
盲人智能拐杖及其控制方法.pdf

含秀****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
盲人智能拐杖及其控制方法.pdf
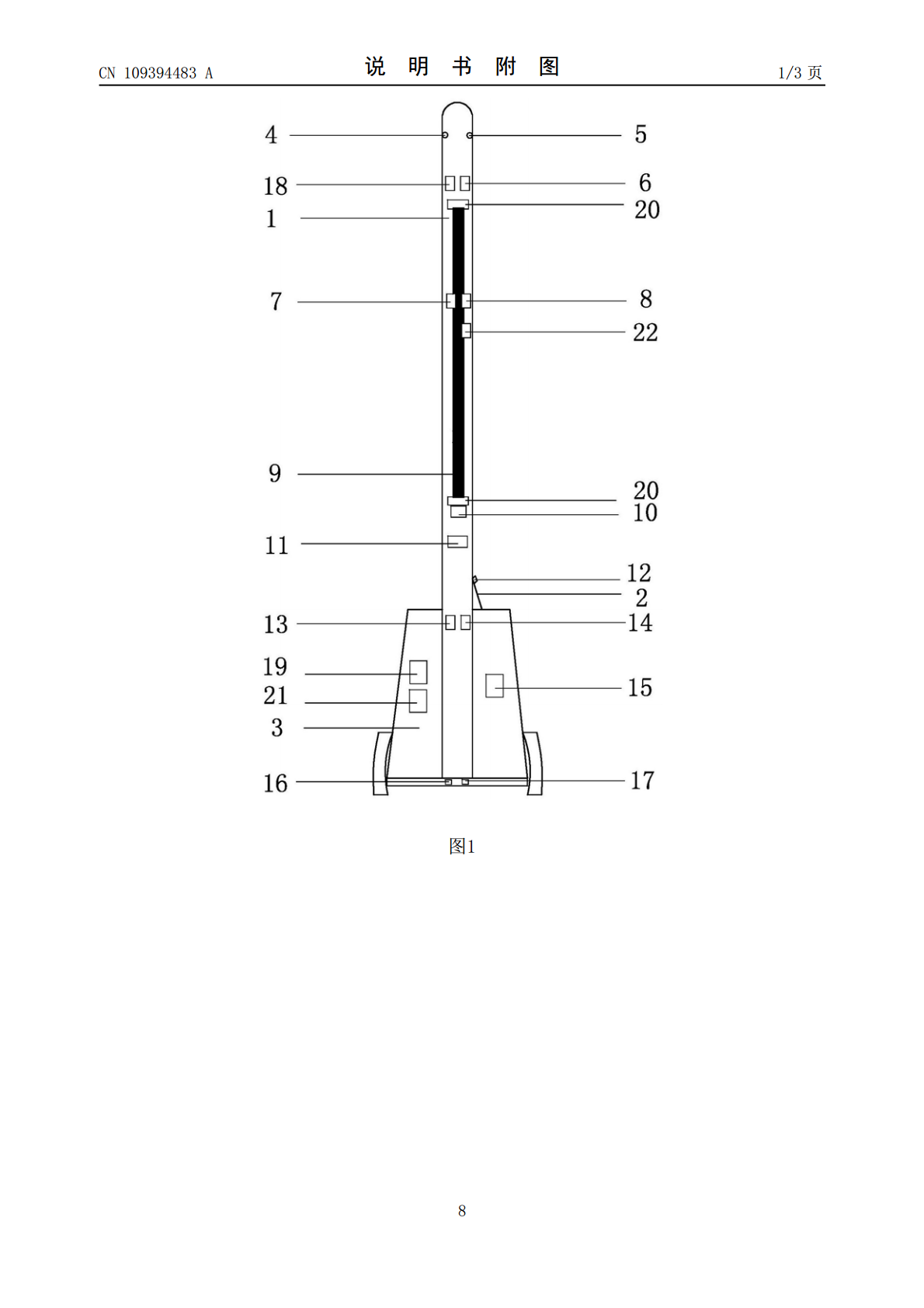
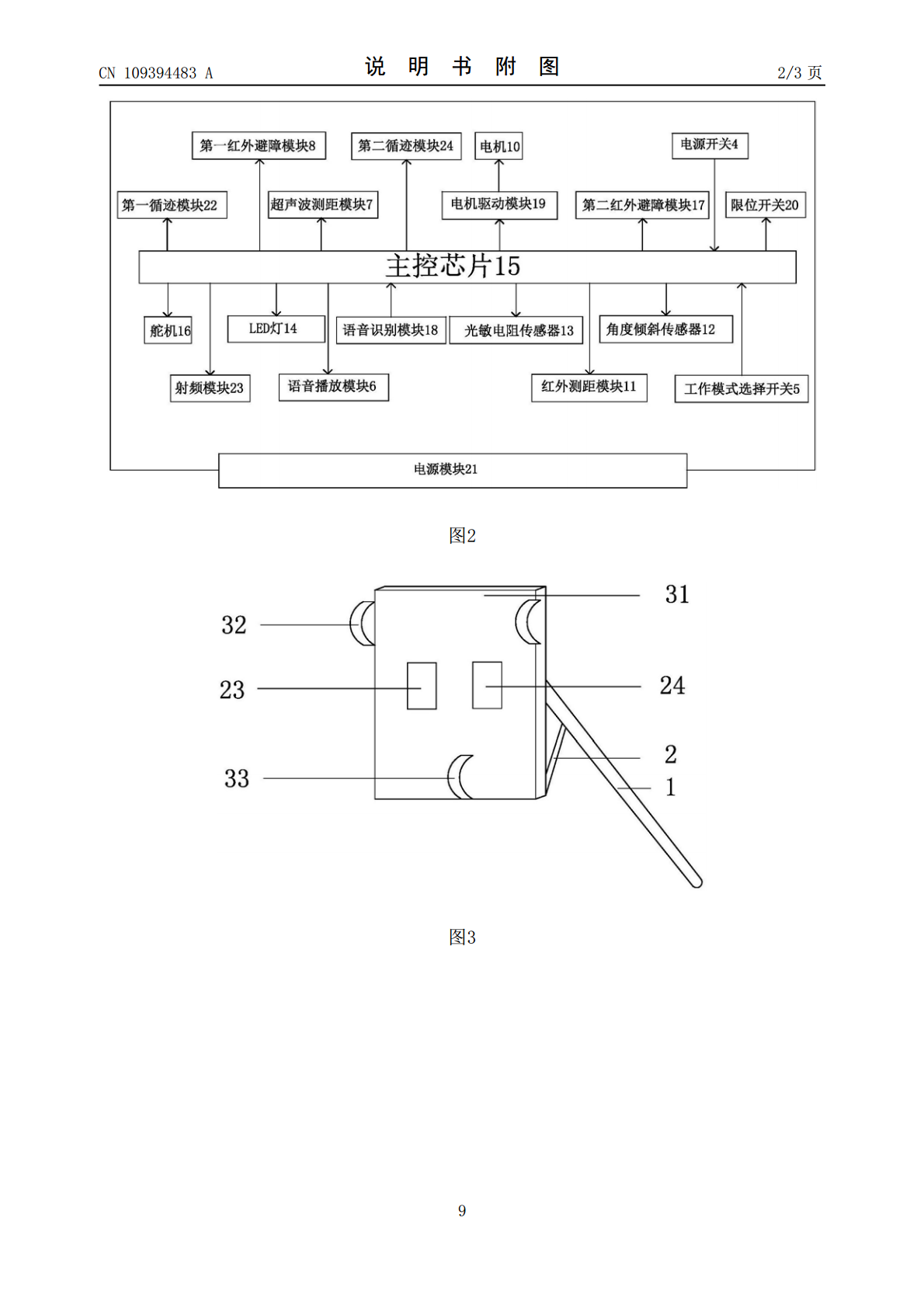
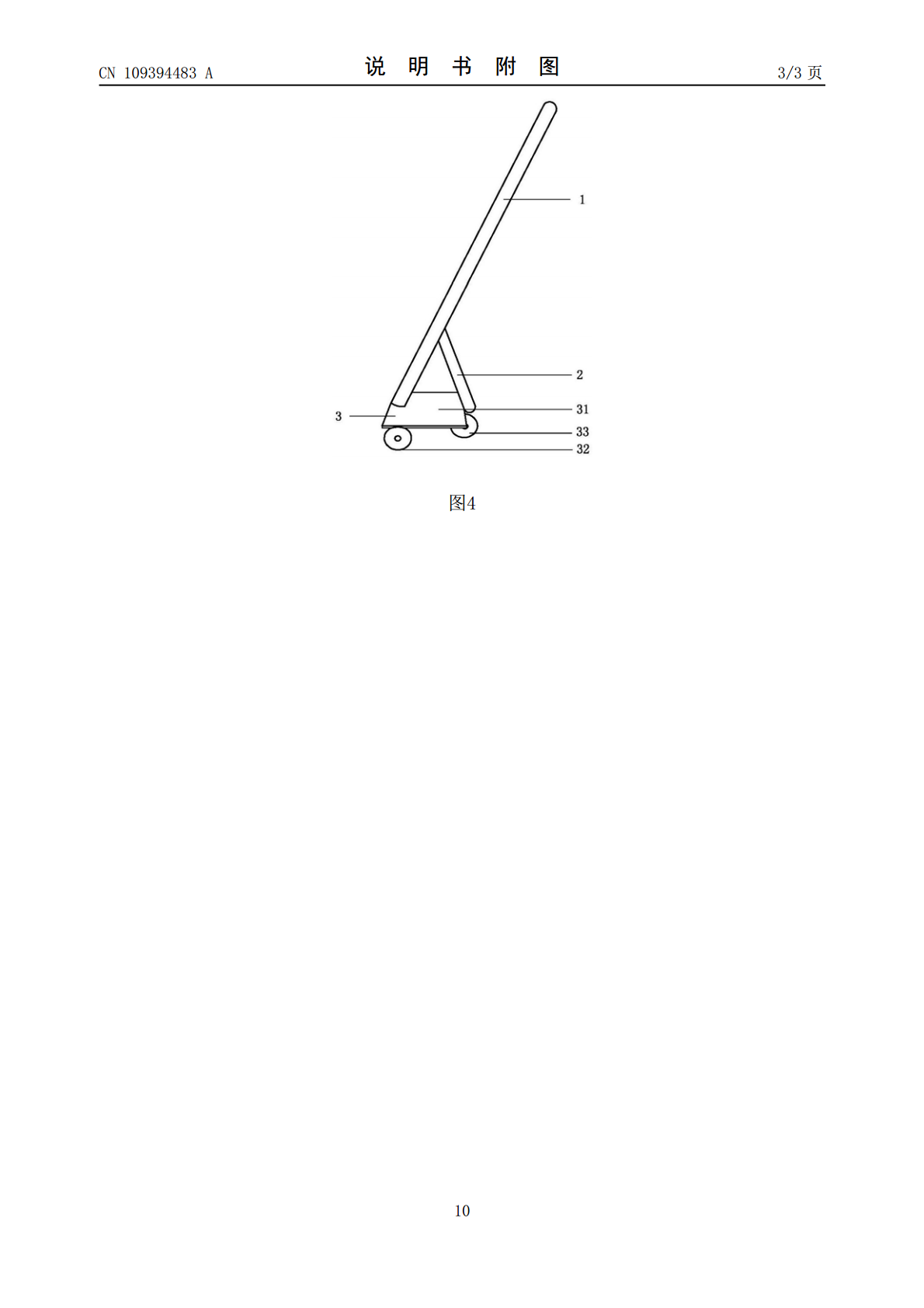
