
一种下肢外骨骼机器人.pdf

努力****妙风

1/6
2/6
3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种人体下肢外骨骼机器人.pdf
本发明公开了一种人体下肢外骨骼机器人;包括机械机构和控制系统,所述机械机构包括背板和固定架;所述背板靠近底部的一侧与所述固定架连接,所述固定架为一个四边形的框架,用于固定在人体的腰腹处;所述固定架的两侧对称设有大腿杆,所述大腿杆的下方连接有小腿杆;所述小腿杆底部连接测力鞋;通过弹性组件改变下蹲或者弹跳中的支撑力,运动恢复之后时增加助力,通过可变刚性支撑,增加使用舒适度,减小对穿戴者运动幅度的束缚,提升穿戴者恢复效率;通过对足底压力数据的分析处理,对足底压力角度进行纠正,对于压力值提取更加精确,减小行为误差
一种下肢外骨骼机器人.pdf
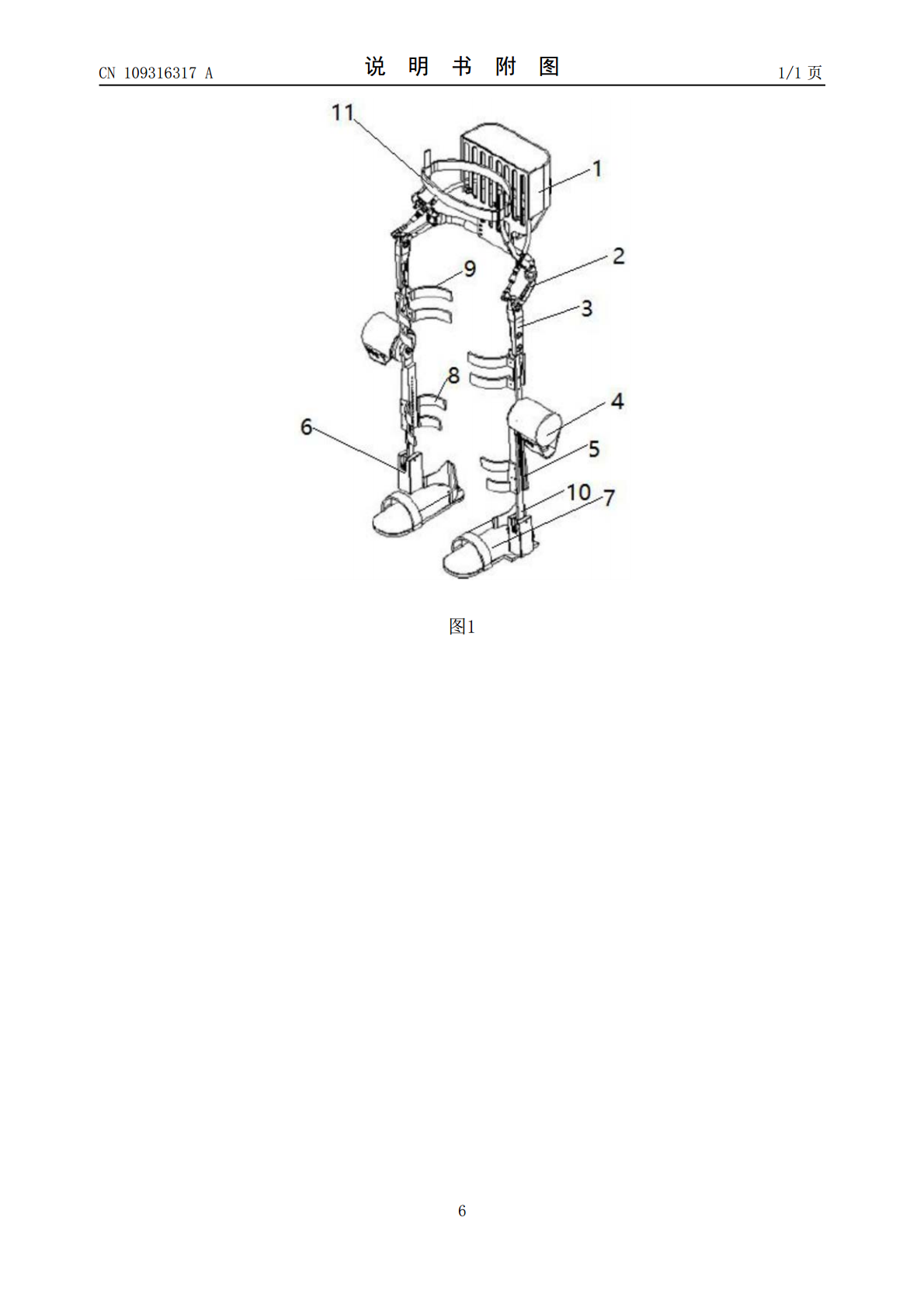
