
基于球形万向节控制的微创手术器械柔性关节的驱动装置.pdf

映雁****魔王


1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于球形万向节控制的微创手术器械柔性关节的驱动装置.pdf
本发明公开了一种基于球形万向节控制的微创手术器械柔性关节的驱动装置,包括操作手柄壳体、柔性关节、柔锁、缓冲组件、后端控制机构和设于壳体内的支撑架,柔性关节的一端固定于外管内;后端控制机构为后端一级组件和与后端一级组件同心设置的后端二级组件,后端一级组件与后端二级组件通过旋转内球面和旋转外球面的配合进行相对周向运动;柔锁的一端与柔性关节适配连接,另一端与缓冲组件和后端控制机构联动配合,本发明方便工人安装,减少成本,同时通过本发明柔锁驱动的方式,能够满足柔性关节不同的应用情况。
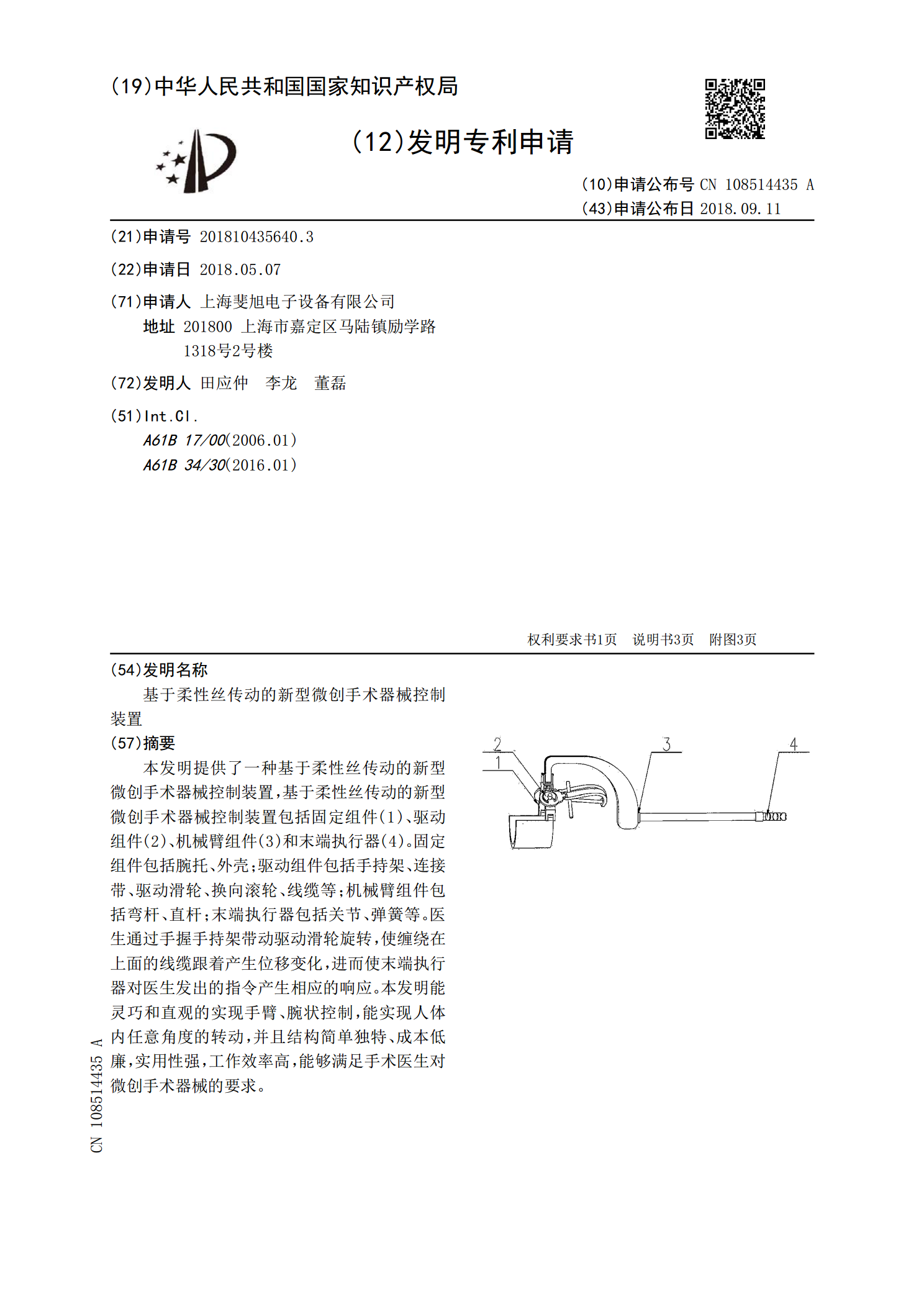
基于柔性丝传动的新型微创手术器械控制装置.pdf
本发明提供了一种基于柔性丝传动的新型微创手术器械控制装置,基于柔性丝传动的新型微创手术器械控制装置包括固定组件(1)、驱动组件(2)、机械臂组件(3)和末端执行器(4)。固定组件包括腕托、外壳;驱动组件包括手持架、连接带、驱动滑轮、换向滚轮、线缆等;机械臂组件包括弯杆、直杆;末端执行器包括关节、弹簧等。医生通过手握手持架带动驱动滑轮旋转,使缠绕在上面的线缆跟着产生位移变化,进而使末端执行器对医生发出的指令产生相应的响应。本发明能灵巧和直观的实现手臂、腕状控制,能实现人体内任意角度的转动,并且结构简单独特、

