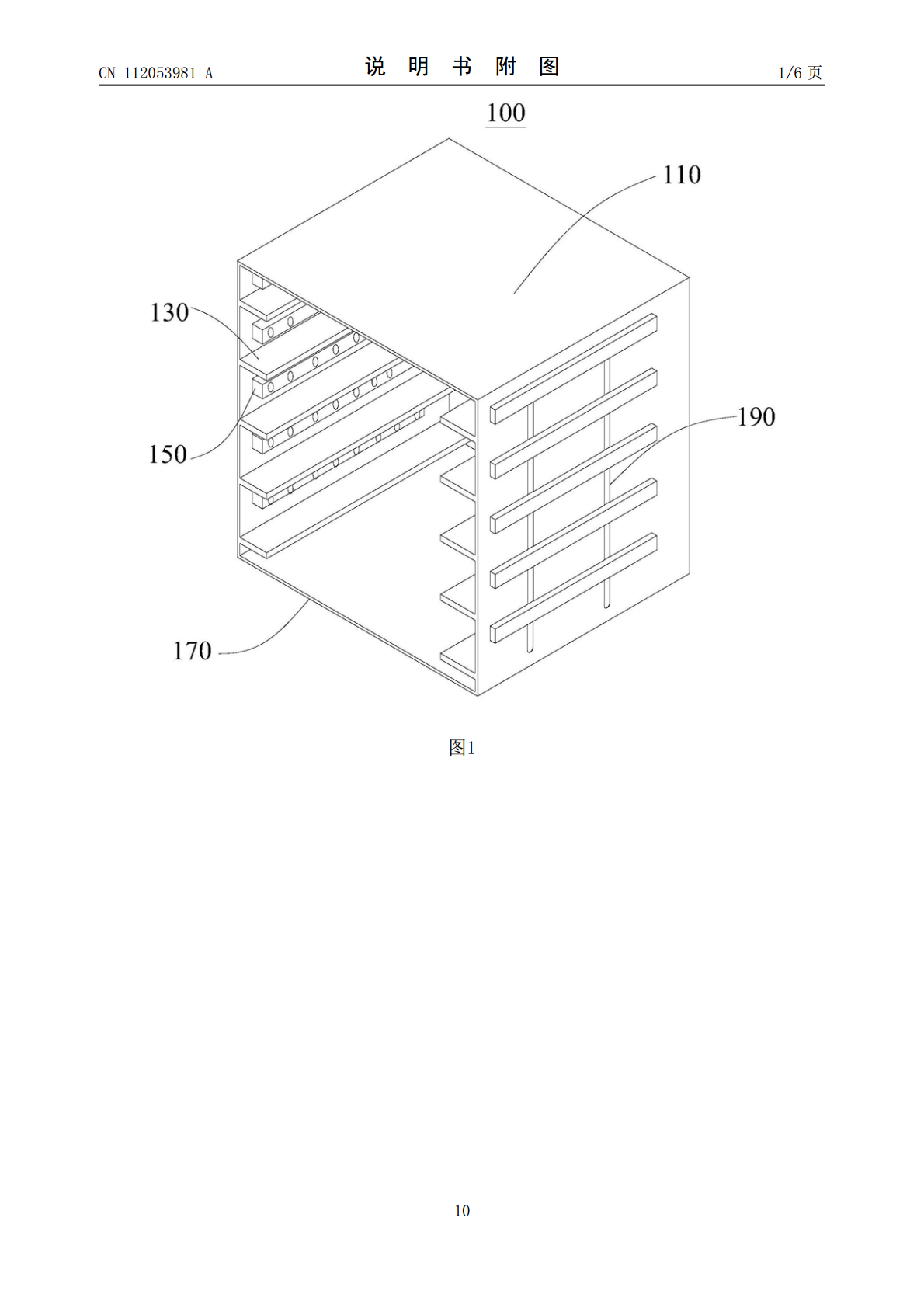
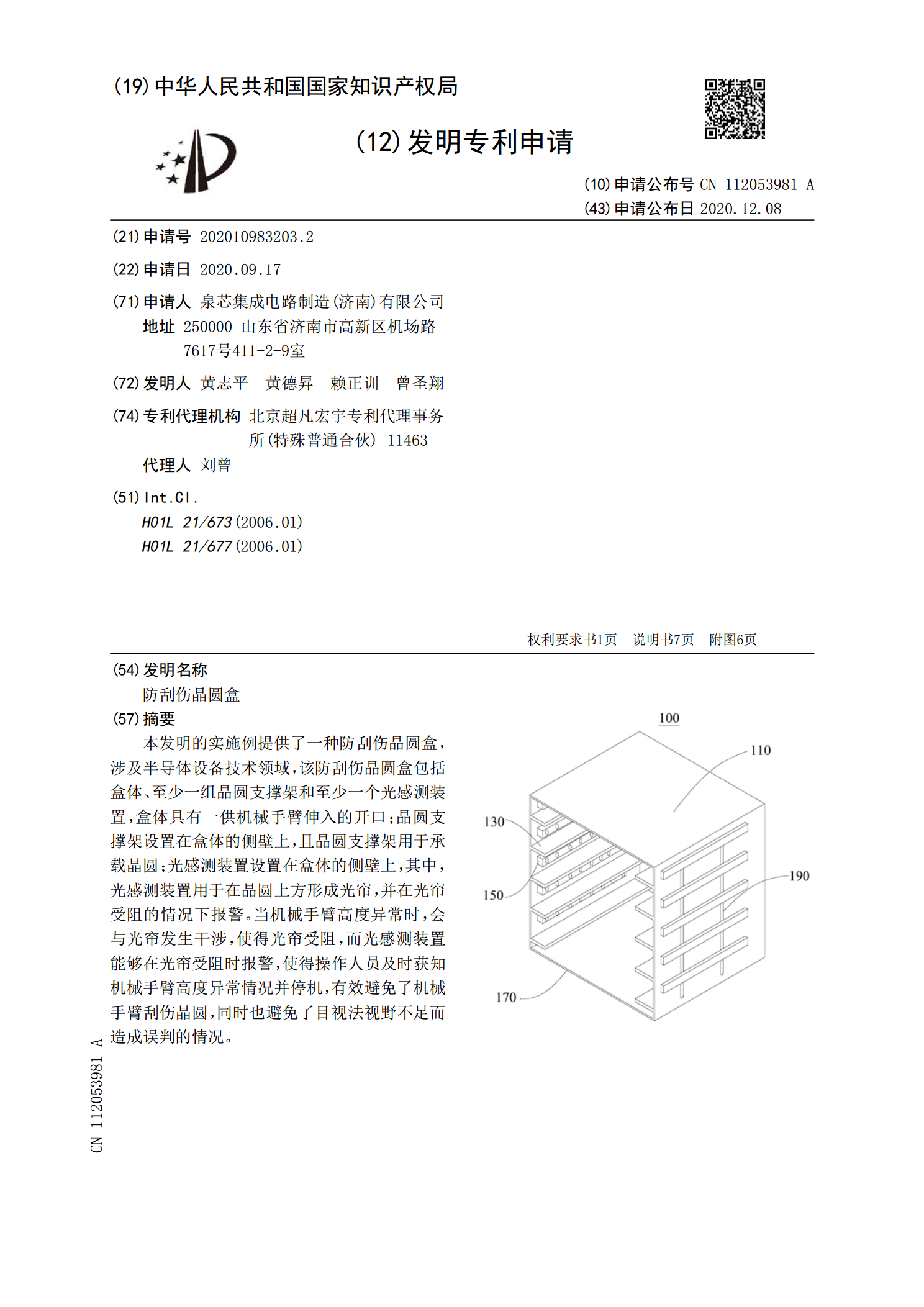
本发明的实施例提供了一种防刮伤晶圆盒,涉及半导体设备技术领域,该防刮伤晶圆盒包括盒体、至少一组晶圆支撑架和至少一个光感测装置,盒体具有一供机械手臂伸入的开口;晶圆支撑架设置在盒体的侧壁上,且晶圆支撑架用于承载晶圆;光感测装置设置在盒体的侧壁上,其中,光感测装置用于在晶圆上方形成光帘,并在光帘受阻的情况下报警。