本发明公开了一种下肢外骨骼机器人,包括背部缓冲囊,所述背部缓冲囊两侧下端通过背部支撑杆连接有大腿杆件,所述大腿杆件下端通过膝关节驱动电机连接有小腿杆件,所述小腿杆件下端通过电动伸缩杆连接有支撑块,所述支撑块下端设有脚套,所述背部缓冲囊内填充有缓冲材料,还包括大腿卡片、小腿卡片,所述大腿卡片、小腿卡片均为弧形,分别通过U形卡套与所述大腿杆件、小腿杆件活动连接;所述支撑块上端通过带伺服装置的万向节与所述电动伸缩杆的下端相连。本发明结构简单,操作方便,可根据三维数字罗盘进行大腿杆件、小腿杆件以及脚套之间角度的实
下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人.pdf
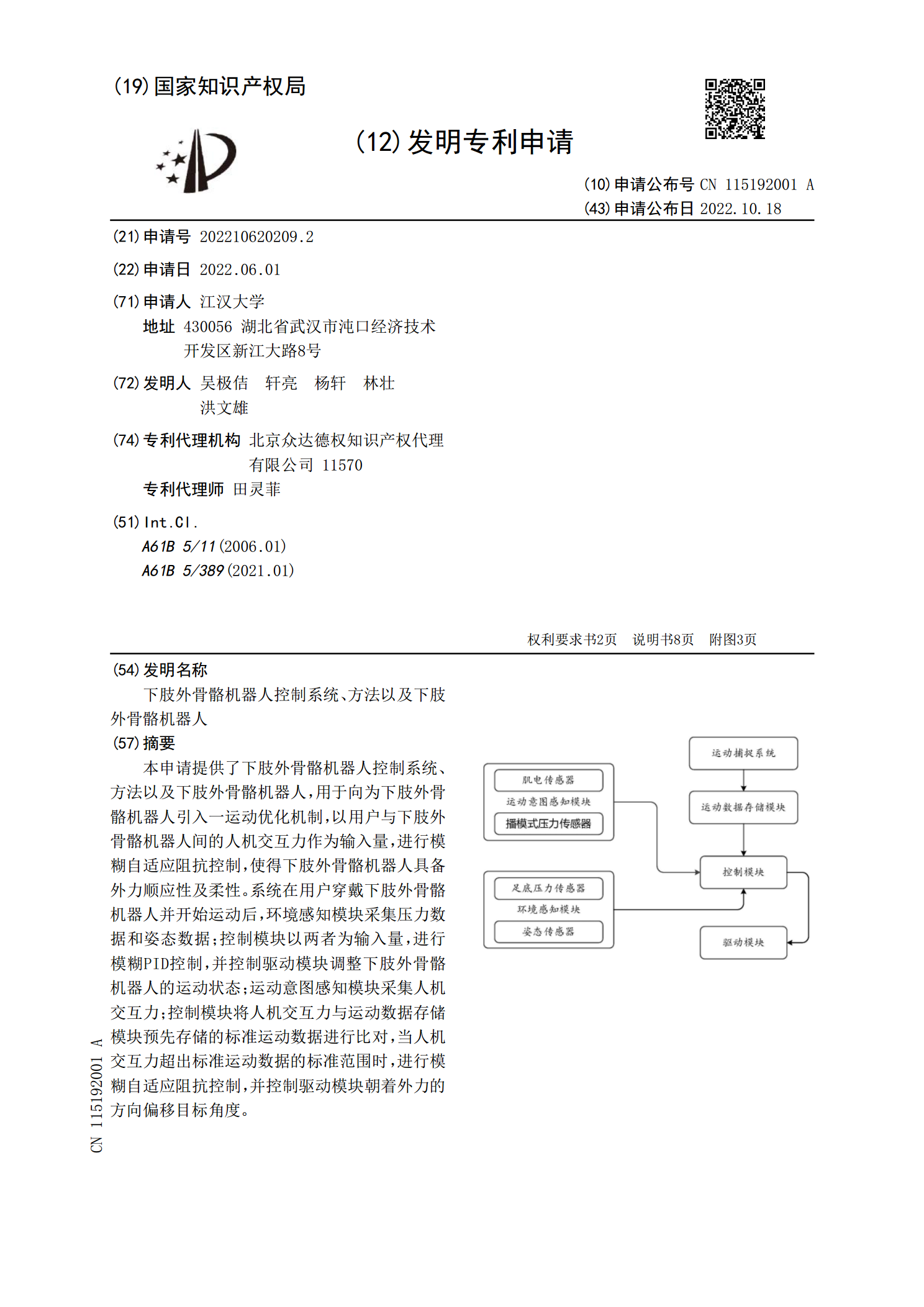