基于柔绳传动的外骨骼柔性关节驱动装置.pdf
本发明公开了一种基于柔绳传动的外骨骼柔性关节驱动装置,它包括机架、电机、关节、绕线装置和柔绳,关节的箱体和绕线装置分别与机架固定连接,电机通过联轴器与绕线装置连接;柔绳缠绕在绕线装置上,并且在由绕线装置引出后,柔绳的两端分别与关节的固定轮固定连接。本发明在精确实现传动的同时,较大程度地减轻了外骨骼康复治疗装置的重量,减轻患者的负担。

一种软体驱动的微创手术器械开合装置.pdf
本发明公开一种软体驱动的微创手术器械开合装置,包括:末端钳体、软体驱动组件、连接机构、传动结构、电气组件和流体控制模块;末端钳体通过连接件与软体驱动器的输出端连接;软体驱动组件,包括软体驱动器;所述的传动结构,为封装气/液体管路的长距离装置,内部为中空,前后留有管路和电气的通孔;所述的电气组件,为两条连接导线,所述的流体控制模块,连接软管,为气/液源,同时实施流体控制;所述流体控制模块,包括1‑4个结构相同的控制组件。本发明可以实现夹持、游离人体组织时的弹性操作,刚度可调整,提高了器械与生物组织交互的安全
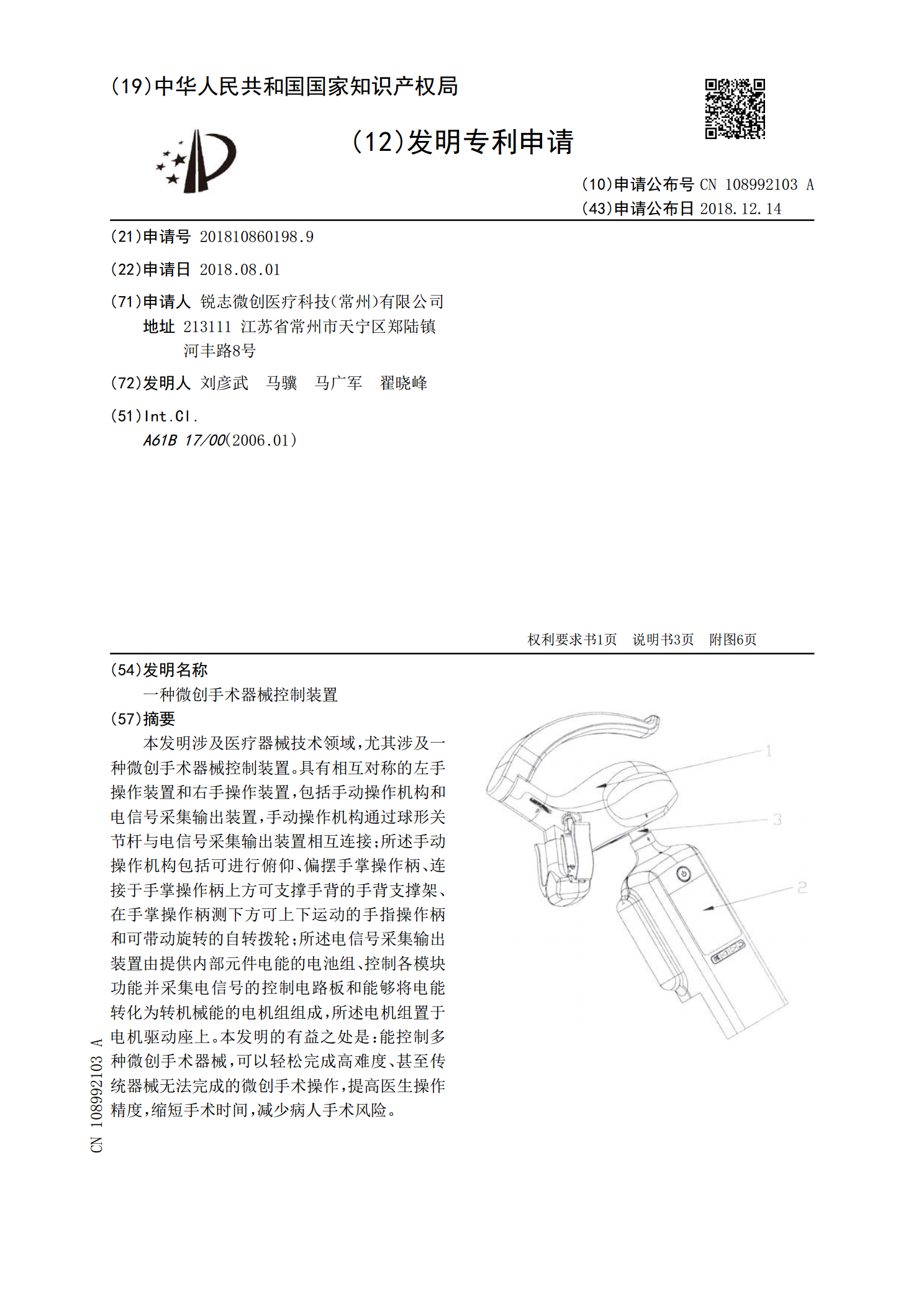
一种微创手术器械控制装置.pdf
本发明涉及医疗器械技术领域,尤其涉及一种微创手术器械控制装置。具有相互对称的左手操作装置和右手操作装置,包括手动操作机构和电信号采集输出装置,手动操作机构通过球形关节杆与电信号采集输出装置相互连接;所述手动操作机构包括可进行俯仰、偏摆手掌操作柄、连接于手掌操作柄上方可支撑手背的手背支撑架、在手掌操作柄测下方可上下运动的手指操作柄和可带动旋转的自转拨轮;所述电信号采集输出装置由提供内部元件电能的电池组、控制各模块功能并采集电信号的控制电路板和能够将电能转化为转机械能的电机组组成,所述电机组置于电机驱动座上。