当机械手臂高度异常时,会与光帘发生干涉,使得光帘受阻,而光感测装置能够在光帘受阻时报警,使得操作人员及时获知机械手臂高度异常情况并停机,有效避免了机械手臂刮伤晶圆,同时也避免了目视法视野不足而造成误判
晶圆盒.pdf
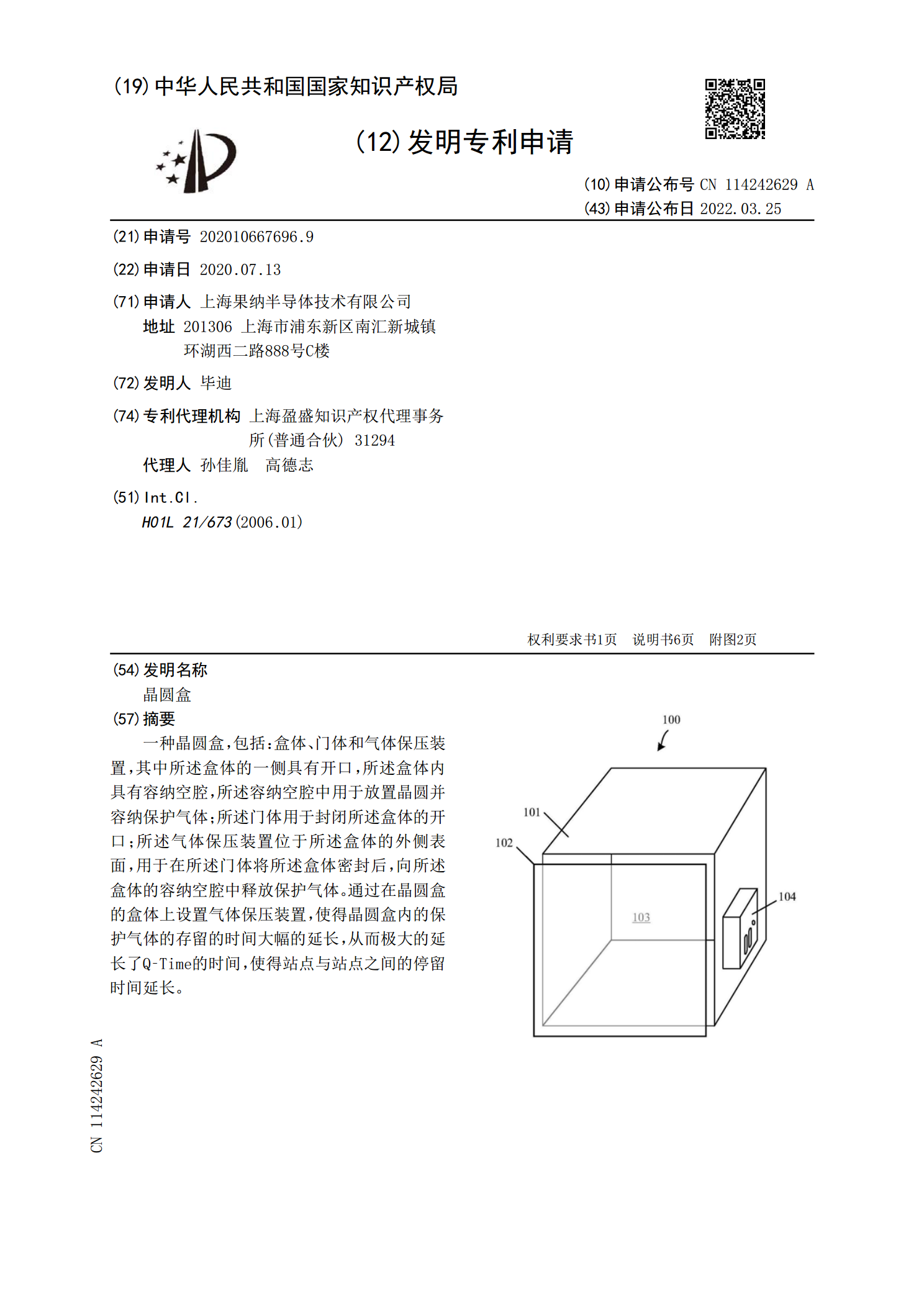
一种晶圆盒,包括:盒体、门体和气体保压装置,其中所述盒体的一侧具有开口,所述盒体内具有容纳空腔,所述容纳空腔中用于放置晶圆并容纳保护气体;所述门体用于封闭所述盒体的开口;所述气体保压装置位于所述盒