
一种码垛机器人抓手装置.pdf

Ch****49

1/8

2/8
3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种码垛机器人抓手装置.pdf
本发明公开了一种码垛机器人抓手装置,包括两组相对的安装底座和位于安装底座上的竖直支撑杆,所述安装底座内设有减震装置,所述相对一组竖直支撑杆上端固定安装有滑轨支撑杆一,所述滑轨支撑杆一内侧设有滑动装置一,所述滑动装置一上固定安装有滑轨支撑杆二,所述滑轨支撑杆二上设有滑动装置二,所述滑动装置二一侧设有抓手装置,所述机器人抓手通过滑动装置一和滑动装置二便于调节在X轴和Y轴方向上的位置,通过抓手装置可以调节抓手宽度,所述安装底座底部一侧设有用电接口,所述竖直支撑杆一侧设有控制器。本发明的有益效果是,结构简单,实用
一种码垛机器人抓手固定角度转位装置.pdf
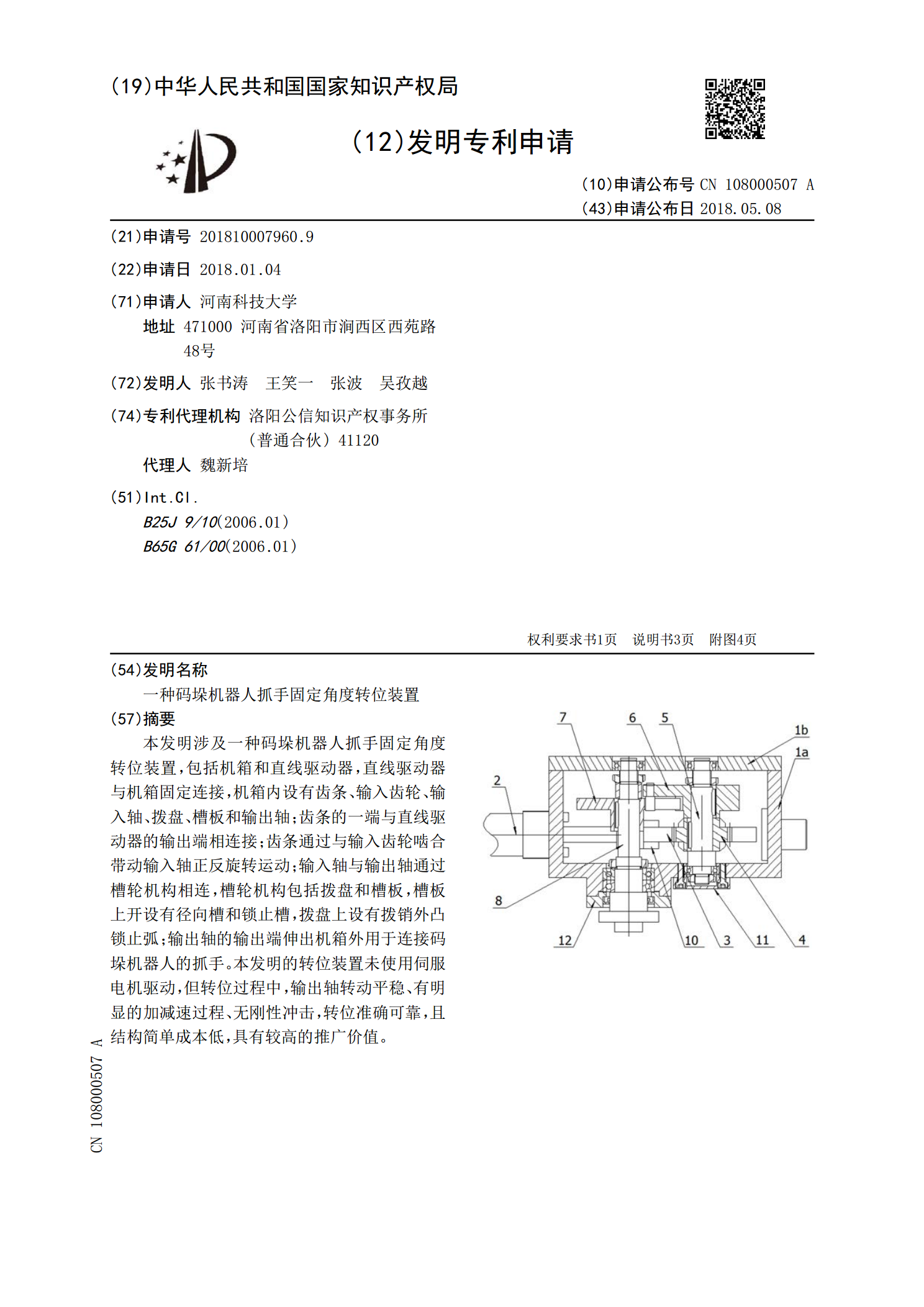
本发明涉及一种码垛机器人抓手固定角度转位装置,包括机箱和直线驱动器,直线驱动器与机箱固定连接,机箱内设有齿条、输入齿轮、输入轴、拨盘、槽板和输出轴;齿条的一端与直线驱动器的输出端相连接;齿条通过与输入齿轮啮合带动输入轴正反旋转运动;输入轴与输出轴通过槽轮机构相连,槽轮机构包括拨盘和槽板,槽板上开设有径向槽和锁止槽,拨盘上设有拨销外凸锁止弧;输出轴的输出端伸出机箱外用于连接码垛机器人的抓手。本发明的转位装置未使用伺服电机驱动,但转位过程中,输出轴转动平稳、有明显的加减速过程、无刚性冲击,转位准确可靠,且结构

一种用于码垛机器人的可调式抓手.pdf
本发明公开了一种用于码垛机器人的可调式抓手,包括机器人抓臂、安装固定板、机器人连接臂、背部垫板、支撑平台、安装轴固定板、抓臂安装轴,所述侧面加强筋板上方安装有所述支撑平台,所述支撑平台上