
基于柔性丝传动的新型微创手术器械控制装置.pdf

一只****ng

1/8

2/8
3/8

4/8

5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于柔性丝传动的新型微创手术器械控制装置.pdf
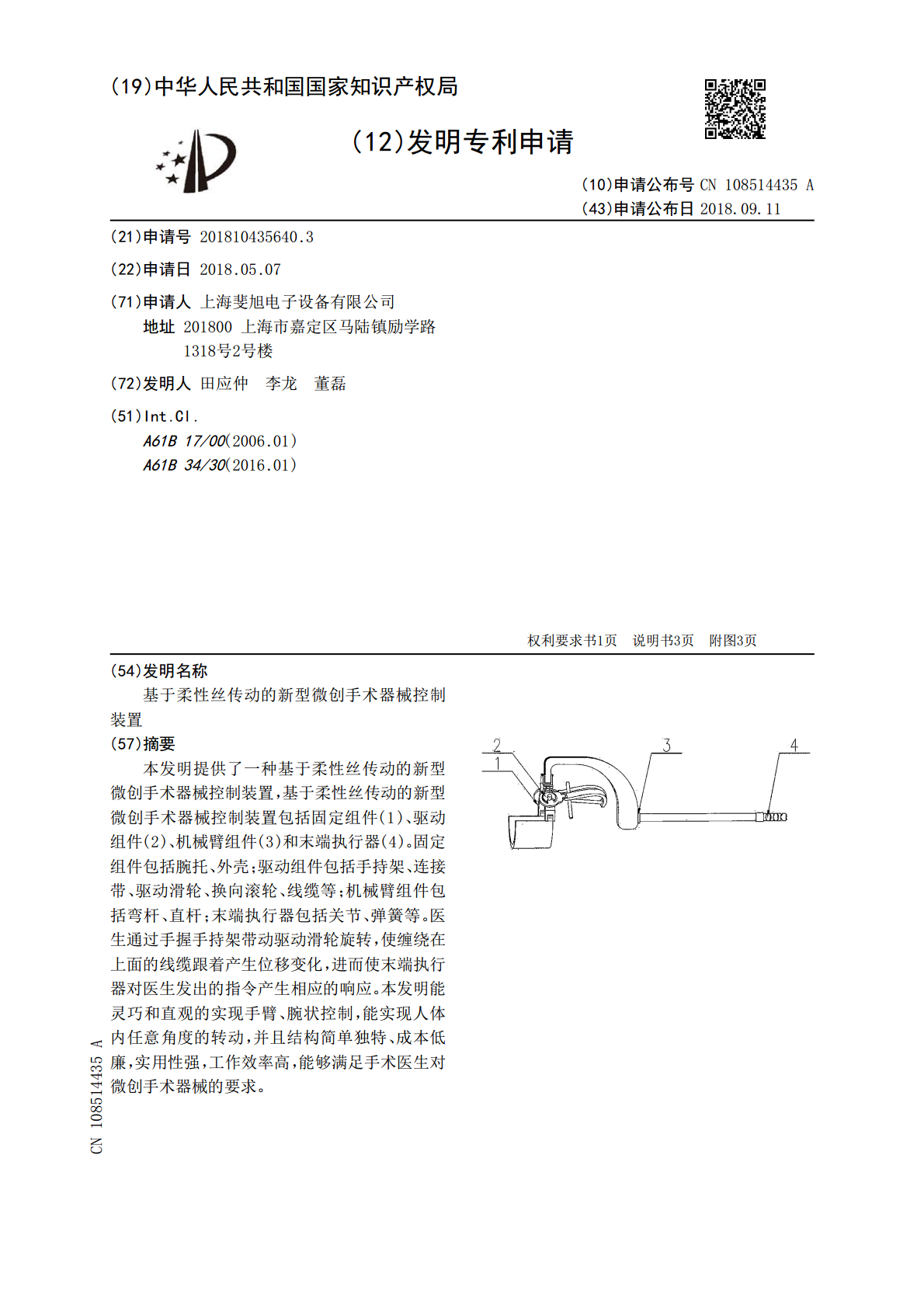
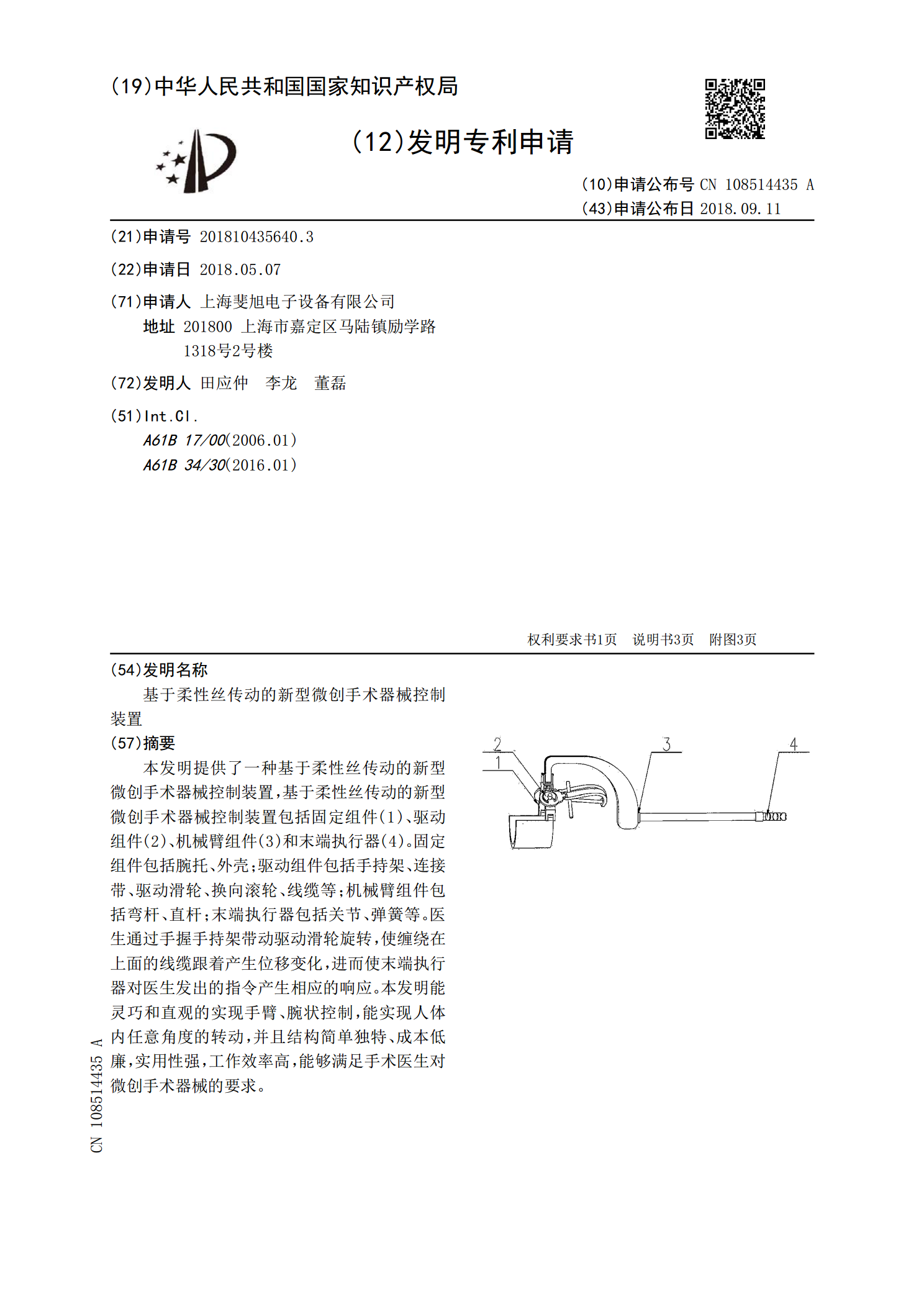
本发明提供了一种基于柔性丝传动的新型微创手术器械控制装置,基于柔性丝传动的新型微创手术器械控制装置包括固定组件(1)、驱动组件(2)、机械臂组件(3)和末端执行器(4)。