
可拖挂重型载运车的转向控制方法.pdf

冬易****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

可拖挂重型载运车的转向控制方法.pdf
本发明公开了一种可拖挂重型载运车的转向控制方法,包括:接收用户的控制指令以确定当前转向模式;利用每个轮组上安装的角度传感器采集相应位置的初始转向角信息;根据目标传感信息、当前车速,所有初始转向角信息生成操作指令;主控制器将操作指令分解为能被转向系统中各个部件执行的子命令;转向系统中各个部件响应于与其对应的子命令以使可拖挂重型载运车能按照当前转向模式进行行驶。本发明轮组每轴线转向机构上均布置了角度传感器,角度传感器可以实现感知各轴线的转向角度,上传角度信号到控制器,控制器根据三个轴线各种的角度状态,发出控制

拖挂车转向控制方法、控制器、拖挂车转向系统及拖挂车.pdf
拖挂车转向控制方法,包括:第一,控制牵引车的前轮转向,并获取牵引车前轮中的转向内侧前轮的偏转角θ1以及牵引车纵向中心竖直平面与挂车纵向中心竖直平面之间的夹角α;第二,控制拖挂车的其它各对转向轮转向,其中,使得牵引车上的其它各内侧转向轮的偏转角arctan((Li/L1)·tanθ1)-3°≤θi≤arctan((Li/L1)·tanθ1)+3°;并且使得挂车上的各内侧转向轮的偏转角α-arctan(Z/P)-3°≤θj≤α-arctan(Z/P)+3°。此外,本发明还提供一种控制器、拖挂车转向系统以及拖挂
一种挂车可主动转向、驱动、制动的拖挂车及其控制方法.pdf
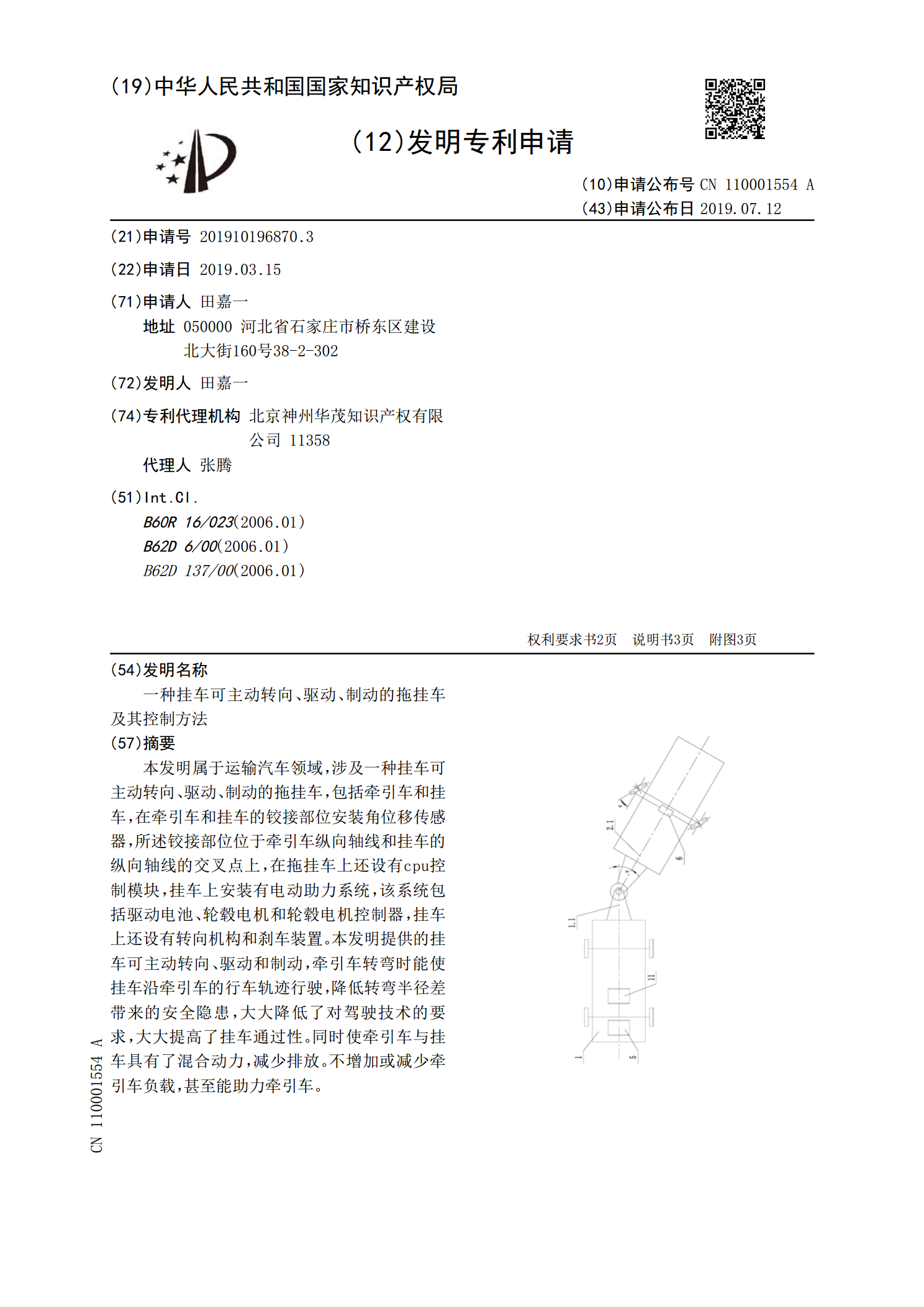
本发明属于运输汽车领域,涉及一种挂车可主动转向、驱动、制动的拖挂车,包括牵引车和挂车,在牵引车和挂车的铰接部位安装角位移传感器,所述铰接部位位于牵引车纵向轴线和挂车的纵向轴线的交叉点上,在拖挂车上还设有cpu控制模块,挂车上安装有电动助力系统,该系统包括驱动电池、轮毂电机和轮毂电机控制器,挂车上还设有转向机构和刹车装置。本发明提供的挂车可主动转向、驱动和制动,牵引车转弯时能使挂车沿牵引车的行车轨迹行驶,降低转弯半径差带来的安全隐患,大大降低了对驾驶技术的要求,大大提高了挂车通过性。同时使牵引车与挂车具有了

