
一种搬运装置及其搬运方法.pdf

一吃****福乾

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种搬运装置及其搬运方法.pdf
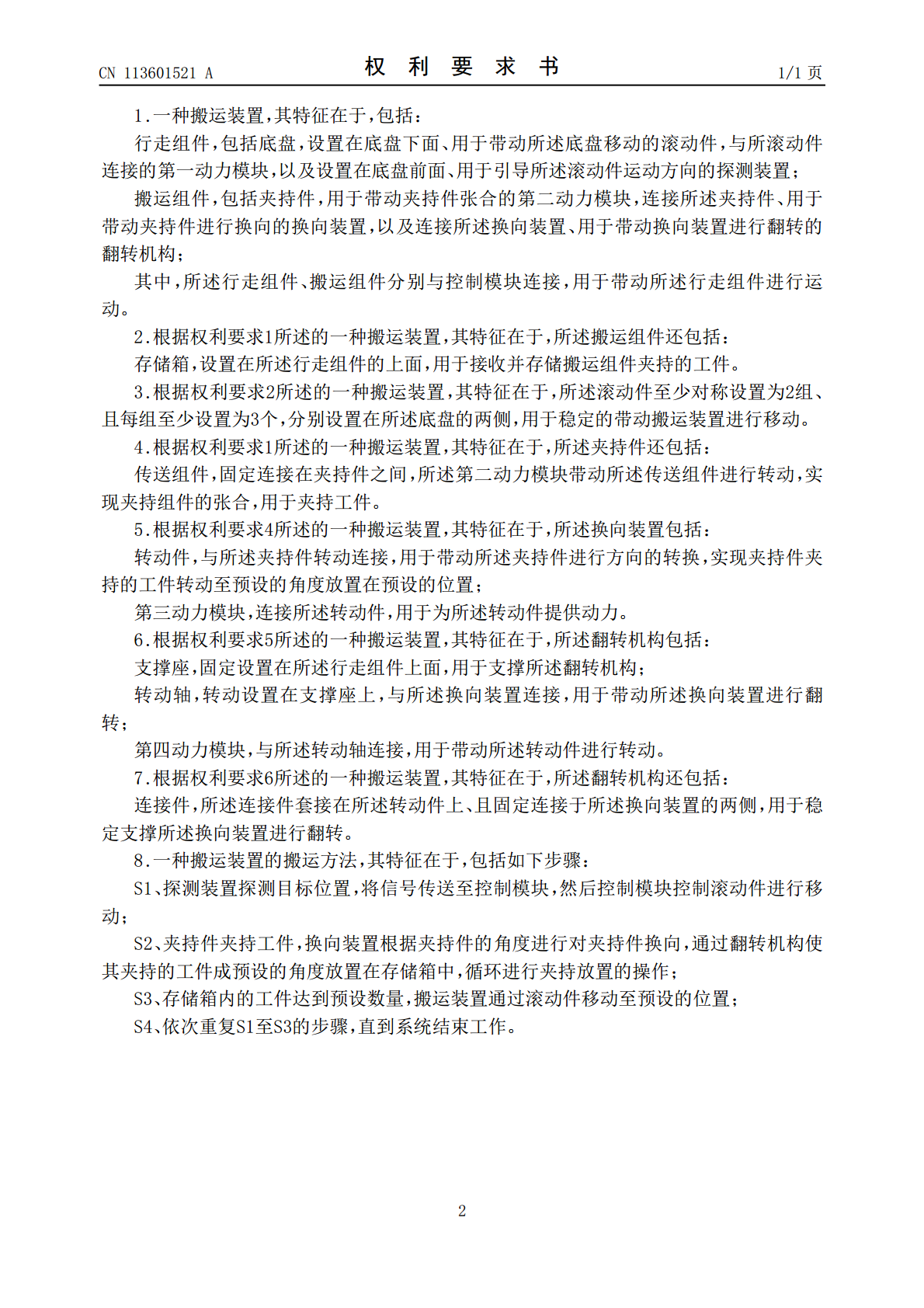
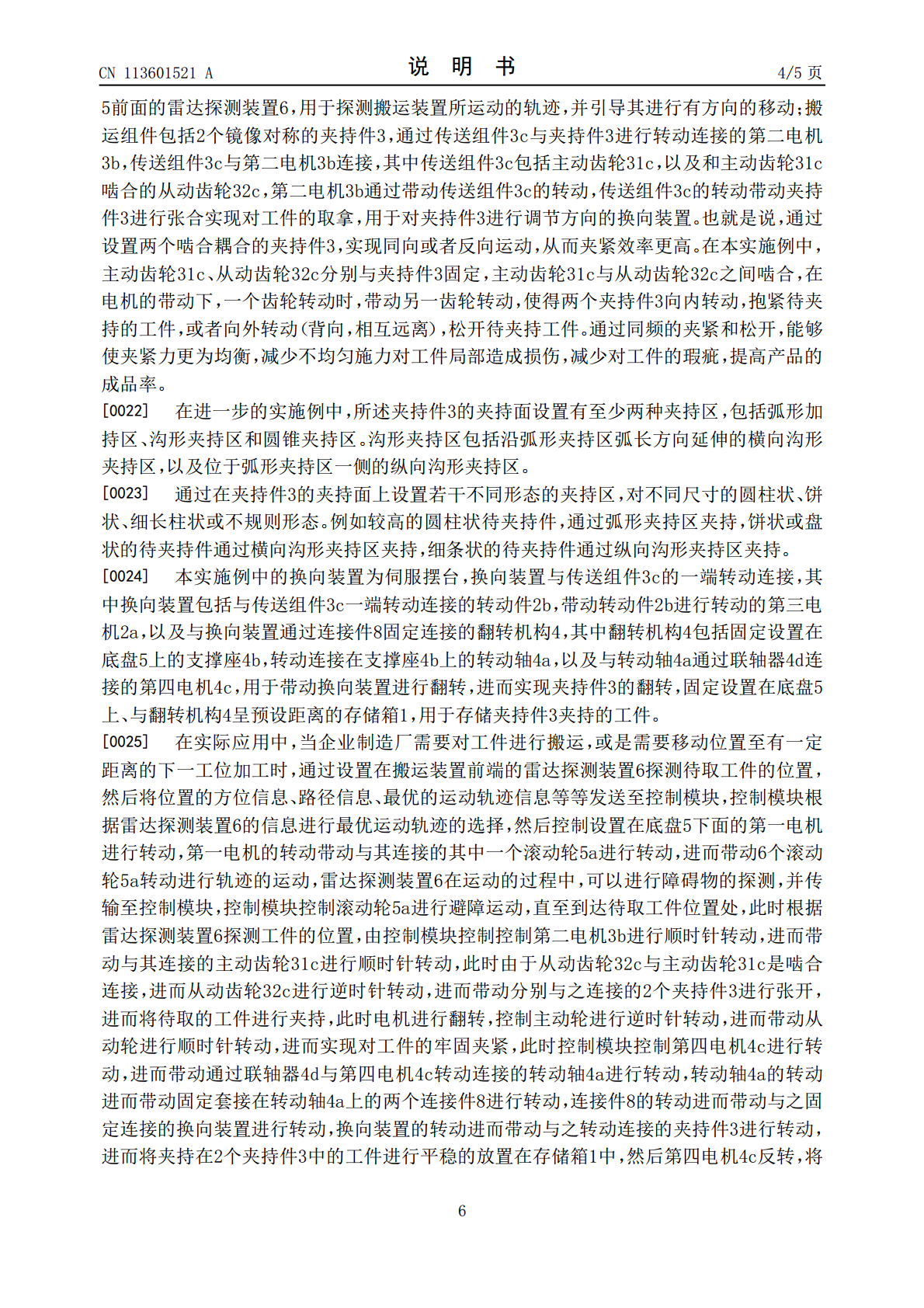
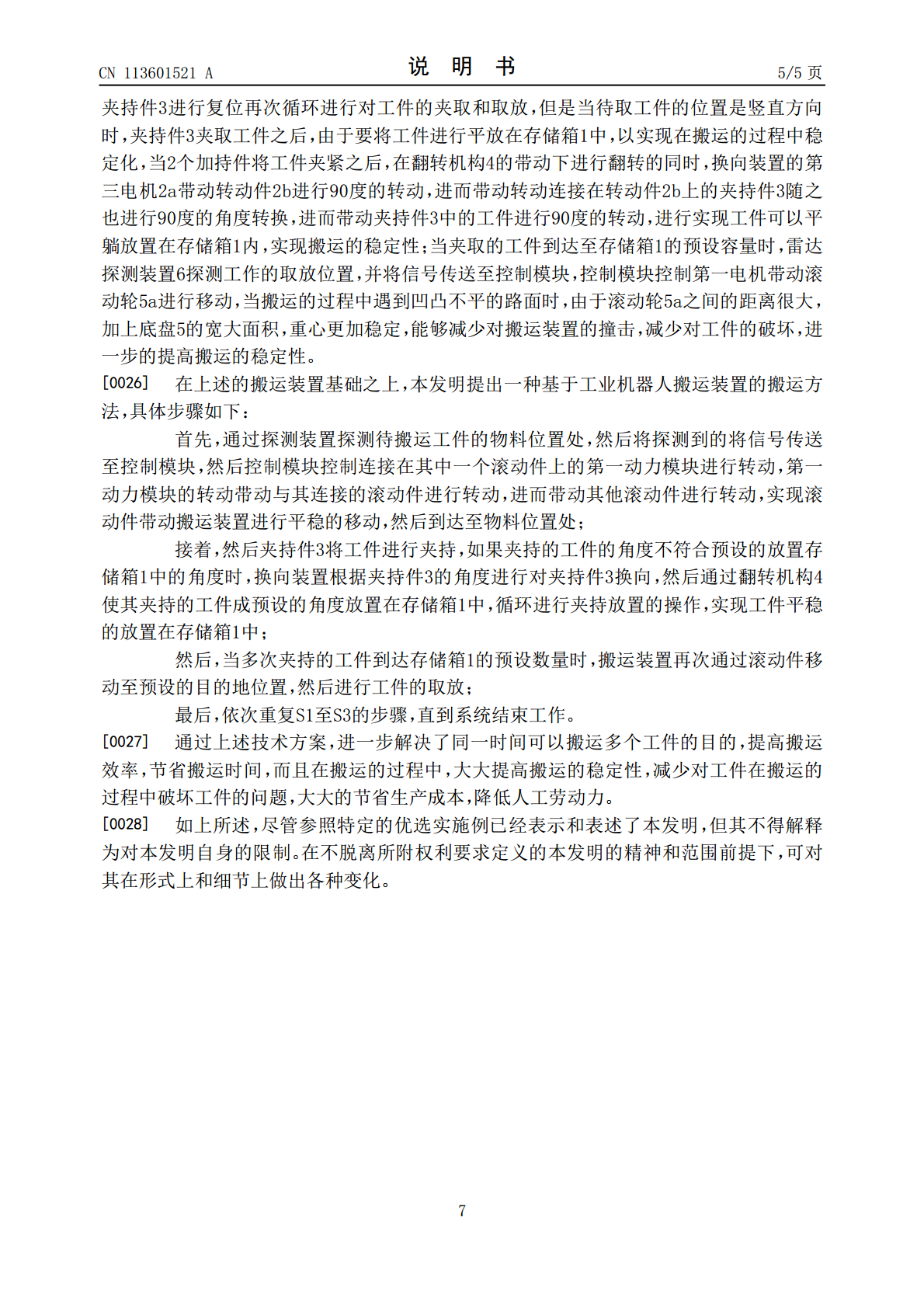