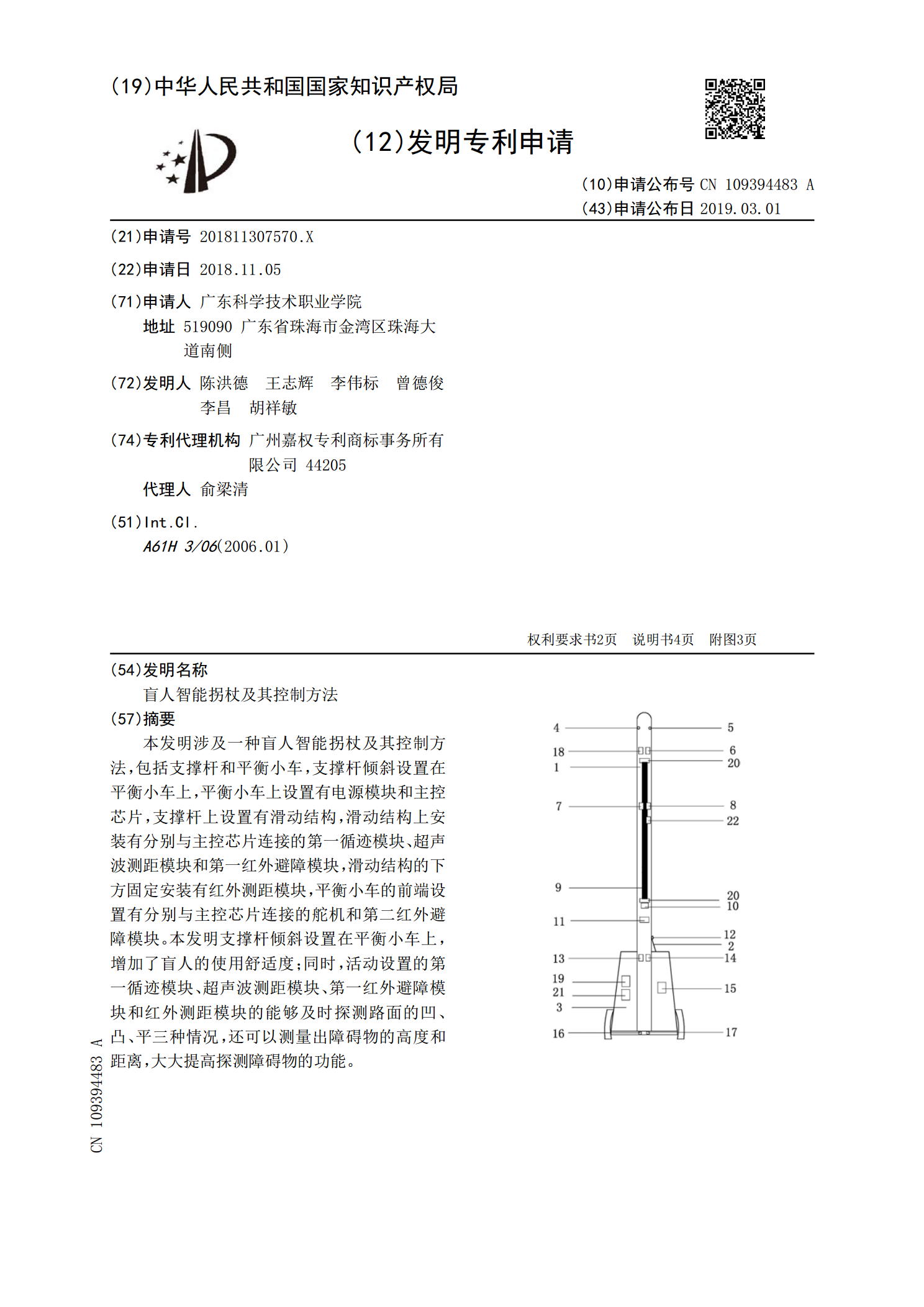
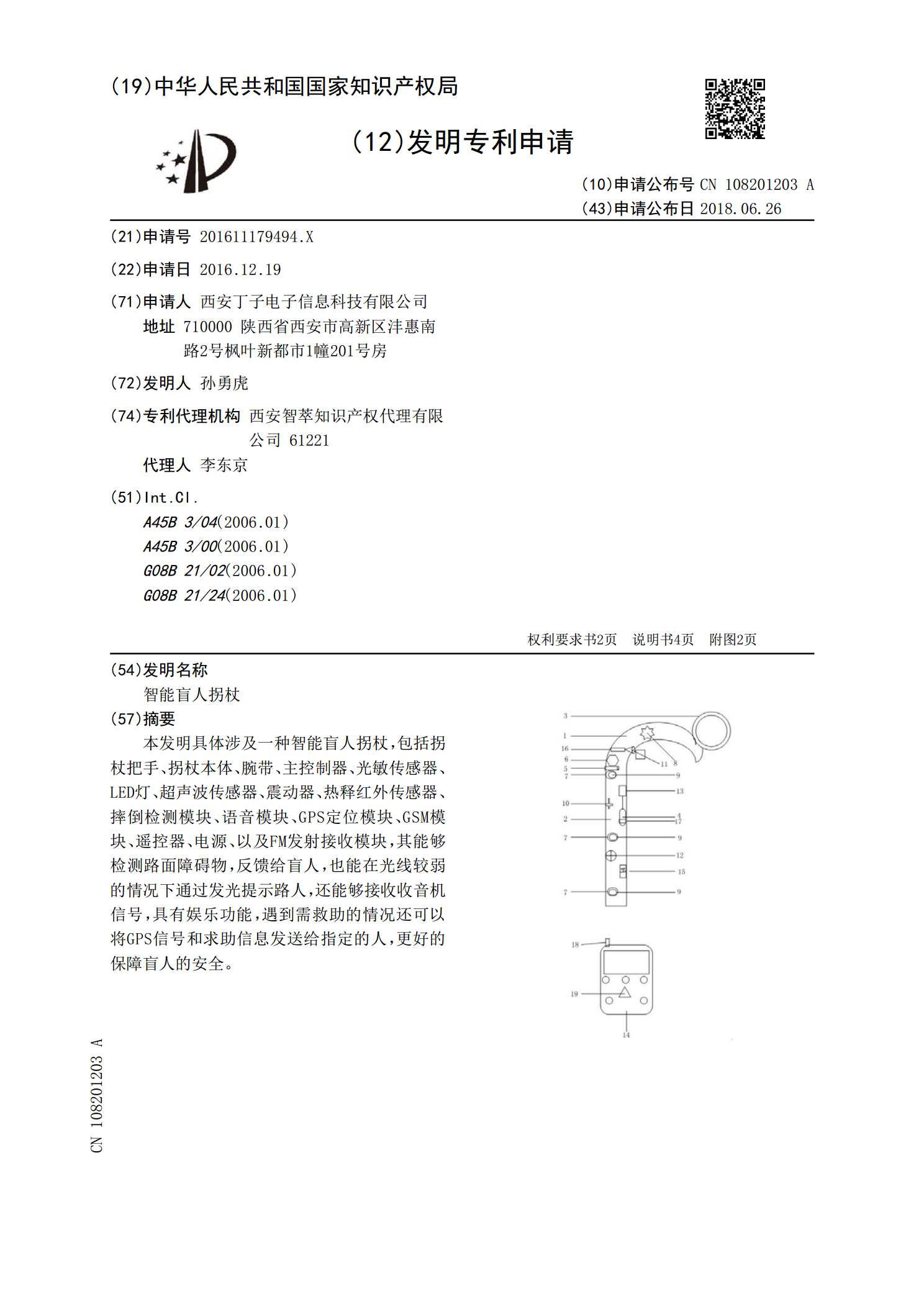
本发明涉及一种盲人智能拐杖及其控制方法,包括支撑杆和平衡小车,支撑杆倾斜设置在平衡小车上,平衡小车上设置有电源模块和主控芯片,支撑杆上设置有滑动结构,滑动结构上安装有分别与主控芯片连接的第一循迹模