固定组件包括腕托、外壳;驱动组件包括手持架、连接带、驱动滑轮、换向滚轮、线缆等;机械臂组件包括弯杆、直杆;末端执行器包括关节、弹簧等。医生通过手握手持架带动驱动滑轮旋转,使缠绕在上面的线缆跟着产生位移变化,进而使末端执行器对医生发出的指令产生相应的响应。本发明能灵巧和直观的实现手臂、腕状控制,能实现人体内任意角度的转动,并且结构简单独特、

基于球形万向节控制的微创手术器械柔性关节的驱动装置.pdf
本发明公开了一种基于球形万向节控制的微创手术器械柔性关节的驱动装置,包括操作手柄壳体、柔性关节、柔锁、缓冲组件、后端控制机构和设于壳体内的支撑架,柔性关节的一端固定于外管内;后端控制机构为后端一级组件和与后端一级组件同心设置的后端二级组件,后端一级组件与后端二级组件通过旋转内球面和旋转外球面的配合进行相对周向运动;柔锁的一端与柔性关节适配连接,另一端与缓冲组件和后端控制机构联动配合,本发明方便工人安装,减少成本,同时通过本发明柔锁驱动的方式,能够满足柔性关节不同的应用情况。
基于异形齿轮传动的双向弯曲微创手术器械.pdf
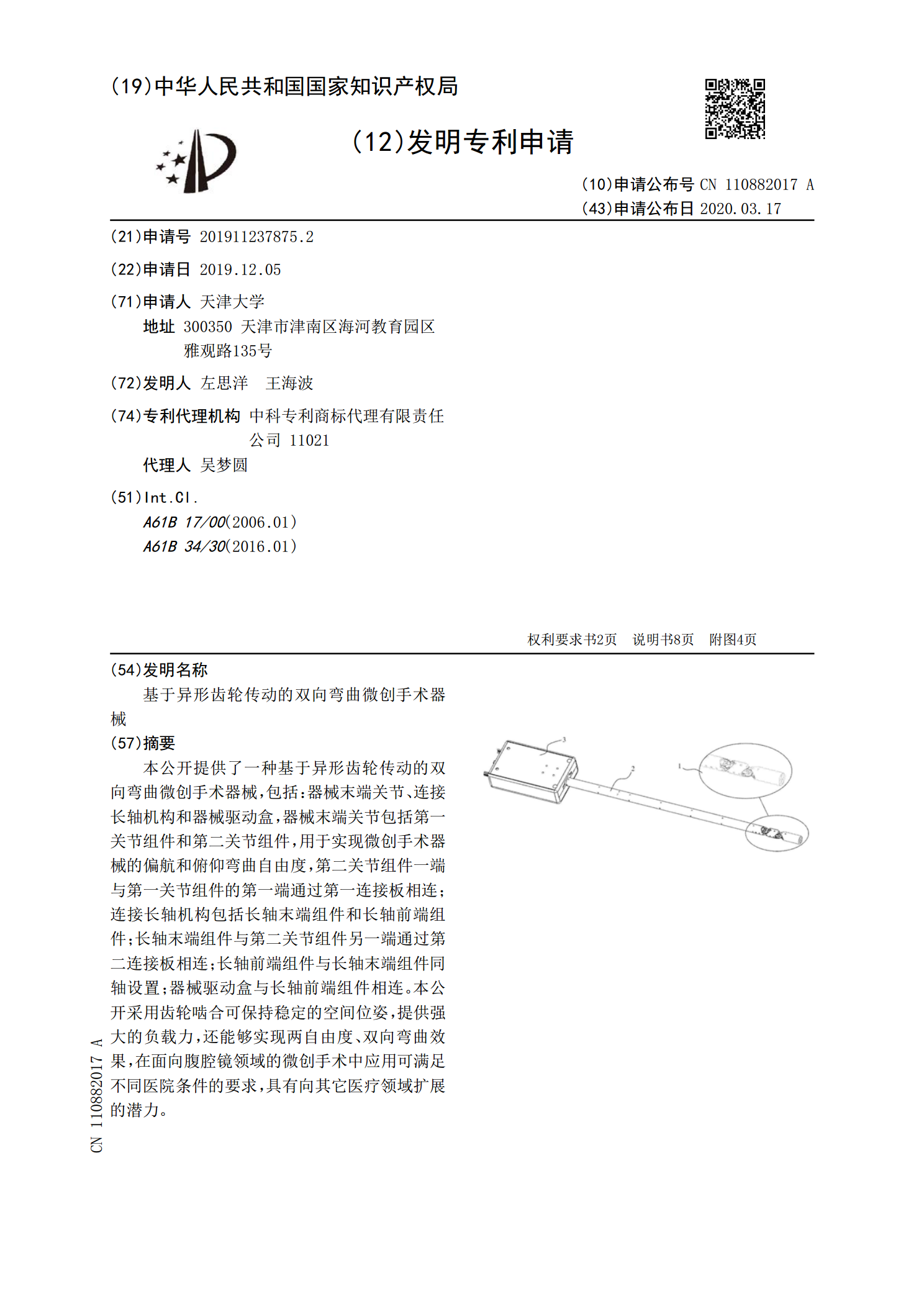
本公开提供了一种基于异形齿轮传动的双向弯曲微创手术器械,包括:器械末端关节、连接长轴机构和器械驱动盒,器械末端关节包括第一关节组件和第二关节组件,用于实现微创手术器械的偏航和俯仰弯曲自由度,第二关节组件一端与第一关节组件的第一端通过第一连接板相连;连接长轴机构包括长轴末端组件和长轴前端组件;长轴末端组件与第二关节组件另一端通过第二连接板相连;长轴前端组件与长轴末端组件同轴设置;器械驱动盒与长轴前端组件相连。