本申请提供了下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人,用于向为下肢外骨骼机器人引入一运动优化机制,以用户与下肢外骨骼机器人间的人机交互力作为输入量,进行模糊自适应阻抗控制,使得下肢外骨骼机器人具备外力顺应性及柔性。系统在用户穿戴下肢外骨骼机器人并开始运动后,环境感知模块采集压力数据和姿态数据;控制模块以两者为输入量,进行模糊PID控制,并控制驱动模块调整下肢外骨骼机器人的运动状态;运动意图感知模块采集人机交互力;控制模块将人机交互力与运动数据存储模块预先存储的标准运动数据进行比对,当人机交互力超
一种无动力下肢外骨骼机器人.pdf
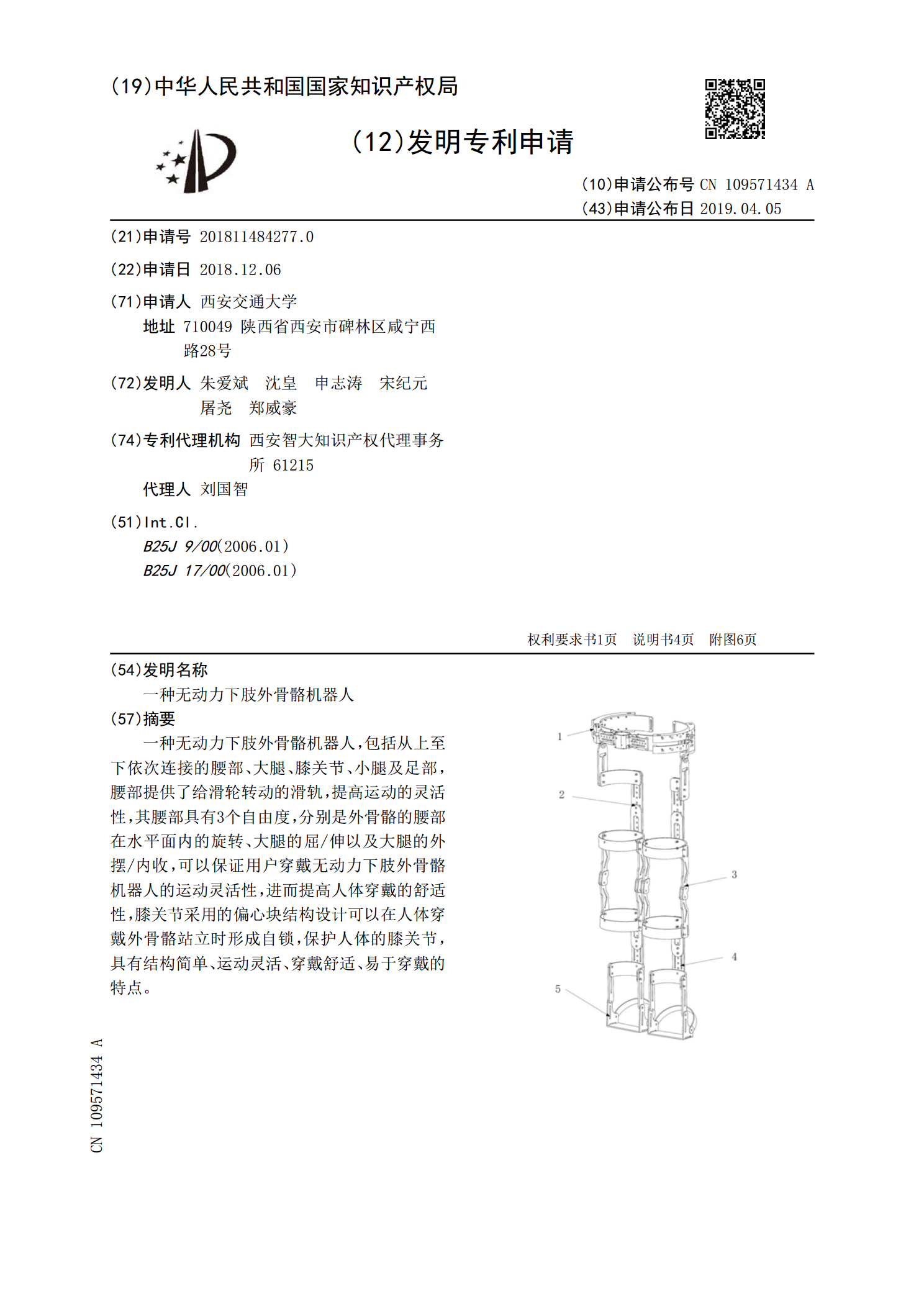
一种无动力下肢外骨骼机器人,包括从上至下依次连接的腰部、大腿、膝关节、小腿及足部,腰部提供了给滑轮转动的滑轨,提高运动的灵活性,其腰部具有3个自由度,分别是外骨骼的腰部在水平面内的旋转、大腿的屈/伸以及大腿的外摆/内收,可以保证用户穿戴无动力下肢外骨骼机器人的运动灵活性,进而提高人体穿戴的舒适性,膝关节采用的偏心块结构设计可以在人体穿戴外骨骼站立时形成自锁,保护人体的膝关节,具有结构简单、运动灵活、穿戴舒适、易于穿戴的特点。

一种可变刚度下肢外骨骼助力机器人.pdf
本发明公开了一种可变刚度下肢外骨骼助力机器人,用以穿戴在人体下肢上,包括腰部机构、髋部机构、膝部机构;通过腰部机构上的驱动电机和驱动盘作为驱动源,而将驱动套索索正转或者反转,带动下方膝部机构的输入盘正转或者反转,而使输入盘相对输出盘转动达到带动膝部关节的转动。膝部机构的输入盘与输出盘之间采用滑轮及钢丝绳形成变刚度调节作用。而调整滑轮组数就可以增加或减少关节的刚度范围,改变关节的刚度特性。使用该变刚度机构驱动,刚度可以在行走过程中主动变化,使外骨骼具有柔顺性更好,安全性更高、适应性更好、机构紧凑简单的优点。