块、超声波测距模块和第一红外避障模块,滑动结构的下方固定安装有红外测距模块,平衡小车的前端设置有分别与主控芯片连接的舵机和第二红外避障模块。本发明支撑杆倾斜设置在平衡小车上,增加了盲人的使用舒适度;同时,活动设置的第一循迹模块、超声波测距模块、第一红外避障模块和红外测距模块的能够及时探测路面的凹、凸、平三种情况,
智能盲人拐杖.pdf
本发明具体涉及一种智能盲人拐杖,包括拐杖把手、拐杖本体、腕带、主控制器、光敏传感器、LED灯、超声波传感器、震动器、热释红外传感器、摔倒检测模块、语音模块、GPS定位模块、GSM模块、遥控器、电源、以及FM发射接收模块,其能够检测路面障碍物,反馈给盲人,也能在光线较弱的情况下通过发光提示路人,还能够接收收音机信号,具有娱乐功能,遇到需救助的情况还可以将GPS信号和求助信息发送给指定的人,更好的保障盲人的安全。
一种盲人辅助拐杖以及基于盲人辅助拐杖的拐杖控制方法.pdf
本申请公开了一种盲人辅助拐杖以及基于盲人辅助拐杖的拐杖控制方法,包括:拐杖体和握柄;所述拐杖体与所述握柄机械连接,所述拐杖体用于实时识别目标物,以及每个所述目标物的目标距离,并基于所述目标物以及所述目标距离生成控制信号,将所述控制信号发送至所述握柄,其中,所述目标距离为所述目标物与所述盲人辅助拐杖之间的距离;所述握柄用于接收所述控制信号,并基于所述控制信号确定输出动作,以使盲人依据所述输出动作确定行进方向。