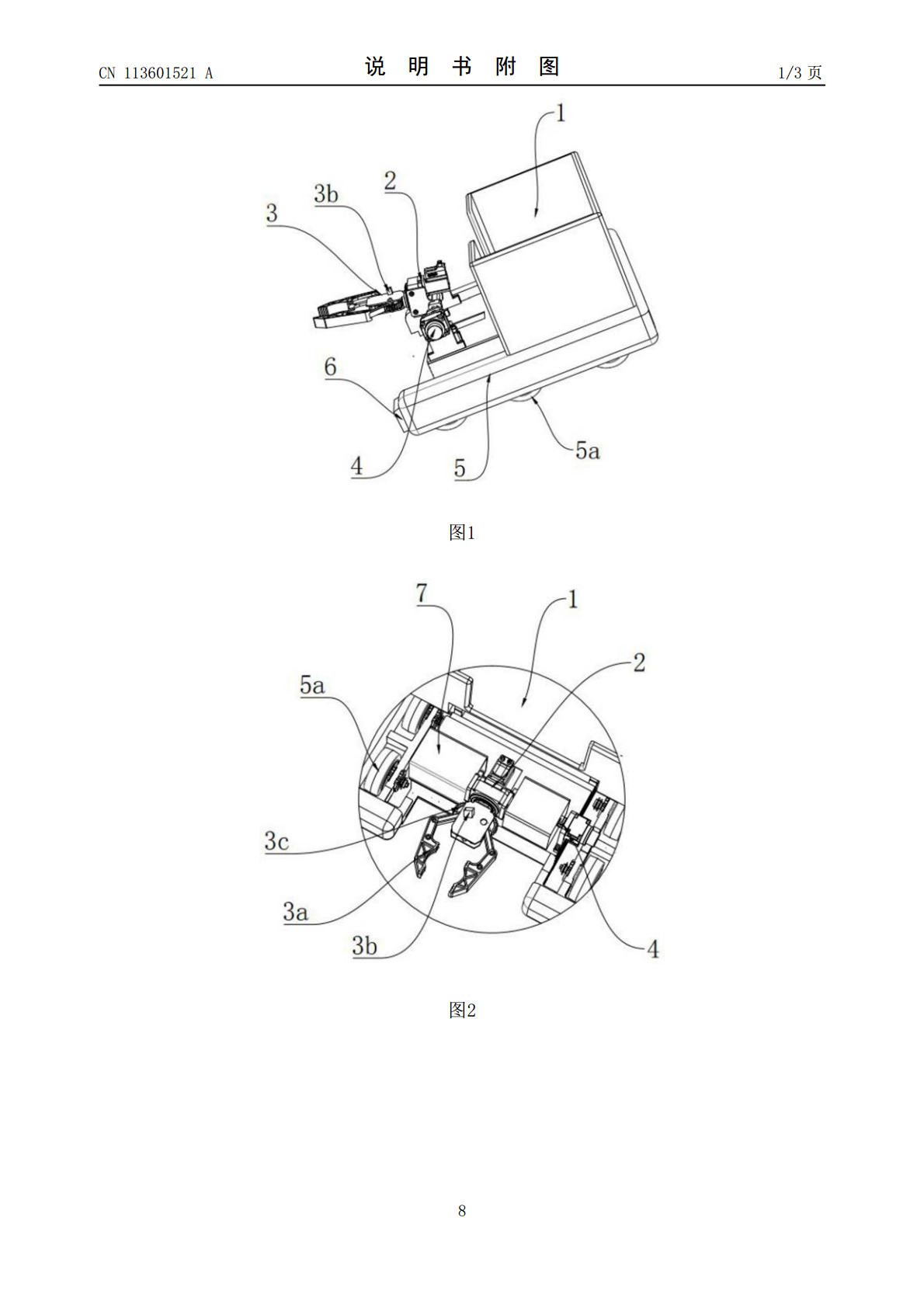
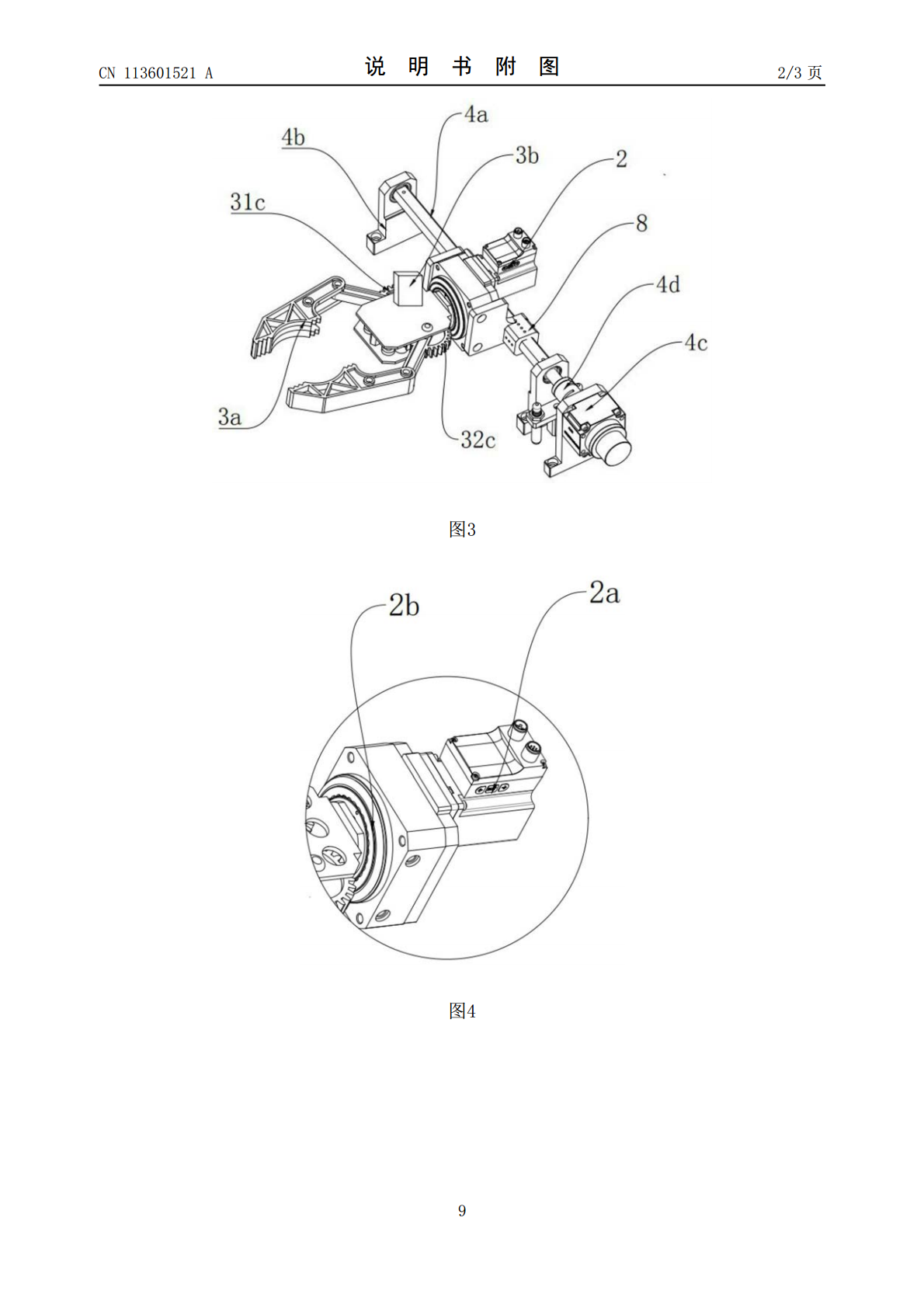
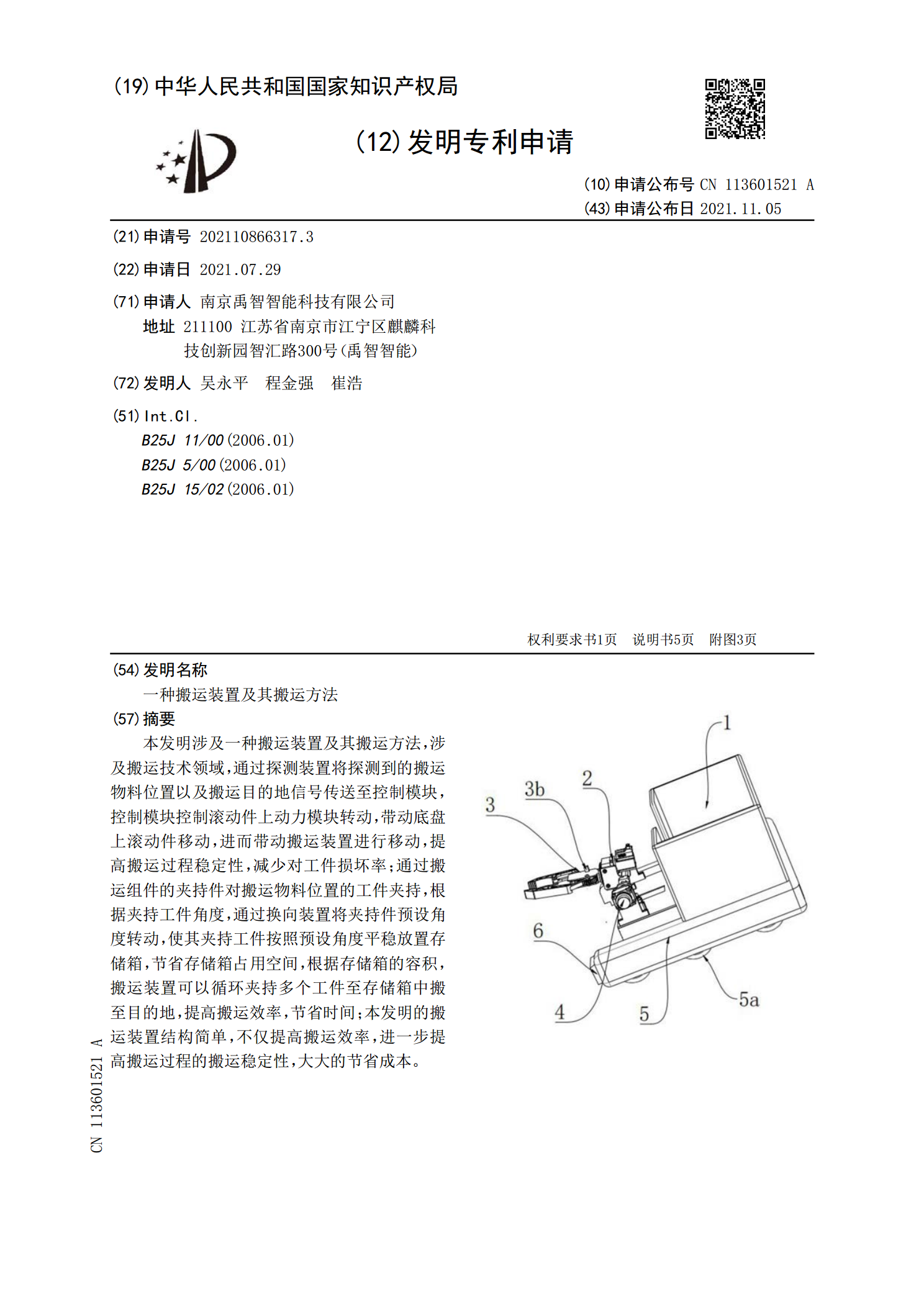
本发明涉及一种搬运装置及其搬运方法,涉及搬运技术领域,通过探测装置将探测到的搬运物料位置以及搬运目的地信号传送至控制模块,控制模块控制滚动件上动力模块转动,带动底盘上滚动件移动,进而带动搬运装置进行移动,提高搬运过程稳定性,