
一种带有精准定位机构的码垛机器人抓手.pdf

玉军****la


1/10

2/10
3/10
4/10
5/10
6/10
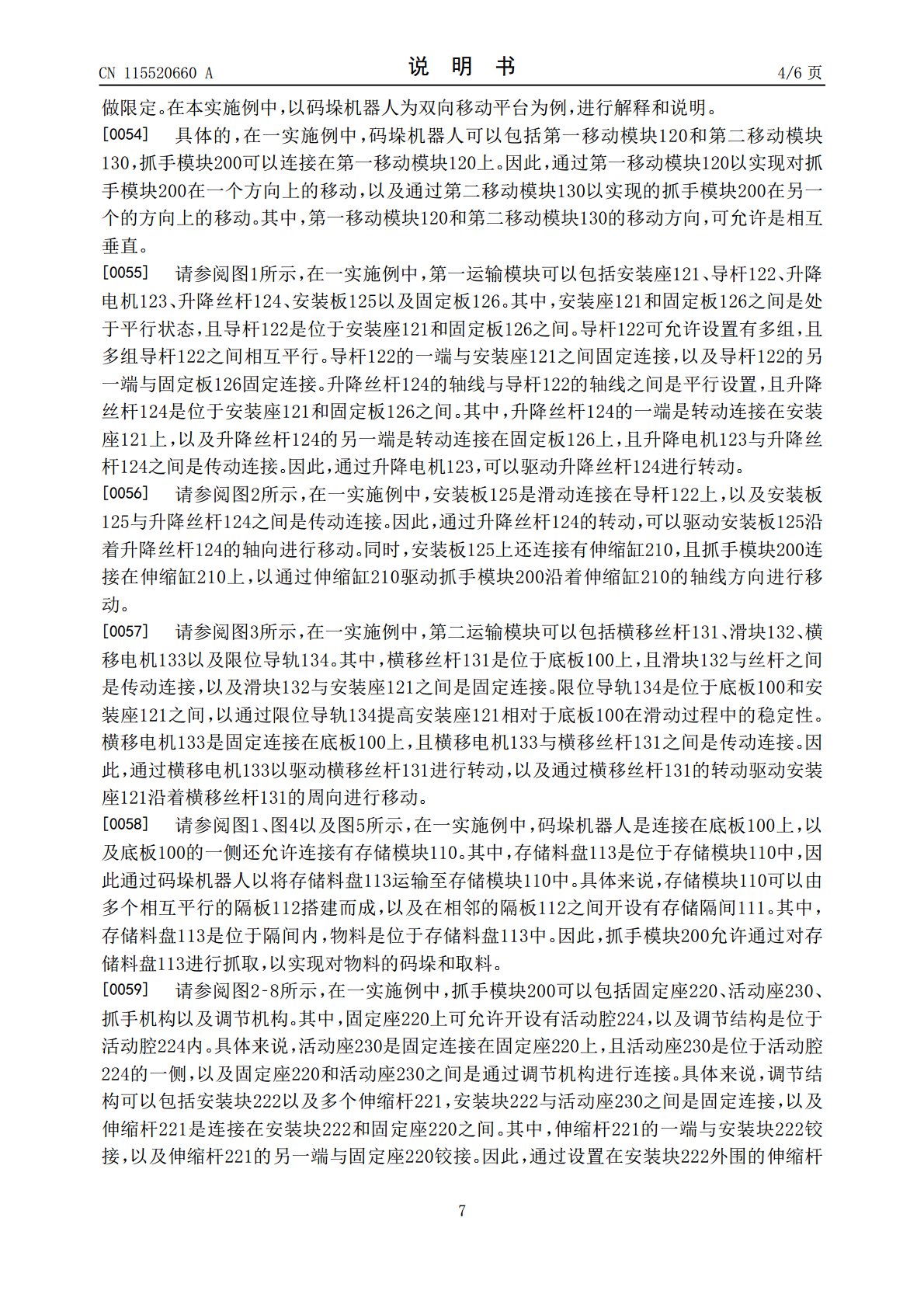
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种带有精准定位机构的码垛机器人抓手.pdf
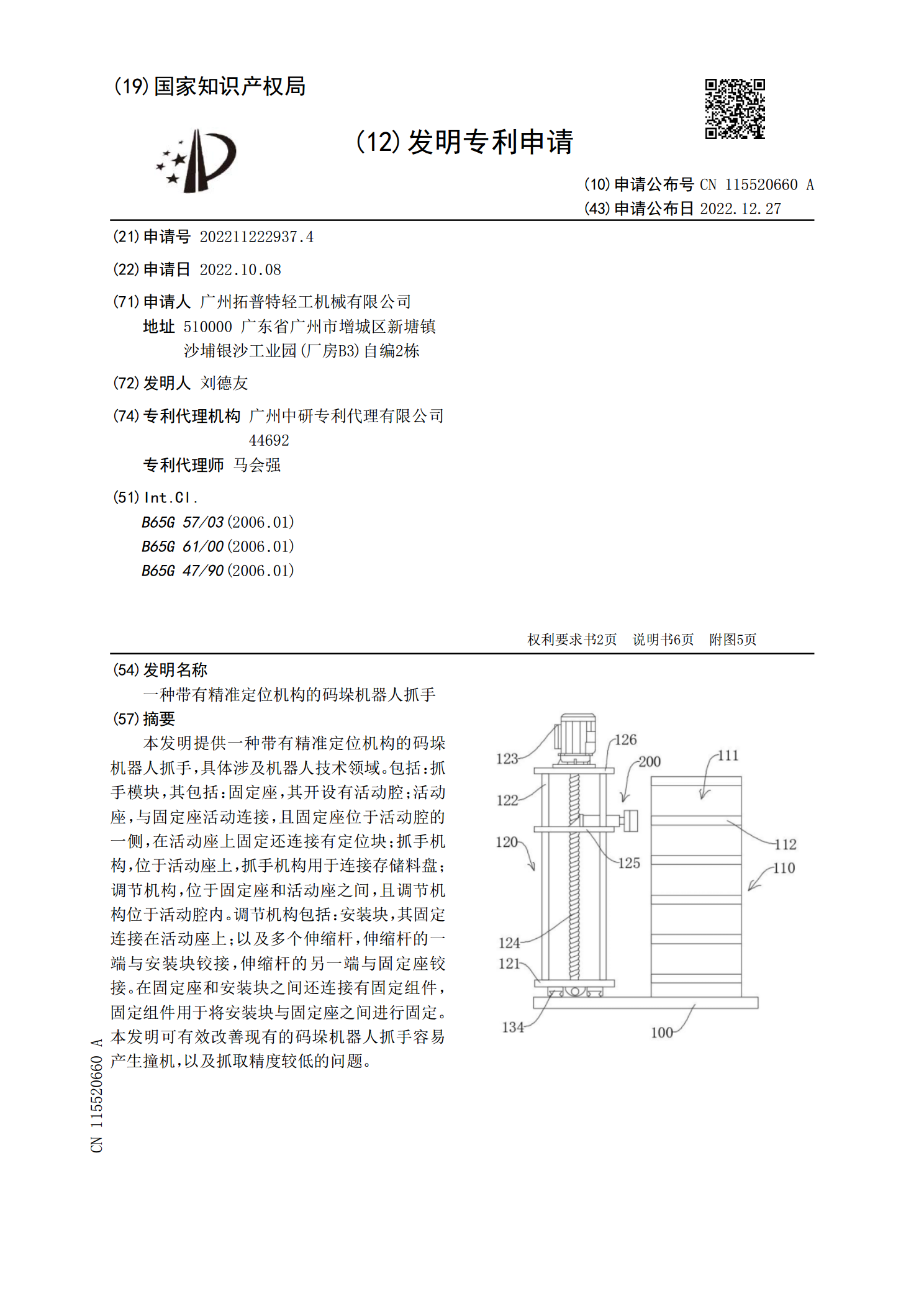
本发明提供一种带有精准定位机构的码垛机器人抓手,具体涉及机器人技术领域。