
一种盲人辅助拐杖以及基于盲人辅助拐杖的拐杖控制方法.pdf

一吃****天材

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种盲人辅助拐杖以及基于盲人辅助拐杖的拐杖控制方法.pdf
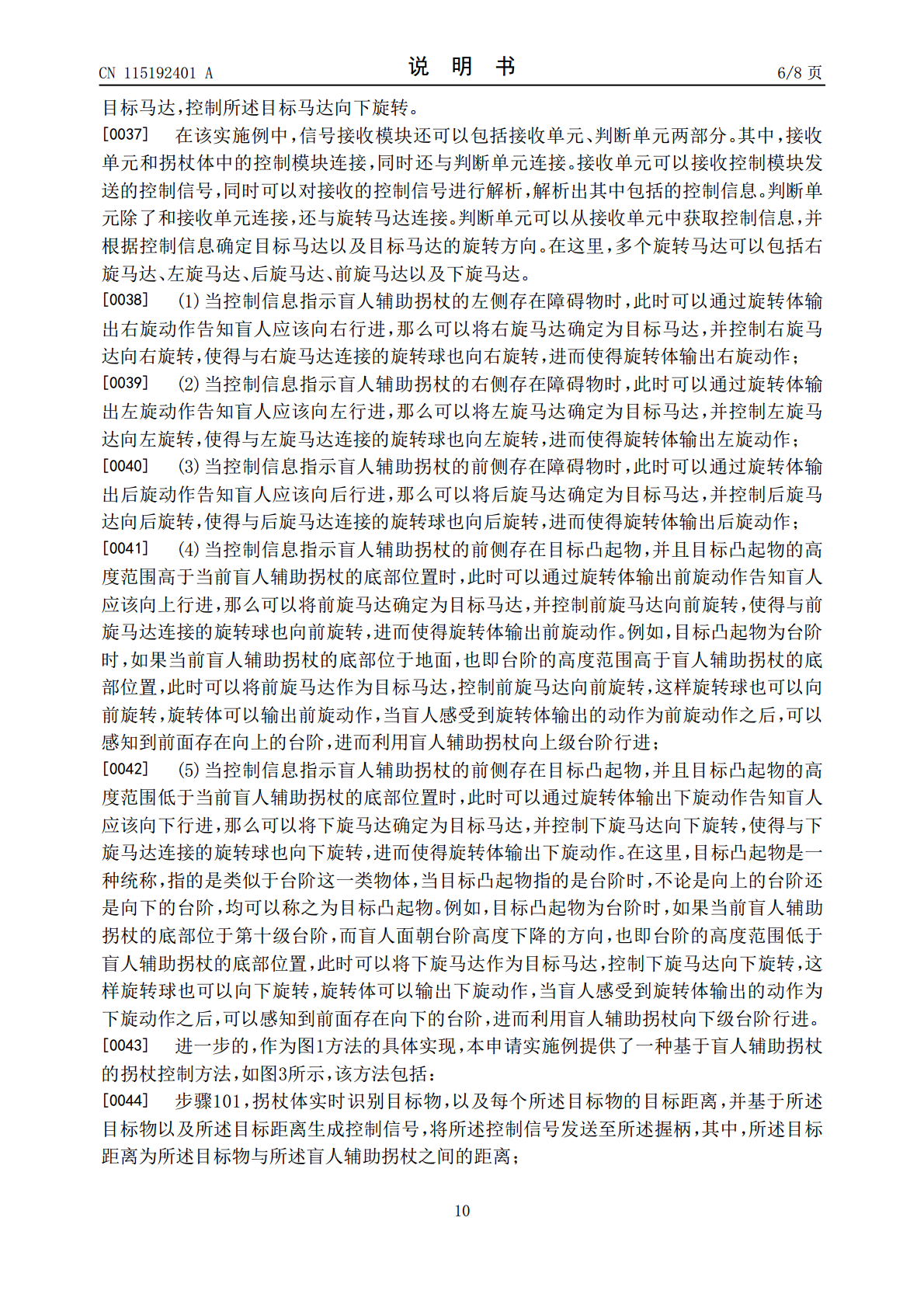
本申请公开了一种盲人辅助拐杖以及基于盲人辅助拐杖的拐杖控制方法,包括:拐杖体和握柄;所述拐杖体与所述握柄机械连接,所述拐杖体用于实时识别目标物,以及每个所述目标物的目标距离,并基于所述目标物以及所述目标距离生成控制信号,将所述控制信号发送至所述握柄,其中,所述目标距离为所述目标物与所述盲人辅助拐杖之间的距离;所述握柄用于接收所述控制信号,并基于所述控制信号确定输出动作,以使盲人依据所述输出动作确定行进方向。可以使盲人直接根据握柄的输出动作确定行进方向,简单方便,在满足盲人安全行走需求的同时,有利于提升盲人
盲人拐杖.pdf
本发明公布的盲人拐杖,由感应器(1)、拐杖(2)、提醒器(3)、手柄(4)、警报器(5)所组成,感应器(1)与拐杖(2)相连接、位于拐杖(2)的最下端,提醒器(3)固定在拐杖(2)上,手柄(4)与拐杖(2)相连接,警报器(5)固定在手柄(4)上。本发明的优点:制作简单,成本低廉;使用方便、安全可靠;能及时提醒人们注意有盲人过来;能有效告知盲人前方道路的状况。