减少对工件损坏率;通过搬运组件的夹持件对搬运物料位置的工件夹持,根据夹持工件角度,通过换向装置将夹持件预设角度转动,使其夹持工件按照预设角度平稳放置存储箱,节省存储箱占用空间,根据存储箱的容积,搬运装置可以循环夹持多个工件至存储箱中搬至目的地,提高搬运效率,节省时间;本发明的搬运装置结
一种汽车搬运装置及其搬运方法.pdf
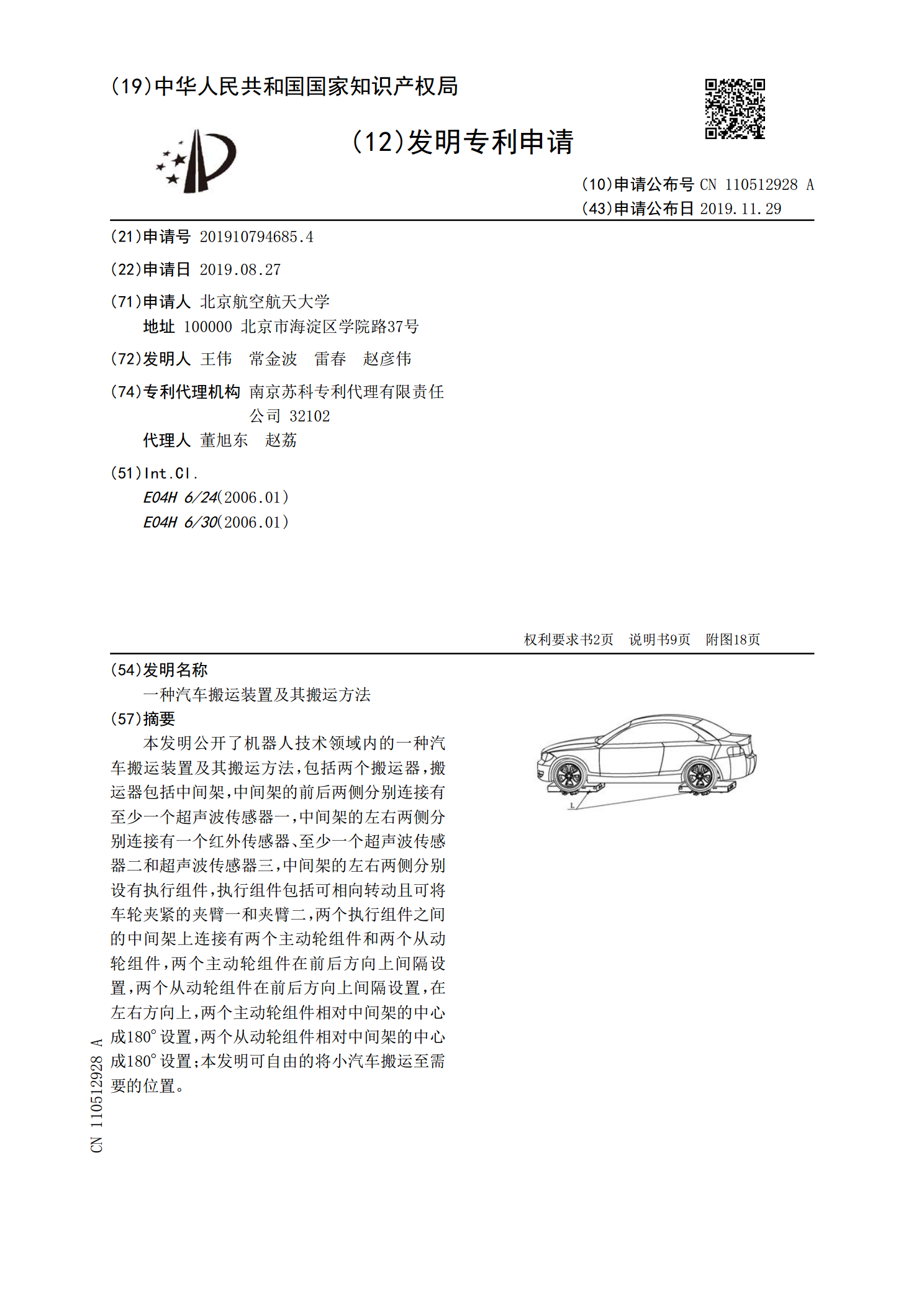