方安装有所述安装轴固定板,所述安装轴固定板上方安装有所述抓臂安装轴,所述抓臂安装轴下方安装有抓臂移动滑轨,所述抓臂移动滑轨下方安装有下压活塞缸,所述下压活塞缸下方安装有活塞缸压板,所述活塞缸压板下方安装有抓臂旋转轴,所述侧面加强筋板上方安装有筋板安装孔。有益效果在于:整个机构简单,稳定性高,施力精准,不易损坏物品,降低了机
一种带有精准定位机构的码垛机器人抓手.pdf
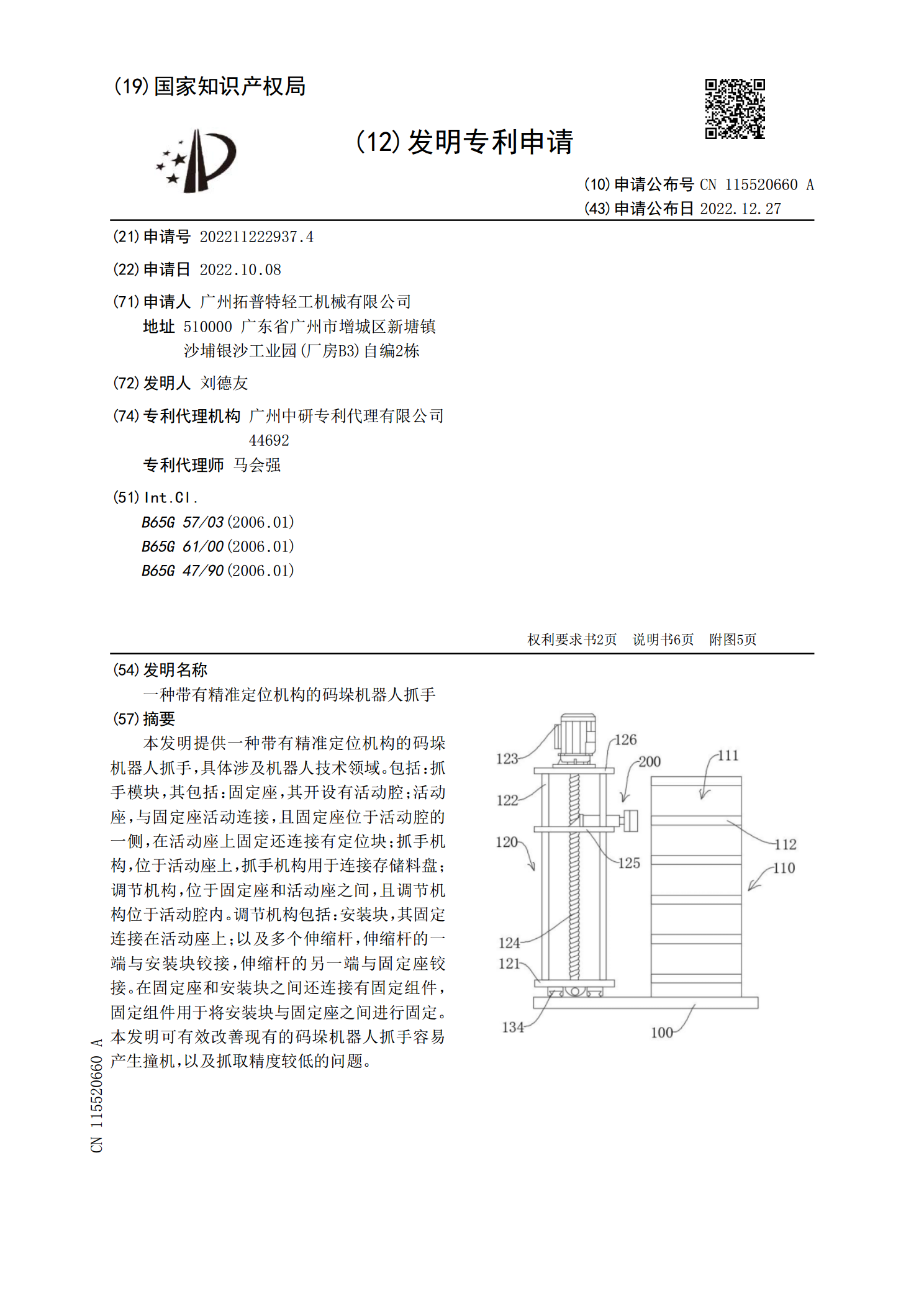
本发明提供一种带有精准定位机构的码垛机器人抓手,具体涉及机器人技术领域。包括:抓手模块,其包括:固定座,其开设有活动腔;活动座,与固定座活动连接,且固定座位于活动腔的一侧,在活动座上固定还连接有定位块;抓手机构,位于活动座上,抓手机构用于连接存储料盘;调节机构,位于固定座和活动座之间,且调节机构位于活动腔内。