正交双向载运车及其控制方法.pdf
本发明公开了一种正交双向载运车及其工作方法,正交双向载运车包含底盘、横向行走模块、纵向行走模块、切换模块和控制模块;通过横向行走模块中的第一至第三横向传动齿轮以及第一至第二横向从动齿轮,将横向传动轴的位置调整到高处,与纵向传动轴、纵向从动轴错开,呈正交形态。工作时,通过切换模块调整纵向行走模块的位置来控制正交双向载运车进行横向运动或纵向运动。本发明转向灵活,机动性高,无需原地转向和调节姿态,无需采用全方位车轮,具有广泛的运用前景。

被拖挂车转向时其转向桥和后桥可平行的连接转向机构.pdf
被拖挂车转向时其转向桥和后桥可平行的连接转向机构是属于机动车前车和被拖挂车之间的连接机构及被拖挂车的底盘机构这个技术领域,它解决了传统被拖挂车转向时其后桥与其转向桥不可相互平行,且被拖挂车车厢不能够进行多节(大于两节)拖挂,解决这些问题可增加被拖挂车行驶的安全性及增加被拖挂车车身数量,每个车轮也可装上电动车轮,提高运载能力,具有深远的历史意义;技术要领:在前车身架末端与被拖挂车之间设立万向轴总成,设立一转向桥、二转向桥,它们都是用转向拉杆等相锁住而转动的,可适应前车身架和被拖挂车身架的上下跳动、左右转向,