本发明公开了机器人技术领域内的一种汽车搬运装置及其搬运方法,包括两个搬运器,搬运器包括中间架,中间架的前后两侧分别连接有至少一个超声波传感器一,中间架的左右两侧分别连接有一个红外传感器、至少一个超声波传感器二和超声波传感器三,中间架的左右两侧分别设有执行组件,执行组件包括可相向转动且可将车轮夹紧的夹臂一和夹臂二,两个执行组件之间的中间架上连接有两个主动轮组件和两个从动轮组件,两个主动轮组件在前后方向上间隔设置,两个从动轮组件在前后方向上间隔设置,在左右方向上,两个主动轮组件相对中间架的中心成180°设置,
一种酒店床垫搬运装置及其搬运方法.pdf
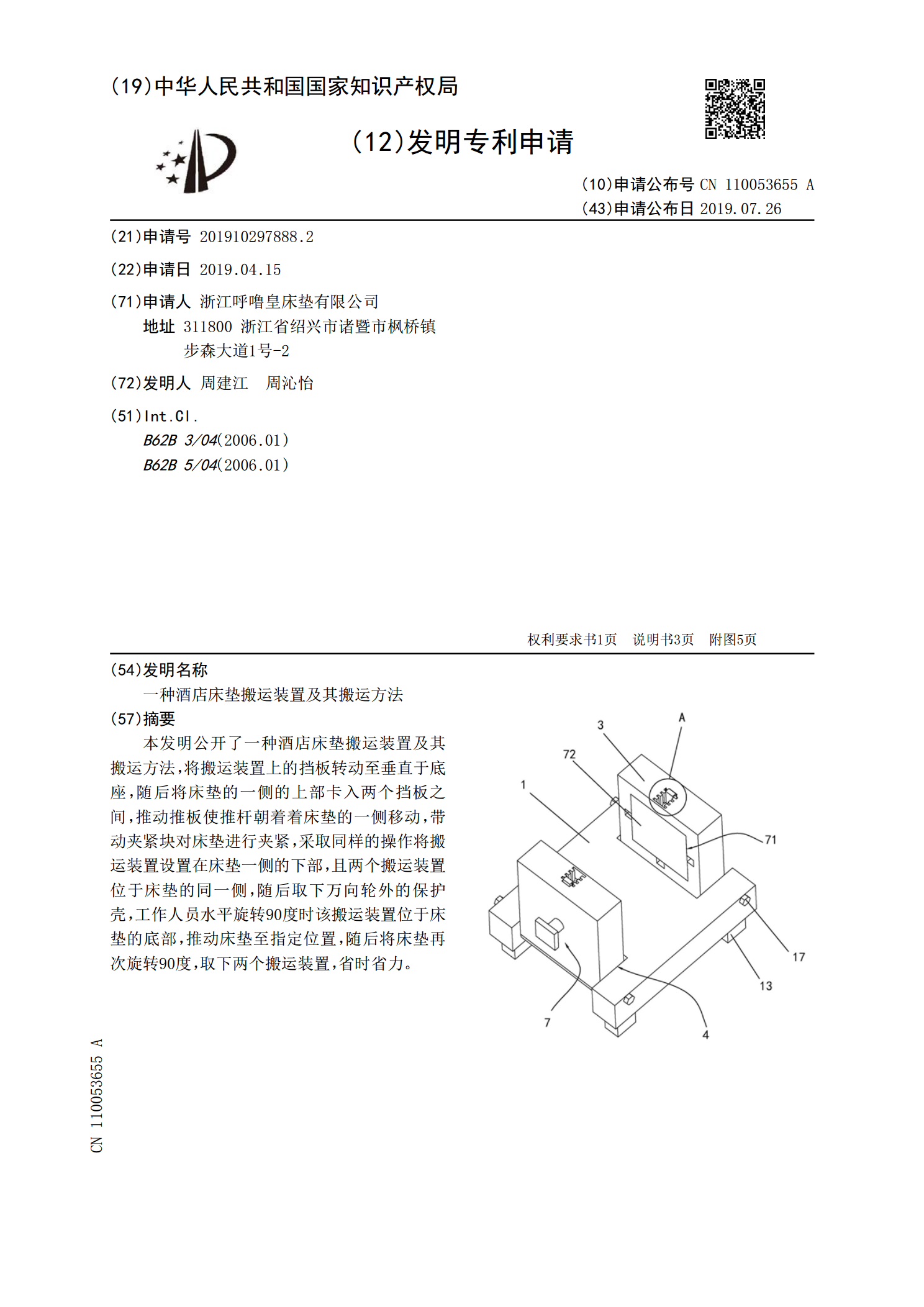
本发明公开了一种酒店床垫搬运装置及其搬运方法,将搬运装置上的挡板转动至垂直于底座,随后将床垫的一侧的上部卡入两个挡板之间,推动推板使推杆朝着着床垫的一侧移动,带动夹紧块对床垫进行夹紧,采取同样的操作将搬运装置设置在床垫一侧的下部,且两个搬运装置位于床垫的同一侧,随后取下万向轮外的保护壳,工作人员水平旋转90度时该搬运装置位于