调节机构包括:安装块,其固定连接在活动座上;以及多个伸缩杆,伸缩杆的一端与安装块铰接,伸缩杆的另一端与固定座铰接。在固定座和安装块之间还连接有固定组件,固定组件用于将安装块与固定座之间进行固定。本发明
一种工业机器人码垛装置.pdf
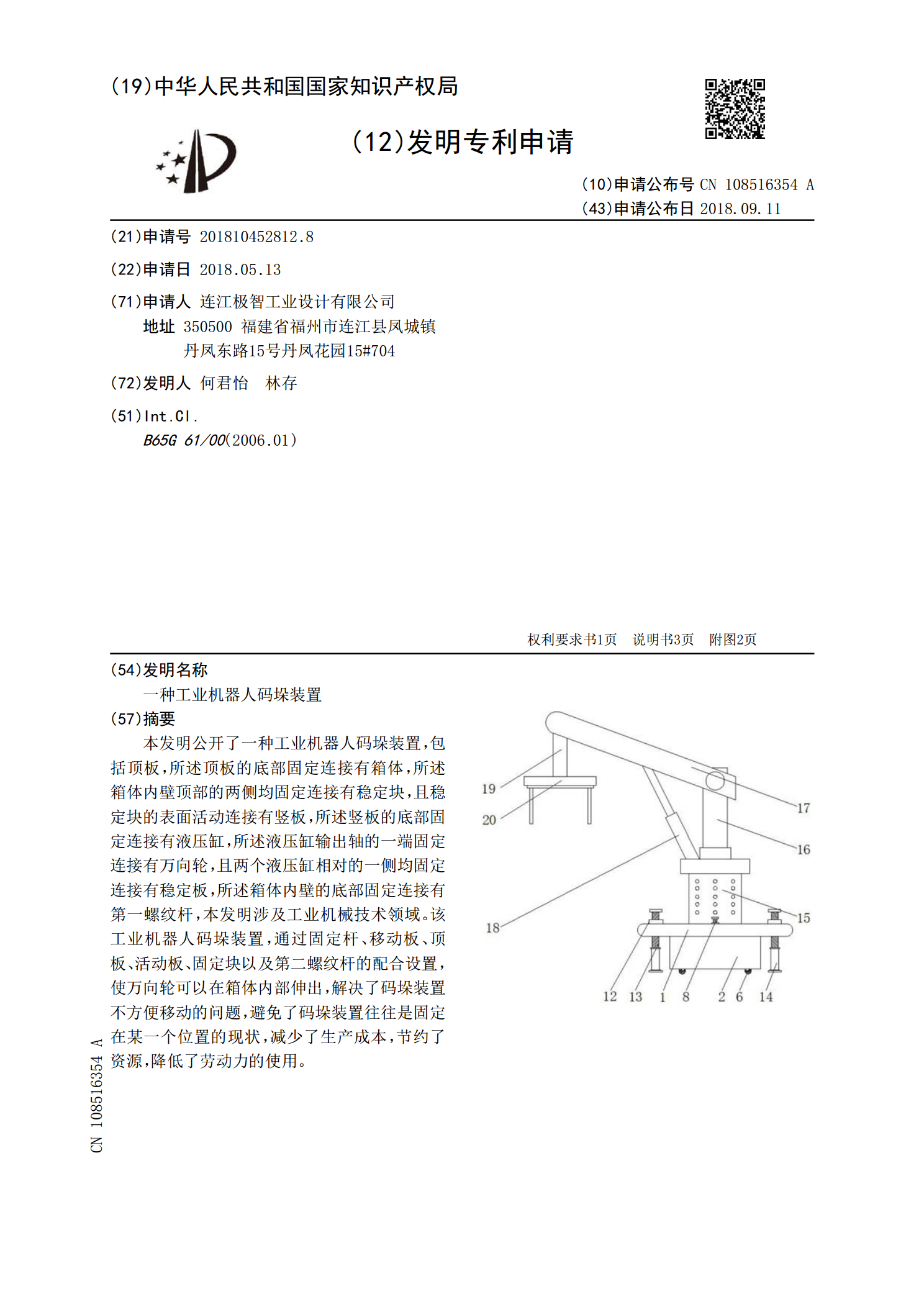
本发明公开了一种工业机器人码垛装置,包括顶板,所述顶板的底部固定连接有箱体,所述箱体内壁顶部的两侧均固定连接有稳定块,且稳定块的表面活动连接有竖板,所述竖板的底部固定连接有液压缸,所述液压缸输出轴的一端固定连接有万向轮,且两个液压缸相对的一侧均固定连接有稳定板,所述箱体内壁的底部固定连接有第一螺纹杆,本发明涉及工业机械技术领域。该工业机器人码垛装置,通过固定杆、移动板、顶板、活动板、固定块以及第二螺纹杆的配合设置,使万向轮可以在箱体内部伸出,解决了码垛装置不方便移动的问题,避免了码垛装置往往是固定在某一个