包括:抓手模块,其包括:固定座,其开设有活动腔;活动座,与固定座活动连接,且固定座位于活动腔的一侧,在活动座上固定还连接有定位块;抓手机构,位于活动座上,抓手机构用于连接存储料盘;调节机构,位于固定座和活动座之间,且调节机构位于活动腔内。调节机构包括:安装块,其固定连接在活动座上;以及多个伸缩杆,伸缩杆的一端与安装块铰接,伸缩杆的另一端与固定座铰接。在固定座和安装块之间还连接有固定组件,固定组件用于将安装块与固定座之间进行固定。本发明

一种带有自动定位机构的成品纸箱码垛设备.pdf
本发明公开了一种带有自动定位机构的成品纸箱码垛设备,涉及成品纸箱码垛技术领域,包括工作台和放料板,工作台的顶部安装有轨道,且位于轨道顶部均匀安装有滑轮,轨道顶部且位于滑轮上均匀安装有传动定位机构;本发明通过放置板底部传动盘的正反转动,使得齿板移动的同时带动固定杆上的第二齿轮转动,并通过第二齿轮转动带动放置板底部两侧弧形杆对从第一传送带上送入的成品纸箱在夹板之间位置进行调节,使得整个夹板上固定位置能够夹取成品纸箱,避免了由于多组轨道上放置板底部的夹板夹取成品纸箱位置不同,造成后期放料板上成品纸箱摆放混乱出现
一种码垛机器人抓手装置.pdf
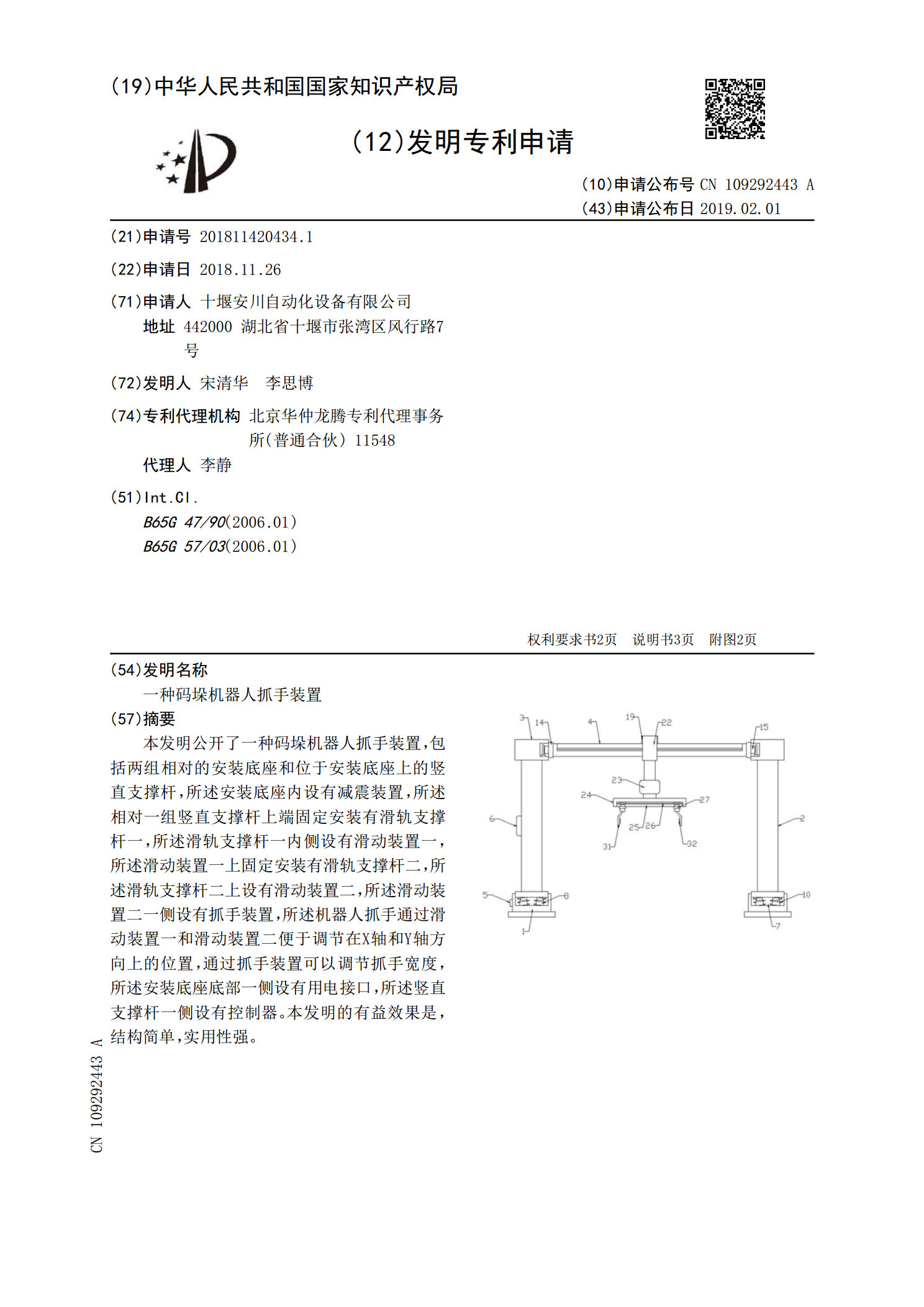
