
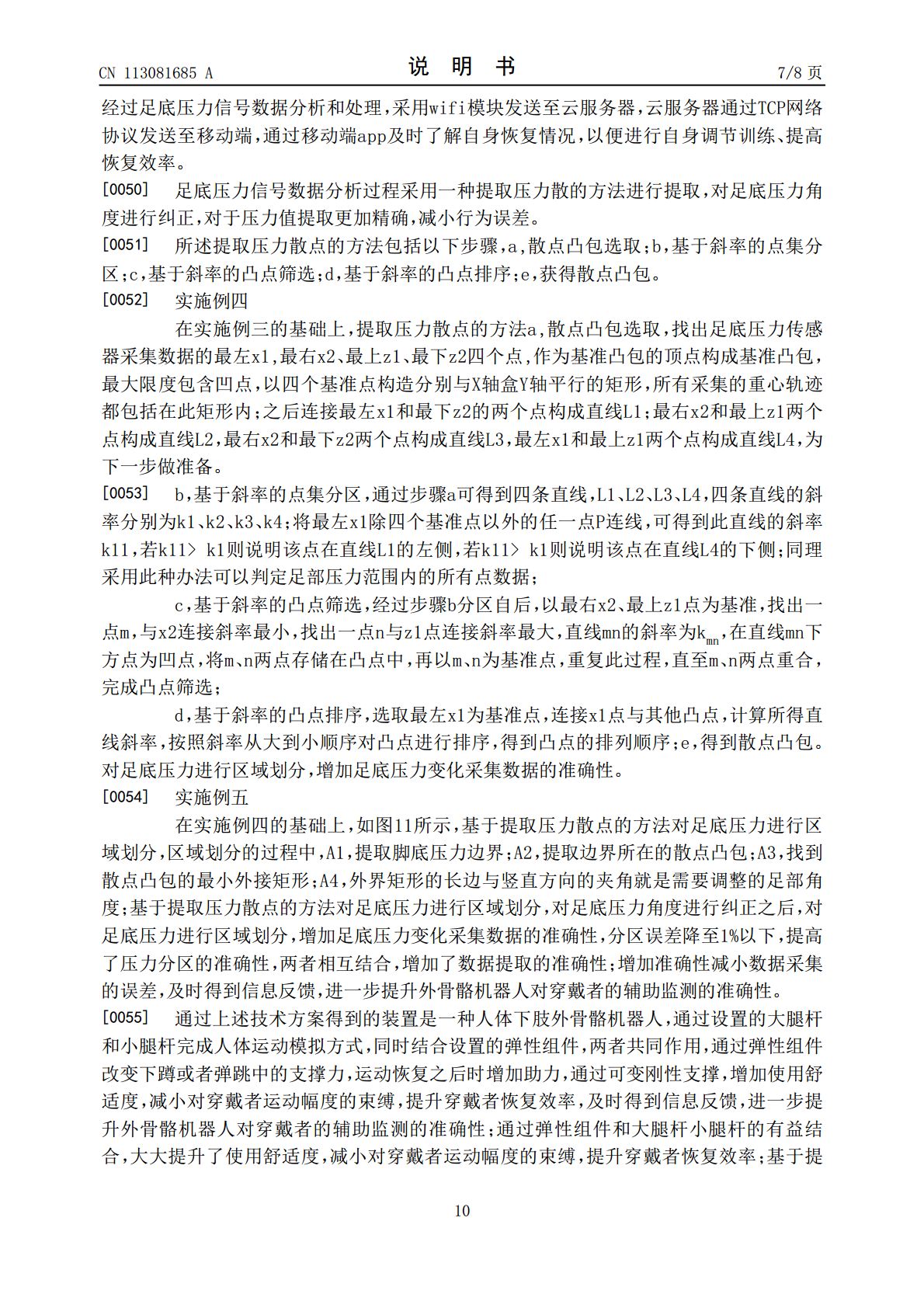
一种人体下肢外骨骼机器人.pdf

念珊****写意


1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种人体下肢外骨骼机器人.pdf
本发明公开了一种人体下肢外骨骼机器人;包括机械机构和控制系统,所述机械机构包括背板和固定架;所述背板靠近底部的一侧与所述固定架连接,所述固定架为一个四边形的框架,用于固定在人体的腰腹处;所述固定架的两侧对称设有大腿杆,所述大腿杆的下方连接有小腿杆;所述小腿杆底部连接测力鞋;通过弹性组件改变下蹲或者弹跳中的支撑力,运动恢复之后时增加助力,通过可变刚性支撑,增加使用舒适度,减小对穿戴者运动幅度的束缚,提升穿戴者恢复效率;通过对足底压力数据的分析处理,对足底压力角度进行纠正,对于压力值提取更加精确,减小行为误差

下肢外骨骼【人体下肢外骨骼仿生】.docx
下肢外骨骼【人体下肢外骨骼仿生】人体下肢外骨骼机理分析xx(xx,xxxx,xxxx)摘要:本论文研究穿戴型下肢外骨骼机器人机构。所研究的外骨骼是一种可以穿戴于人体的机械装置。这种外骨骼依靠人的运动信息来控制机器人,通过机器人来完成仅靠人的自身能力无法单独完成的远行、负重等任务。这种外骨骼也可以用来检测人体运动信息,作为康复医疗器械使用。下肢穿戴外骨骼机器人是一种具有双足步行特征的典型的人机一体化系统。关键词:穿戴外骨骼;助力机器人;机构设计;仿真分析ANALYSISANDDESIGNOFLOWEREXT
人体下肢康复外骨骼机器人仿真分析与实验.pptx
