
晶圆盒、晶圆搬运设备、晶圆搬运控制方法、电气设备及存储介质.pdf

一只****ua

1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
晶圆盒、晶圆搬运设备、晶圆搬运控制方法、电气设备及存储介质.pdf
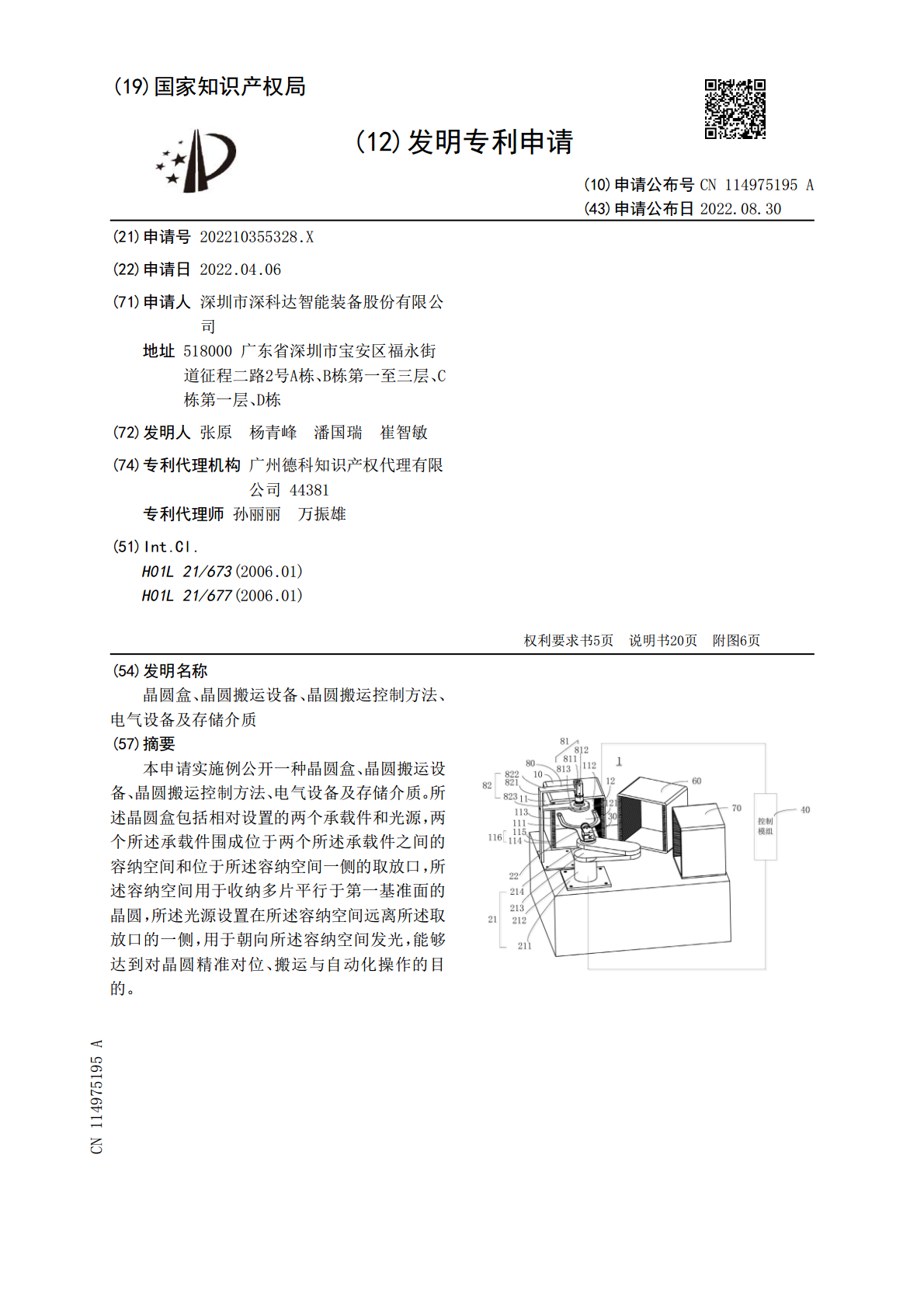
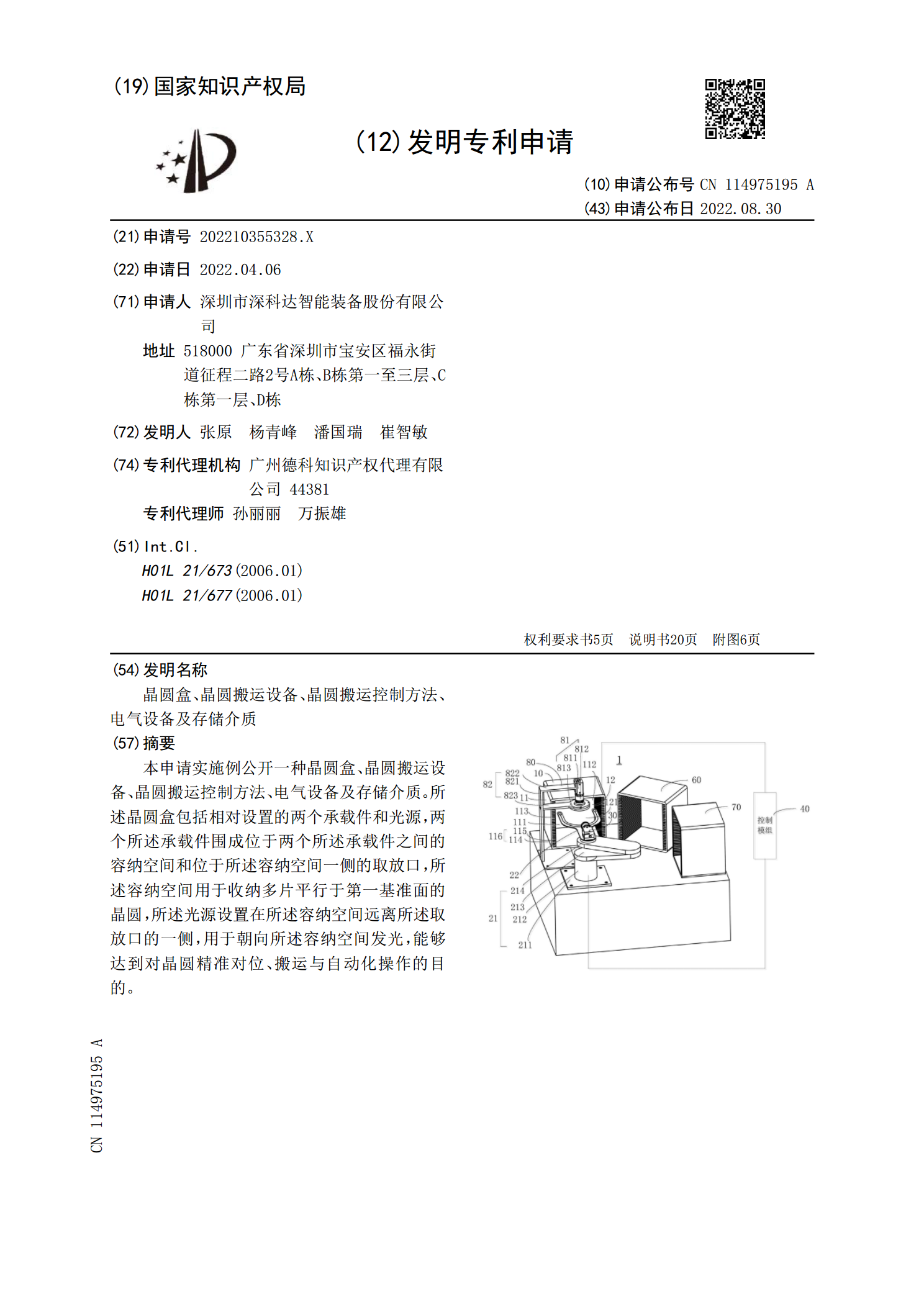
本申请实施例公开一种晶圆盒、晶圆搬运设备、晶圆搬运控制方法、电气设备及存储介质。所述晶圆盒包括相对设置的两个承载件和光源,两个所述承载件围成位于两个所述承载件之间的容纳空间和位于所述容纳空间一侧的取放口,所述容纳空间用于收纳多片平行于第一基准面的晶圆,所述光源设置在所述容纳空间远离所述取放口的一侧,用于朝向所述容纳空间发光,能够达到对晶圆精准对位、搬运与自动化操作的目的。