本发明公开了一种码垛机器人抓手装置,包括两组相对的安装底座和位于安装底座上的竖直支撑杆,所述安装底座内设有减震装置,所述相对一组竖直支撑杆上端固定安装有滑轨支撑杆一,所述滑轨支撑杆一内侧设有滑动装置一,所述滑动装置一上固定安装有滑轨支撑杆二,所述滑轨支撑杆二上设有滑动装置二,所述滑动装置二一侧设有抓手装置,所述机器人抓手通过滑动装置一和滑动装置二便于调节在X轴和Y轴方向上的位置,通过抓手装置可以调节抓手宽度,所述安装底座底部一侧设有用电接口,所述竖直支撑杆一侧设有控制器。本发明的有益效果是,结构简单,实用
一种带有吸网手的机器人抓手机构.pdf
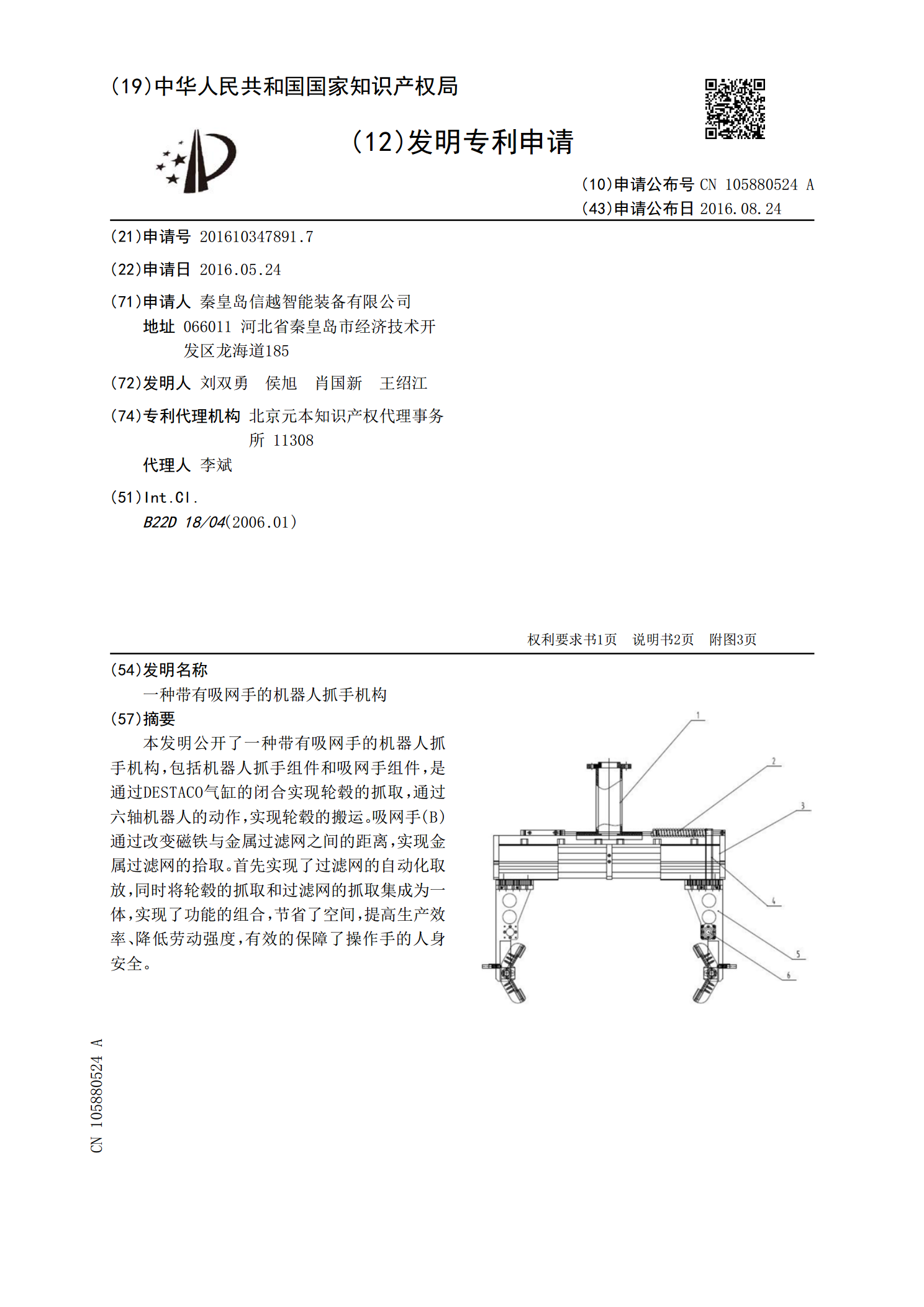
本发明公开了一种带有吸网手的机器人抓手机构,包括机器人抓手组件和吸网手组件,是通过DESTACO气缸的闭合实现轮毂的抓取,通过六轴机器人的动作,实现轮毂的搬运。吸网手(B)通过改变磁铁与金属过滤网之间的距离,实现金属过滤网的拾取。首先实现了过滤网的自动化取放,同时将轮毂的抓取和过滤网的抓取集成为一体,实现了功能的组合,节省了空间,提高生产效率、降低劳动强度,有效的保障了操作手的人身安全。
一种码垛设备定位机构.pdf
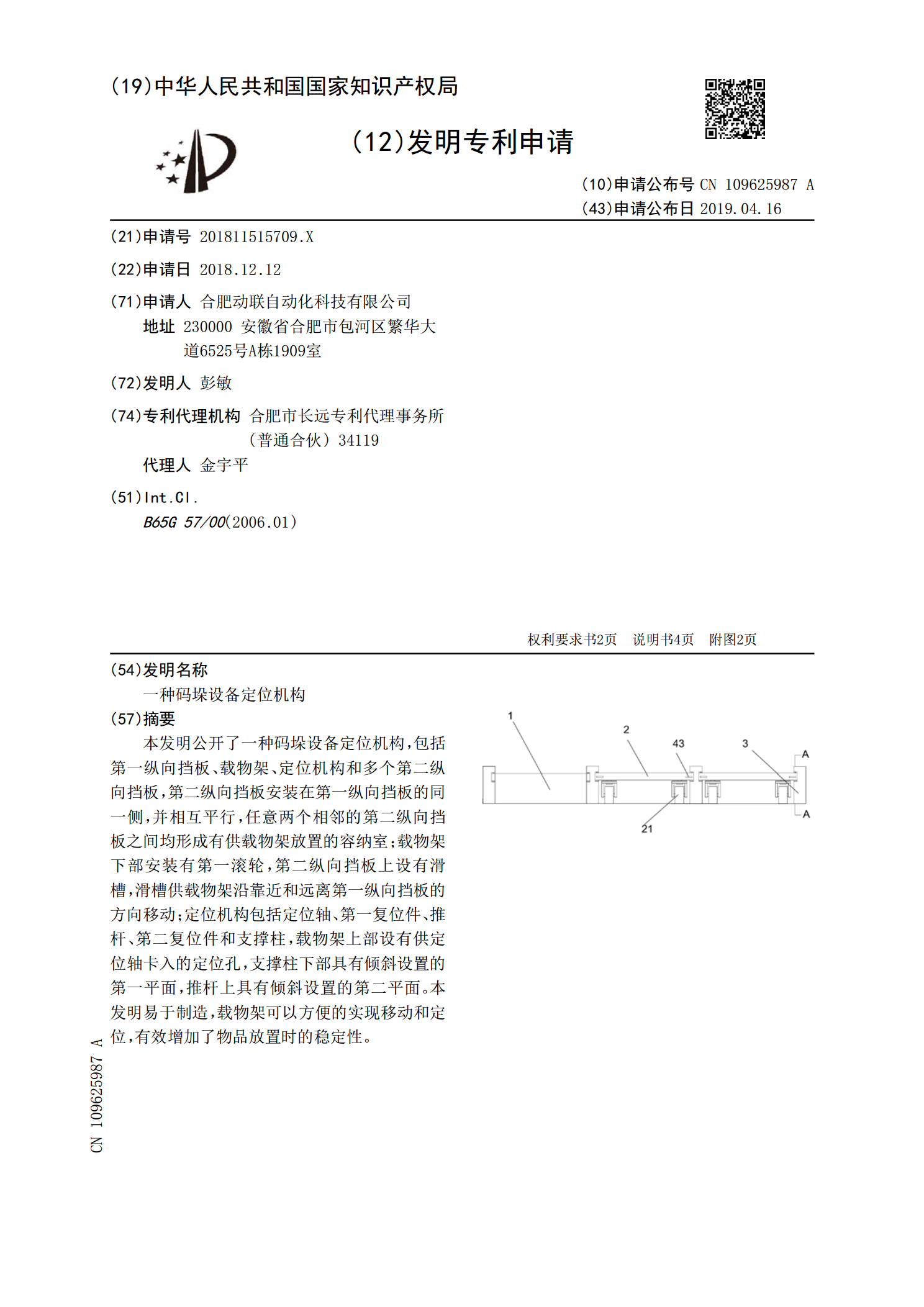
本发明公开了一种码垛设备定位机构,包括第一纵向挡板、载物架、定位机构和多个第二纵向挡板,第二纵向挡板安装在第一纵向挡板的同一侧,并相互平行,任意两个相邻的第二纵向挡板之间均形成有供载物架放置的容纳室;载物架下部安装有第一滚轮,第二纵向挡板上设有滑槽,滑槽供载物架沿靠近和远离第一纵向挡板的方向移动;定位机构包括定位轴、第一复位件、推杆、第二复位件和支撑柱,载物架上部设有供定位轴卡入的定位孔,支撑柱下部具有倾斜设置的第一平面,推杆上具有倾斜设置的第二平面。本发明易于制造,载物架可以方便的实现移动和定位,有效增