,目录PartOnePartTwo人体下肢康复外骨骼机器人的概念外骨骼机器人的应用领域外骨骼机器人的发展现状PartThree人体下肢运动学分析外骨骼机器人动力学分析外骨骼机器人控制系统设计外骨骼机器人材料选择与优化PartFour实验目的与实验方法实验结果与分析实验结论与改进建议PartFive外骨骼机器人技术发展趋势外骨骼机器人在康复医学领域的应用前景外骨骼机器人在其他领域的应用前景PartSix结论总结对外骨骼机器人研究的建议THANKS

人体下肢康复外骨骼机器人仿真分析与实验.docx
人体下肢康复外骨骼机器人仿真分析与实验人体下肢康复外骨骼机器人仿真分析与实验摘要:随着现代社会的快速发展,人们对康复治疗和健康管理的需求不断增加,而外骨骼机器人作为辅助康复的新兴技术,受到了广泛关注。本论文研究了人体下肢康复外骨骼机器人的仿真分析与实验,在仿真环境中对机器人运动学和动力学参数进行了分析,同时进行了实验验证。研究结果表明,外骨骼机器人可以有效辅助下肢康复治疗,提高康复效果。关键词:外骨骼机器人,康复治疗,仿真分析,实验验证1.引言下肢康复是一种重要的医学手段,对于中风、脊髓损伤和运动障碍等疾
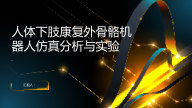
一种下肢外骨骼机器人.pdf
本发明公开了一种下肢外骨骼机器人,包括背部缓冲囊,所述背部缓冲囊两侧下端通过背部支撑杆连接有大腿杆件,所述大腿杆件下端通过膝关节驱动电机连接有小腿杆件,所述小腿杆件下端通过电动伸缩杆连接有支撑块,所述支撑块下端设有脚套,所述背部缓冲囊内填充有缓冲材料,还包括大腿卡片、小腿卡片,所述大腿卡片、小腿卡片均为弧形,分别通过U形卡套与所述大腿杆件、小腿杆件活动连接;所述支撑块上端通过带伺服装置的万向节与所述电动伸缩杆的下端相连。本发明结构简单,操作方便,可根据三维数字罗盘进行大腿杆件、小腿杆件以及脚套之间角度的实