体的外侧表面,用于在所述门体将所述盒体密封后,向所述盒体的容纳空腔中释放保护气体。通过在晶圆盒的盒体上设置气体保压装置,使得晶圆盒内的保护气体的存留的时间大幅的延长,从而极大的延长了Q‑Time的时间,使得站点与站点之间的停留时间延长。

晶圆盒、晶圆传送系统及晶圆传送方法.pdf
本申请涉及半导体制备技术领域,特别是涉及一种晶圆盒、晶圆传送系统及晶圆传送方法,该晶圆盒包括:盒体、晶圆扫描装置、盒盖。盒体上设有与盒体内部相连通的开口。晶圆扫描装置包括第一晶圆扫描装置,晶圆扫描装置设置于盒体的内壁上,用于扫描盒体内晶圆的存放情况。盒盖扣设于开口处。晶圆盒的盒体的内壁上设有晶圆扫描装置,晶圆扫描装置实时扫描确认晶圆盒内的晶圆的存放情况。取代了晶圆盒每次上机台时,都需要机台的机械手臂对晶圆盒中的晶圆进行扫描,确认晶圆盒内的晶圆的存放情况。如此,可以节约大量时间,进而提高产能。并且,无需购买
一种防刮伤利器盒.pdf
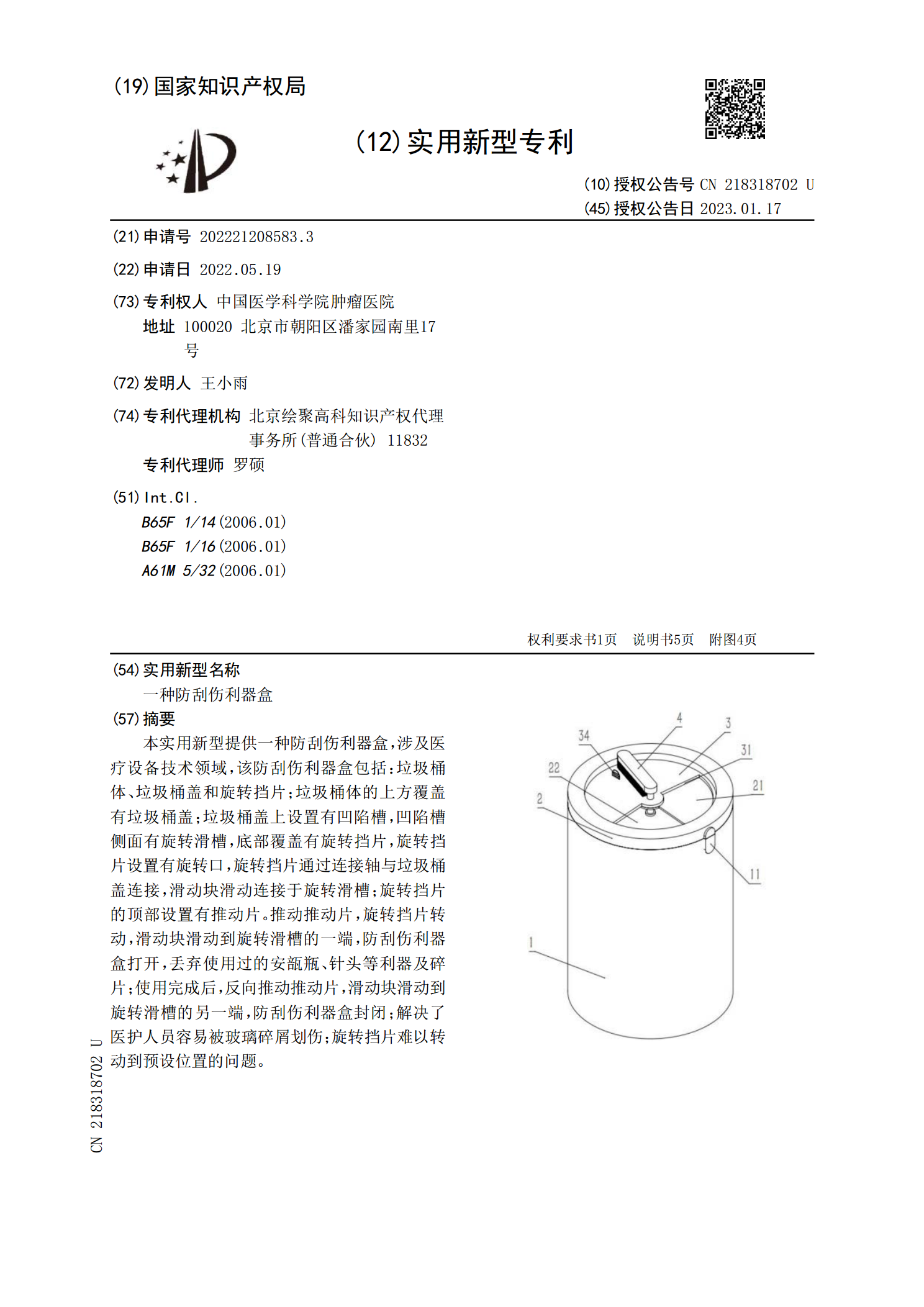