本公开采用齿轮啮合可保持稳定的空间位姿,提供强大的负载力,还能够实现两自由度、双向弯曲效果,在面向腹

一种丝传动柔性手术器械的运动精度检测方法.docx
一种丝传动柔性手术器械的运动精度检测方法论文题目:一种丝传动柔性手术器械的运动精度检测方法摘要:近年来,微创手术在医疗领域得到广泛应用,丝传动柔性手术器械作为一种具有高度柔性和精准操作能力的手术工具,成为微创手术中重要的辅助工具。在丝传动柔性手术器械的设计和使用过程中,运动精度的检测成为关键问题。本文提出了一种基于传感器技术的丝传动柔性手术器械运动精度检测方法,通过对传感器信号的采集和处理,实现对丝传动柔性手术器械运动过程中的误差监测和校准,提高手术的准确性和安全性。关键词:丝传动柔性手术器械;运动精度检
一种微创手术器械控制装置.pdf
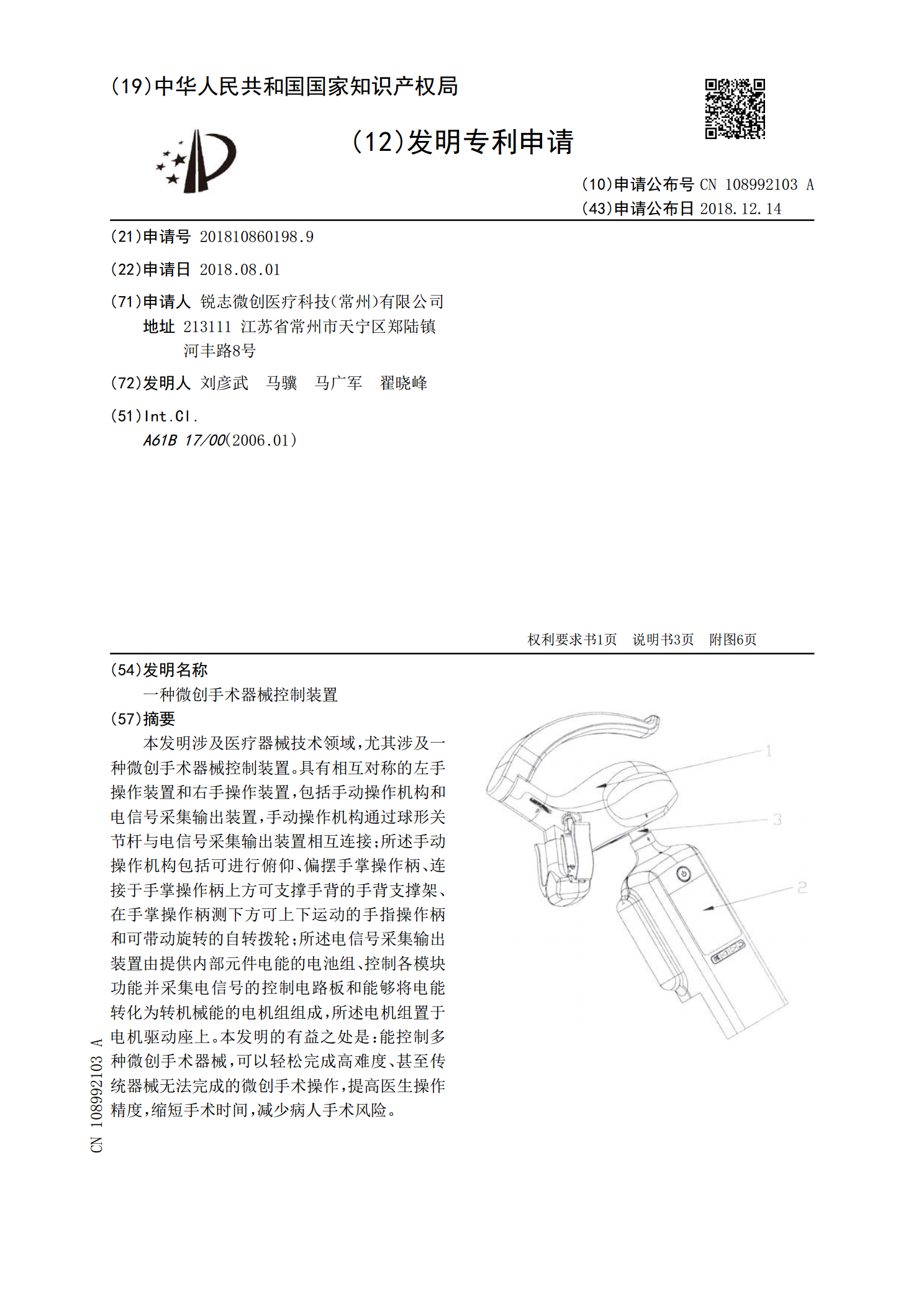
本发明涉及医疗器械技术领域,尤其涉及一种微创手术器械控制装置。具有相互对称的左手操作装置和右手操作装置,包括手动操作机构和电信号采集输出装置,手动操作机构通过球形关节杆与电信号采集输出装置相互连接;所述手动操作机构包括可进行俯仰、偏摆手掌操作柄、连接于手掌操作柄上方可支撑手背的手背支撑架、在手掌操作柄测下方可上下运动的手指操作柄和可带动旋转的自转拨轮;所述电信号采集输出装置由提供内部元件电能的电池组、控制各模块功能并采集电信号的控制电路板和能够将电能转化为转机械能的电机组组成,所述电机组置于电机驱动座上。