可以使盲人直接根据握柄的输出动作确定行进方向,简单方便,在满足盲人安全行走需求的同时,有利于提升盲人
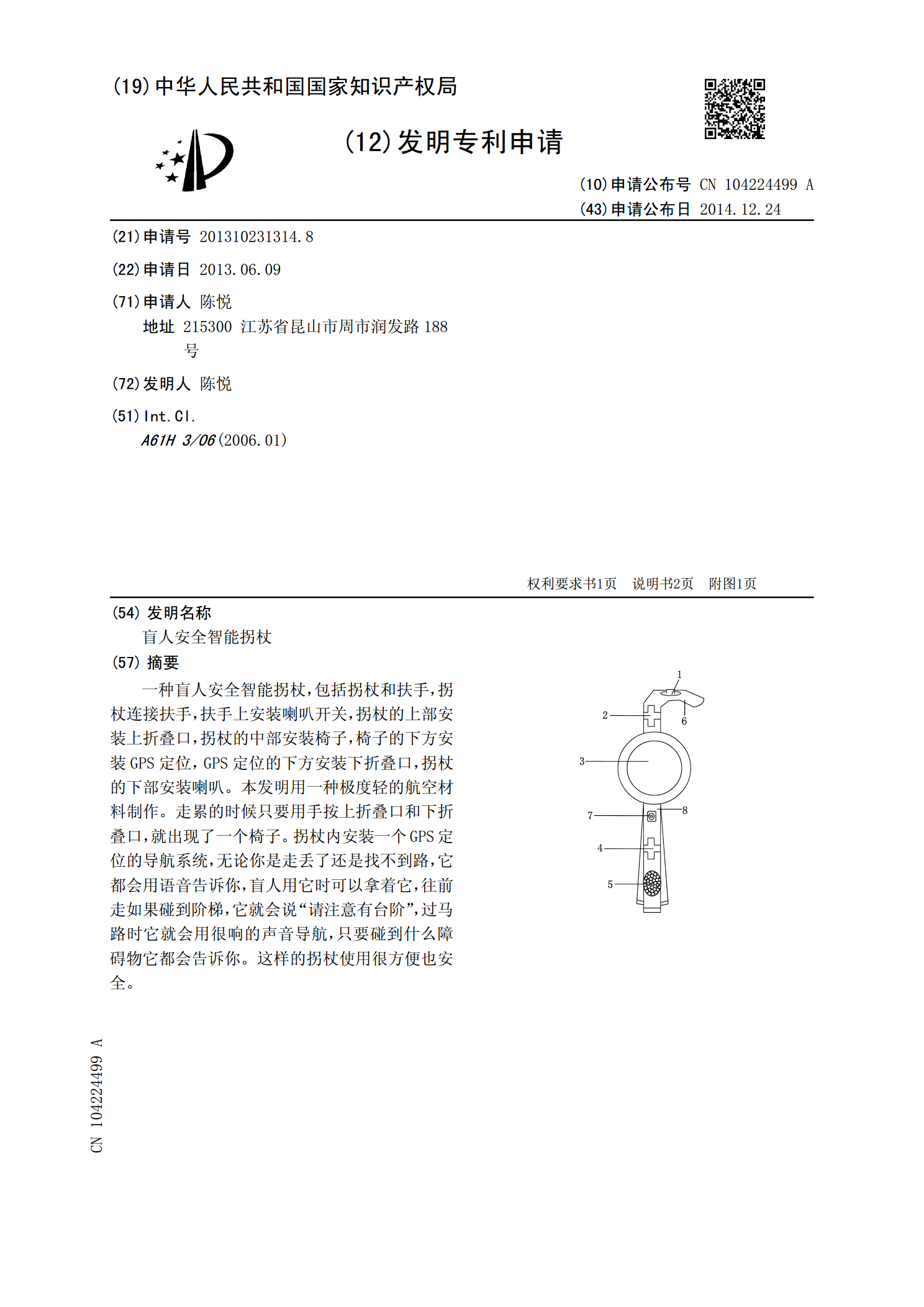
盲人安全智能拐杖.pdf
一种盲人安全智能拐杖,包括拐杖和扶手,拐杖连接扶手,扶手上安装喇叭开关,拐杖的上部安装上折叠口,拐杖的中部安装椅子,椅子的下方安装GPS定位,GPS定位的下方安装下折叠口,拐杖的下部安装喇叭。