本实用新型提供一种防刮伤利器盒,涉及医疗设备技术领域,该防刮伤利器盒包括:垃圾桶体、垃圾桶盖和旋转挡片;垃圾桶体的上方覆盖有垃圾桶盖;垃圾桶盖上设置有凹陷槽,凹陷槽侧面有旋转滑槽,底部覆盖有旋转挡片,旋转挡片设置有旋转口,旋转挡片通过连接轴与垃圾桶盖连接,滑动块滑动连接于旋转滑槽;旋转挡片的顶部设置有推动片。推动推动片,旋转挡片转动,滑动块滑动到旋转滑槽的一端,防刮伤利器盒打开,丢弃使用过的安瓿瓶、针头等利器及碎片;使用完成后,反向推动推动片,滑动块滑动到旋转滑槽的另一端,防刮伤利器盒封闭;解决了医护人员
晶圆盒、晶圆搬运设备、晶圆搬运控制方法、电气设备及存储介质.pdf
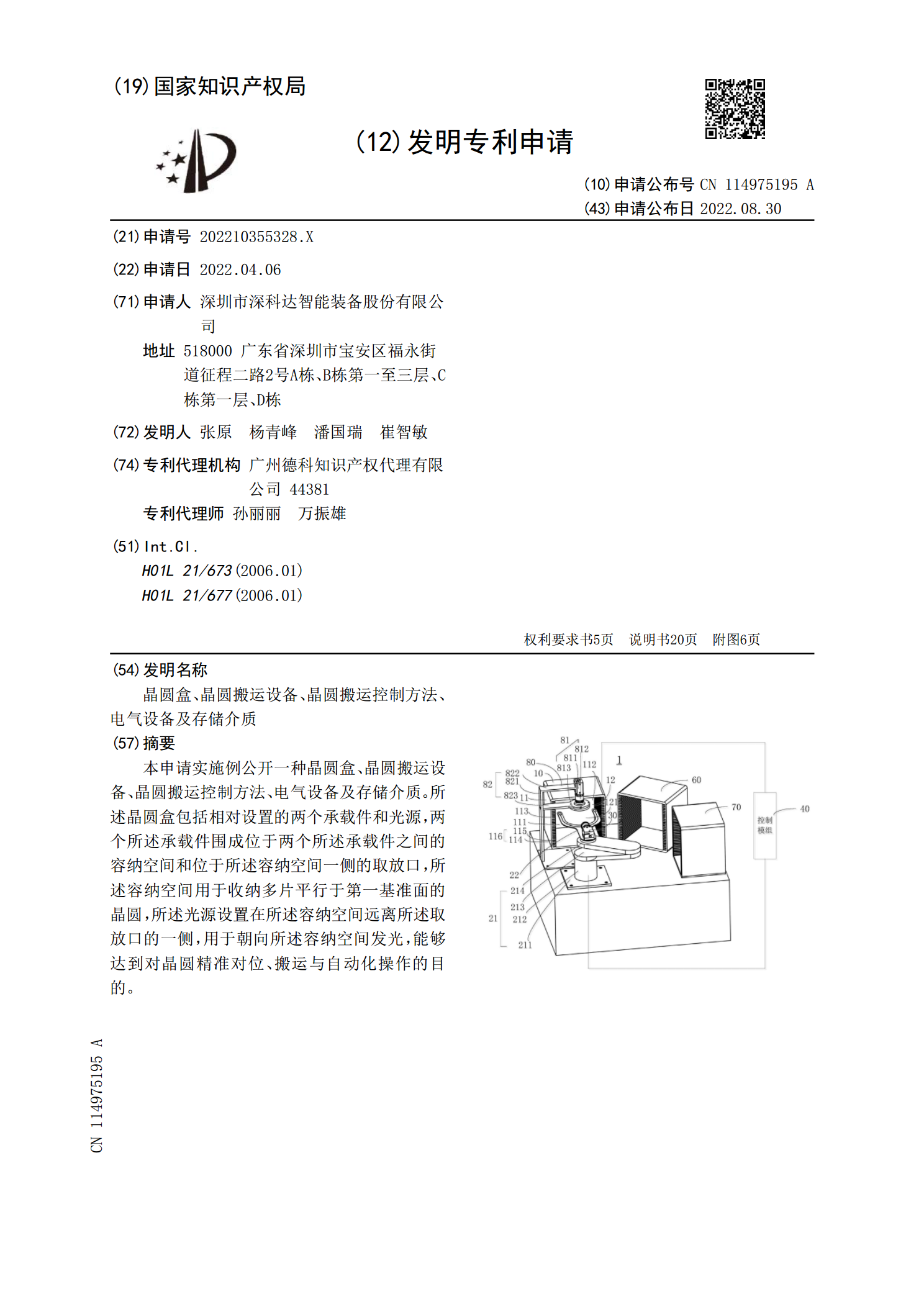
本申请实施例公开一种晶圆盒、晶圆搬运设备、晶圆搬运控制方法、电气设备及存储介质。所述晶圆盒包括相对设置的两个承载件和光源,两个所述承载件围成位于两个所述承载件之间的容纳空间和位于所述容纳空间一侧的取放口,所述容纳空间用于收纳多片平行于第一基准面的晶圆,所述光源设置在所述容纳空间远离所述取放口的一侧,用于朝向所述容纳空间发光,能够达到对晶圆精准对位、搬运与自动化操作的目的。