晶圆搬运装置.pdf
本发明公开了一种晶圆搬运装置,包括在升降机构作用下能升降移动的伸缩旋转机构,伸缩旋转机构包括旋转部、伸缩部及末端执行器;旋转部用以带动伸缩部旋转,以使位于伸缩部上的末端执行器能朝向晶舟或晶圆盒;伸缩部用以带动末端执行器伸出或缩回,以使末端执行器能进入到晶舟或晶圆盒内取放晶圆;末端执行器包括一一对应设置的片叉、片叉安装板,片叉安装板上设有角度调节机构;角度调节机构包括能沿片叉长度方向移动的第二调节板,第二调节板的上端设有与片叉固接的第一平面,下端设有能沿片叉安装板滑移的第一弧面;片叉安装板上设有供第一弧面滑

晶圆盒、晶圆传送系统及晶圆传送方法.pdf
本申请涉及半导体制备技术领域,特别是涉及一种晶圆盒、晶圆传送系统及晶圆传送方法,该晶圆盒包括:盒体、晶圆扫描装置、盒盖。盒体上设有与盒体内部相连通的开口。晶圆扫描装置包括第一晶圆扫描装置,晶圆扫描装置设置于盒体的内壁上,用于扫描盒体内晶圆的存放情况。盒盖扣设于开口处。晶圆盒的盒体的内壁上设有晶圆扫描装置,晶圆扫描装置实时扫描确认晶圆盒内的晶圆的存放情况。取代了晶圆盒每次上机台时,都需要机台的机械手臂对晶圆盒中的晶圆进行扫描,确认晶圆盒内的晶圆的存放情况。如此,可以节约大量时间,进而提高产能。并且,无需购买
一种晶圆盒搬运装置.pdf
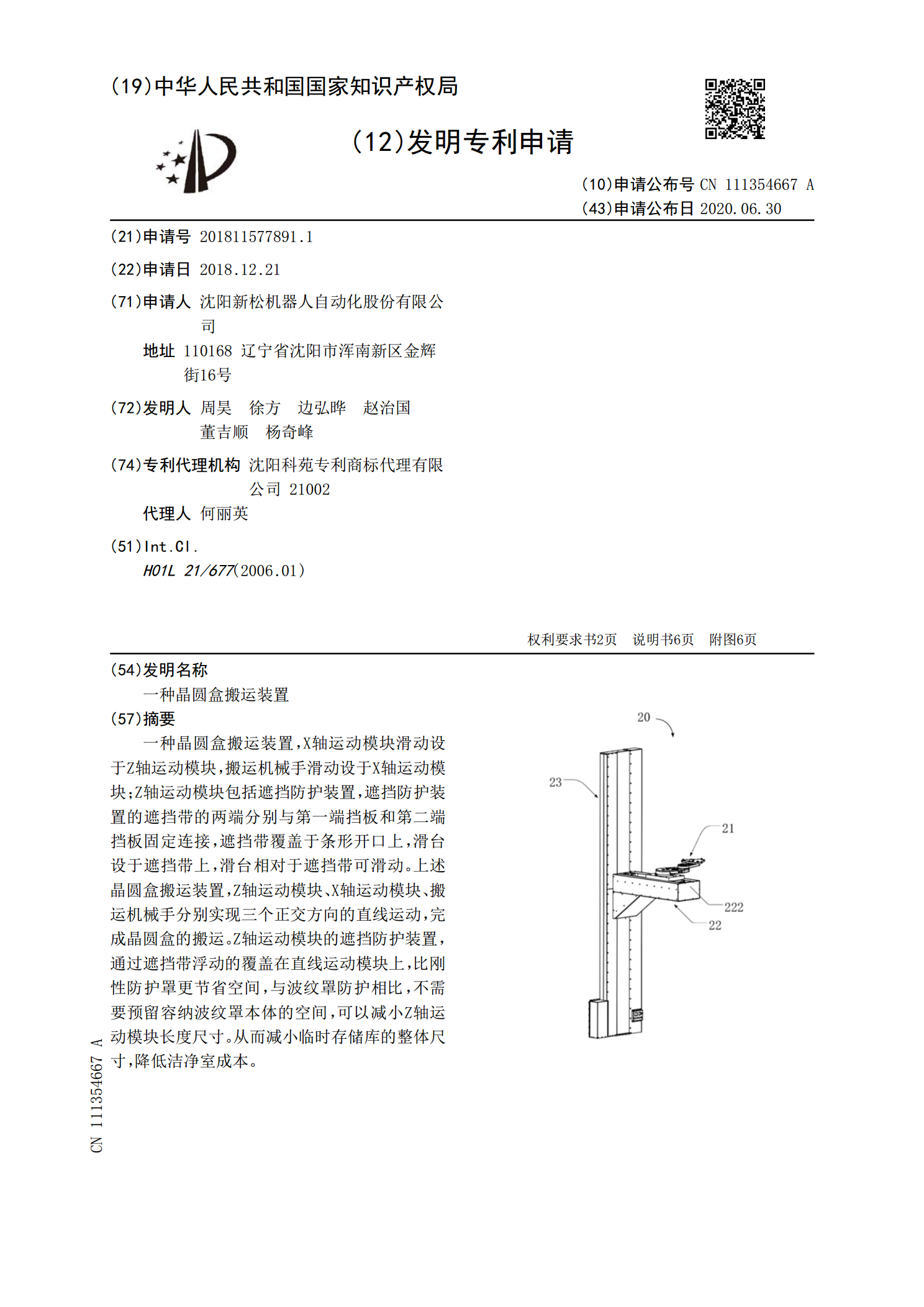
一种晶圆盒搬运装置,X轴运动模块滑动设于Z轴运动模块,搬运机械手滑动设于X轴运动模块;Z轴运动模块包括遮挡防护装置,遮挡防护装置的遮挡带的两端分别与第一端挡板和第二端挡板固定连接,遮挡带覆盖于条形开口上,滑台设于遮挡带上,滑台相对于遮挡带可滑动。上述晶圆盒搬运装置,Z轴运动模块、X轴运动模块、搬运机械手分别实现三个正交方向的直线运动,完成晶圆盒的搬运。Z轴运动模块的遮挡防护装置,通过遮挡带浮动的覆盖在直线运动模块上,比刚性防护罩更节省空间,与波纹罩防护相比,不需要预留容纳波纹罩本体的空间,可以减小Z轴运动

晶圆卡盘、晶圆测试设备及晶圆打点方法.pdf
本发明公开了一种晶圆卡盘,用于配合点墨结构使用以对晶圆进行打点,其包括用于承载晶圆的卡盘本体和装设在卡盘本体的调试件,调试件的上表面形成有用于供点墨结构打点的调试区域,以调试点墨结构所形成的墨点的大小和厚度;本发明在不会在晶圆上留下墨点印记的情况下实现了墨点的大小和厚度调试,在调试完成后无需对晶圆上的墨点擦除,避免了刮伤晶圆,确保了晶圆能够符合出货要求;也无需使用工程调试片,节约了成本。另,本发明还公开一种晶圆测试设备及晶圆打点方法。