本发明用一种极度轻的航空材料制作。走累的时候只要用手按上折叠口和下折叠口,就出现了一个椅子。拐杖内安装一个GPS定位的导航系统,无论你是走丢了还是找不到路,它都会用语音告诉你,盲人用它时可以拿着它,往前走如果碰到阶梯,它就会说“请注意有台阶”,过马路时它就会用很响的声音导航,只要碰到什么障碍物它都会告诉你。这样的拐杖
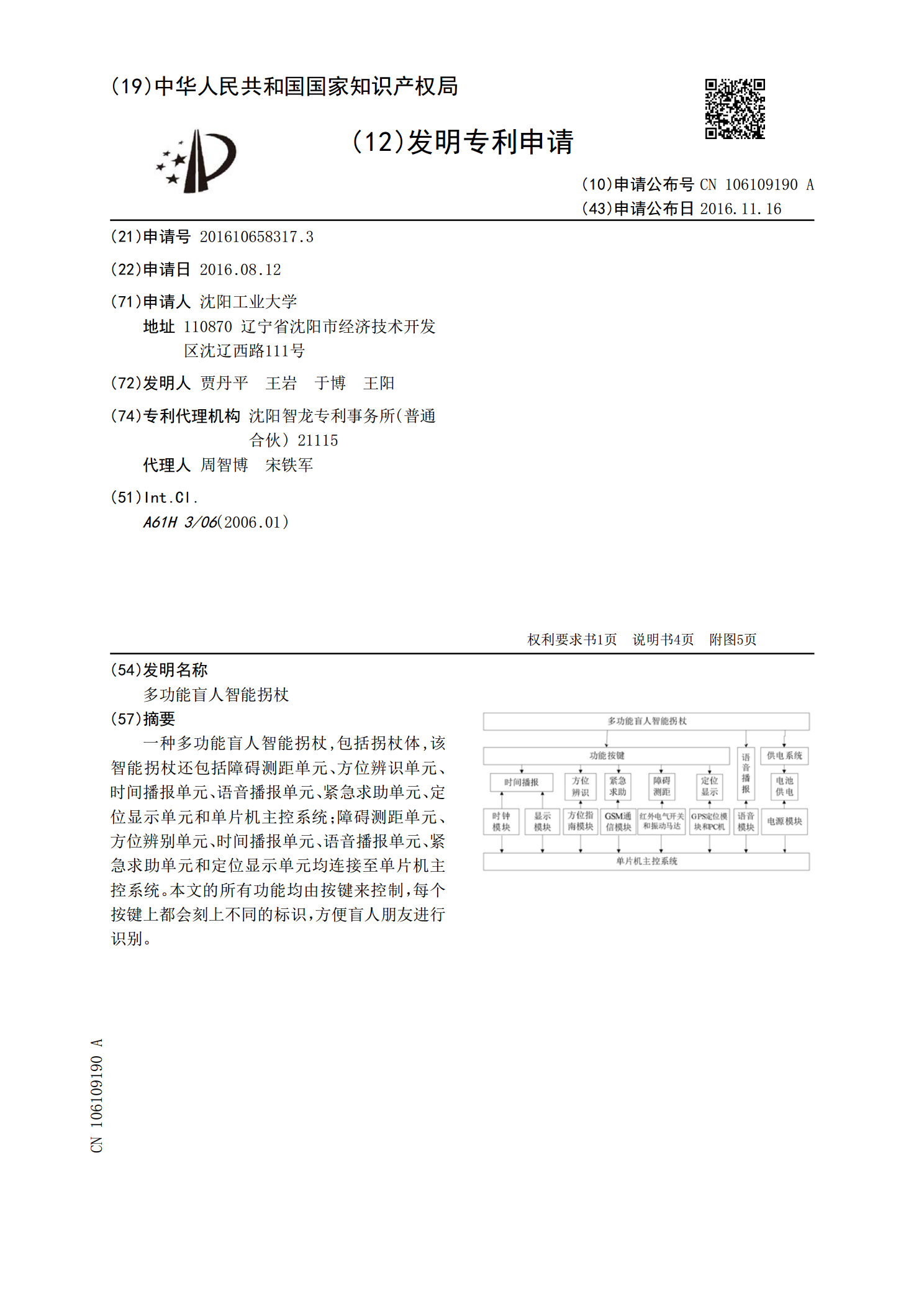
多功能盲人智能拐杖.pdf
一种多功能盲人智能拐杖,包括拐杖体,该智能拐杖还包括障碍测距单元、方位辨识单元、时间播报单元、语音播报单元、紧急求助单元、定位显示单元和单片机主控系统;障碍测距单元、方位辨别单元、时间播报单元、语音播报单元、紧急求助单元和定位显示单元均连接至单片机主控系统。本文的所有功能均由按键来控制,每个按键上都会刻上不同的标识,方便盲人朋友进行识别。