床垫的底部,推动床垫至指定位置,随后将床垫再次旋转90度,取下两个搬运装置,省时省力。
一种用于成品汽车搬运的装置及其搬运方法.pdf
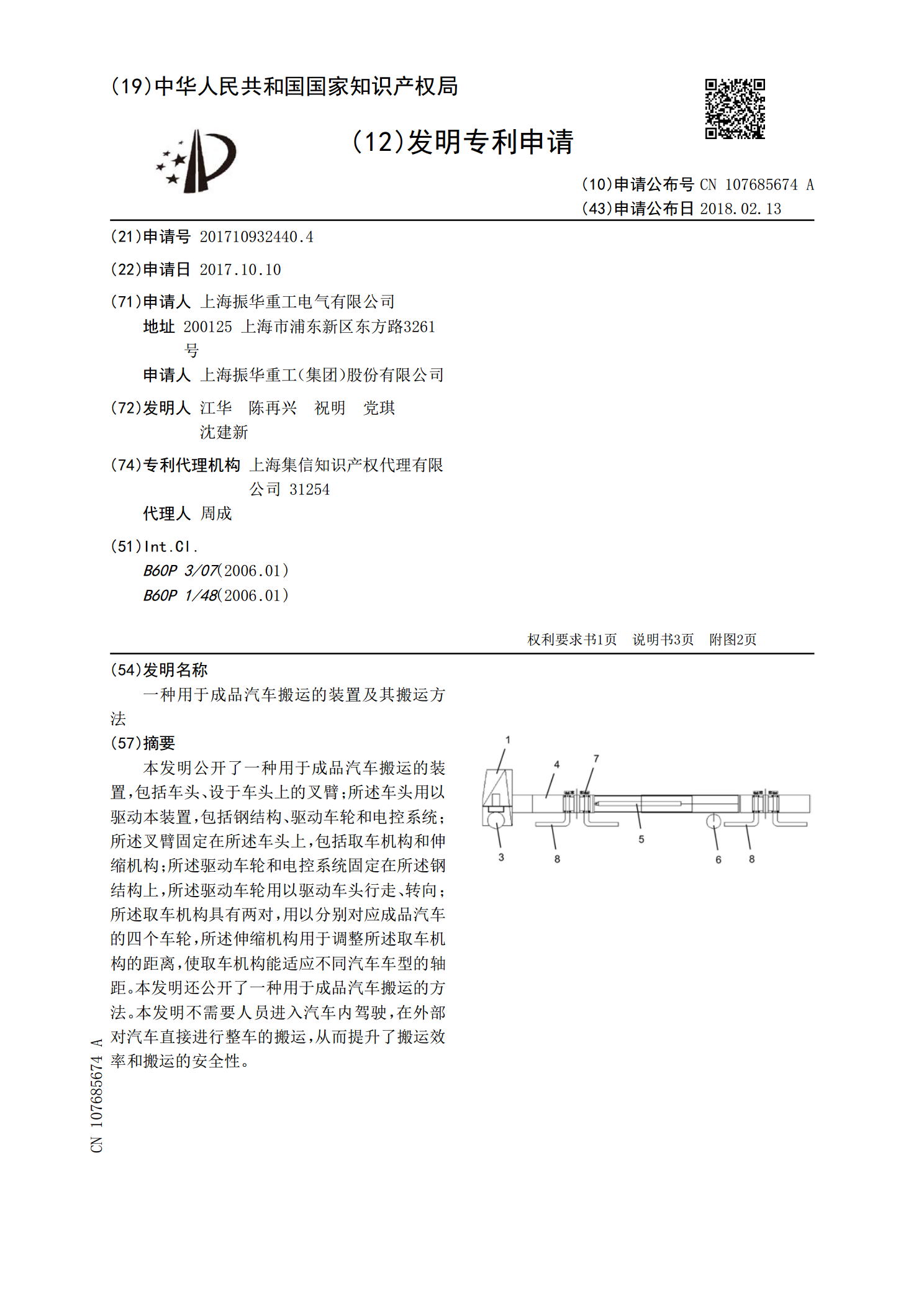
本发明公开了一种用于成品汽车搬运的装置,包括车头、设于车头上的叉臂;所述车头用以驱动本装置,包括钢结构、驱动车轮和电控系统;所述叉臂固定在所述车头上,包括取车机构和伸缩机构;所述驱动车轮和电控系统固定在所述钢结构上,所述驱动车轮用以驱动车头行走、转向;所述取车机构具有两对,用以分别对应成品汽车的四个车轮,所述伸缩机构用于调整所述取车机构的距离,使取车机构能适应不同汽车车型的轴距。本发明还公开了一种用于成品汽车搬运的方法。本发明不需要人员进入汽车内驾驶,在外部对汽车直接进行整车的搬运,从而提升了搬运效率和搬
一种货物物流仓储用搬运装置及其搬运方法.pdf
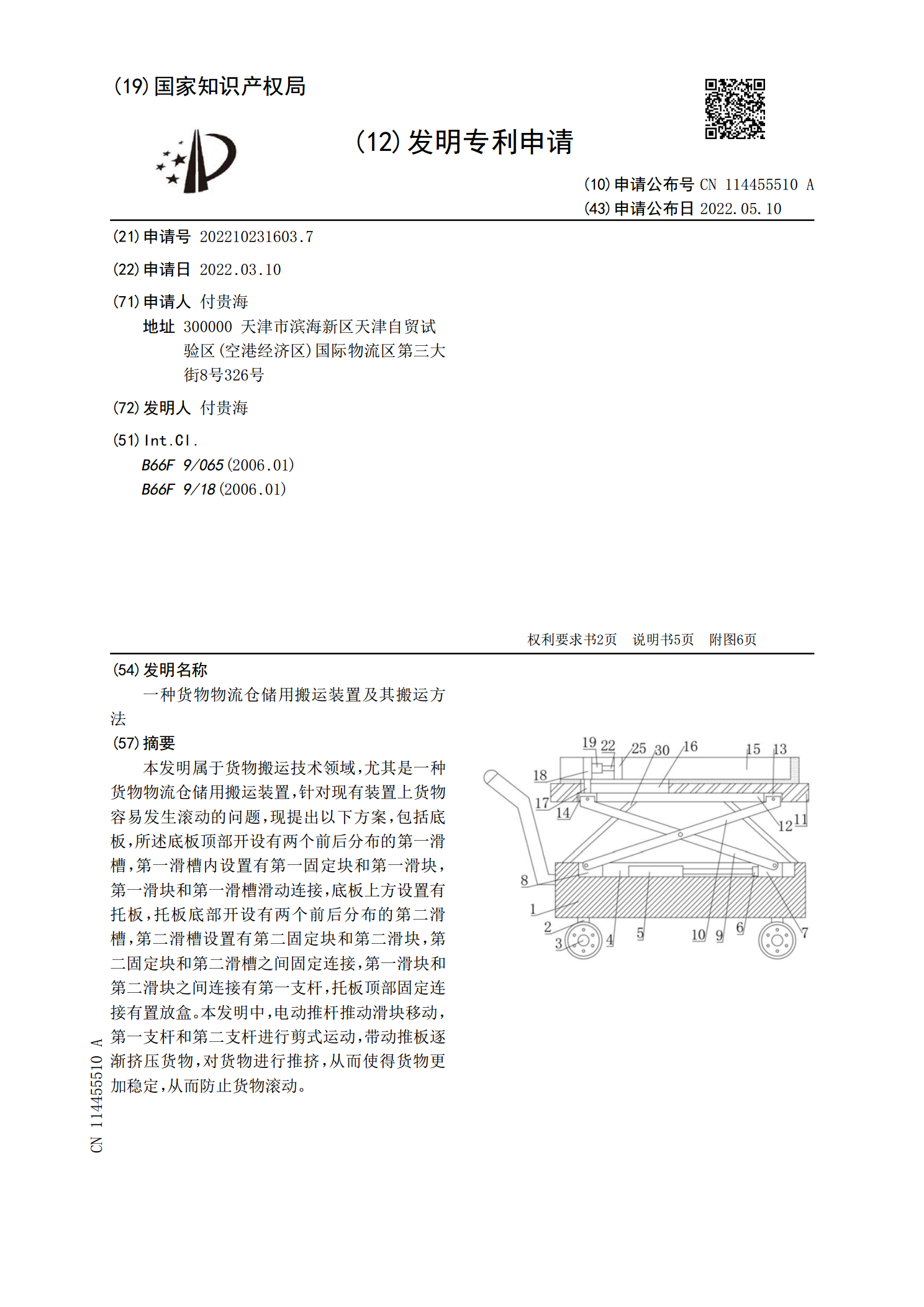
本发明属于货物搬运技术领域,尤其是一种货物物流仓储用搬运装置,针对现有装置上货物容易发生滚动的问题,现提出以下方案,包括底板,所述底板顶部开设有两个前后分布的第一滑槽,第一滑槽内设置有第一固定块和第一滑块,第一滑块和第一滑槽滑动连接,底板上方设置有托板,托板底部开设有两个前后分布的第二滑槽,第二滑槽设置有第二固定块和第二滑块,第二固定块和第二滑槽之间固定连接,第一滑块和第二滑块之间连接有第一支杆,托板顶部固定连接有置放盒。本发明中,电动推杆推动滑块移动,第一支杆和第二支杆进行剪式运动,带动推板逐渐挤压货物