盲人拐杖.pdf
本发明涉及一种盲人拐杖,包括可开启且空心的手柄、杖杆,手柄与杖杆连接,杖杆底端连接不倒装置,所述手柄前端设有微孔摄像头、光感应器,手柄上端设有语音导航装置,手柄后端设有警示灯,手柄内设有跌倒自动报警装置,控制器,电池,光感应器与控制器连接,控制器与警示灯连接,所述杖杆表面设有太阳能电池板,所述语音导航装置、微孔摄像头、光感应器、警示灯、跌倒自动报警装置,控制器、太阳能电池板均分别与电池连接,这样就解决了盲人外出行走不便利、不安全的问题。
盲人拐杖.pdf
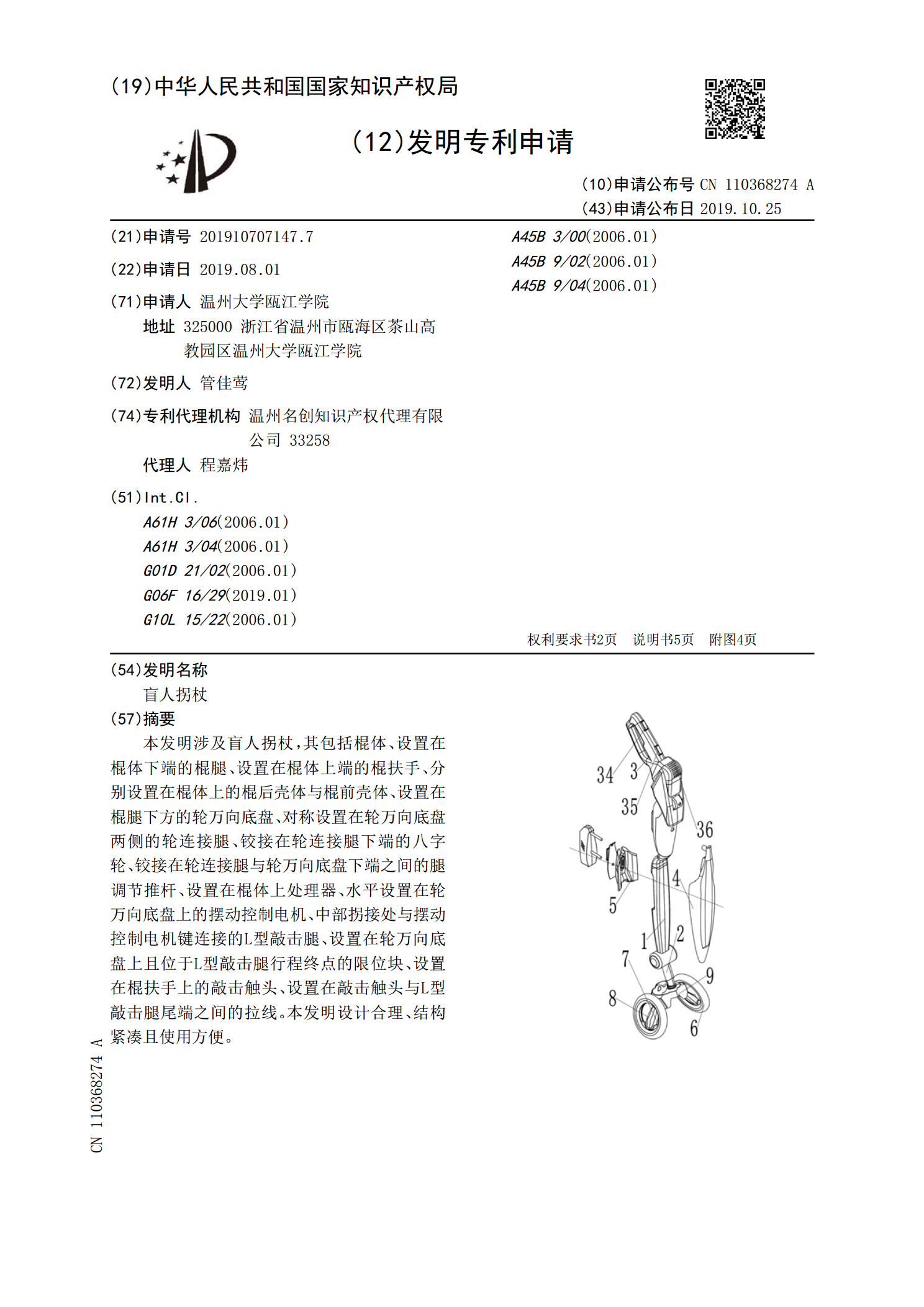
本发明涉及盲人拐杖,其包括棍体、设置在棍体下端的棍腿、设置在棍体上端的棍扶手、分别设置在棍体上的棍后壳体与棍前壳体、设置在棍腿下方的轮万向底盘、对称设置在轮万向底盘两侧的轮连接腿、铰接在轮连接腿下端的八字轮、铰接在轮连接腿与轮万向底盘下端之间的腿调节推杆、设置在棍体上处理器、水平设置在轮万向底盘上的摆动控制电机、中部拐接处与摆动控制电机键连接的L型敲击腿、设置在轮万向底盘上且位于L型敲击腿行程终点的限位块、设置在棍扶手上的敲击触头、设置在敲击触头与L型敲击腿尾端之间的拉线。本发明设计合理、结构紧凑且使用方
盲人拐杖.pdf
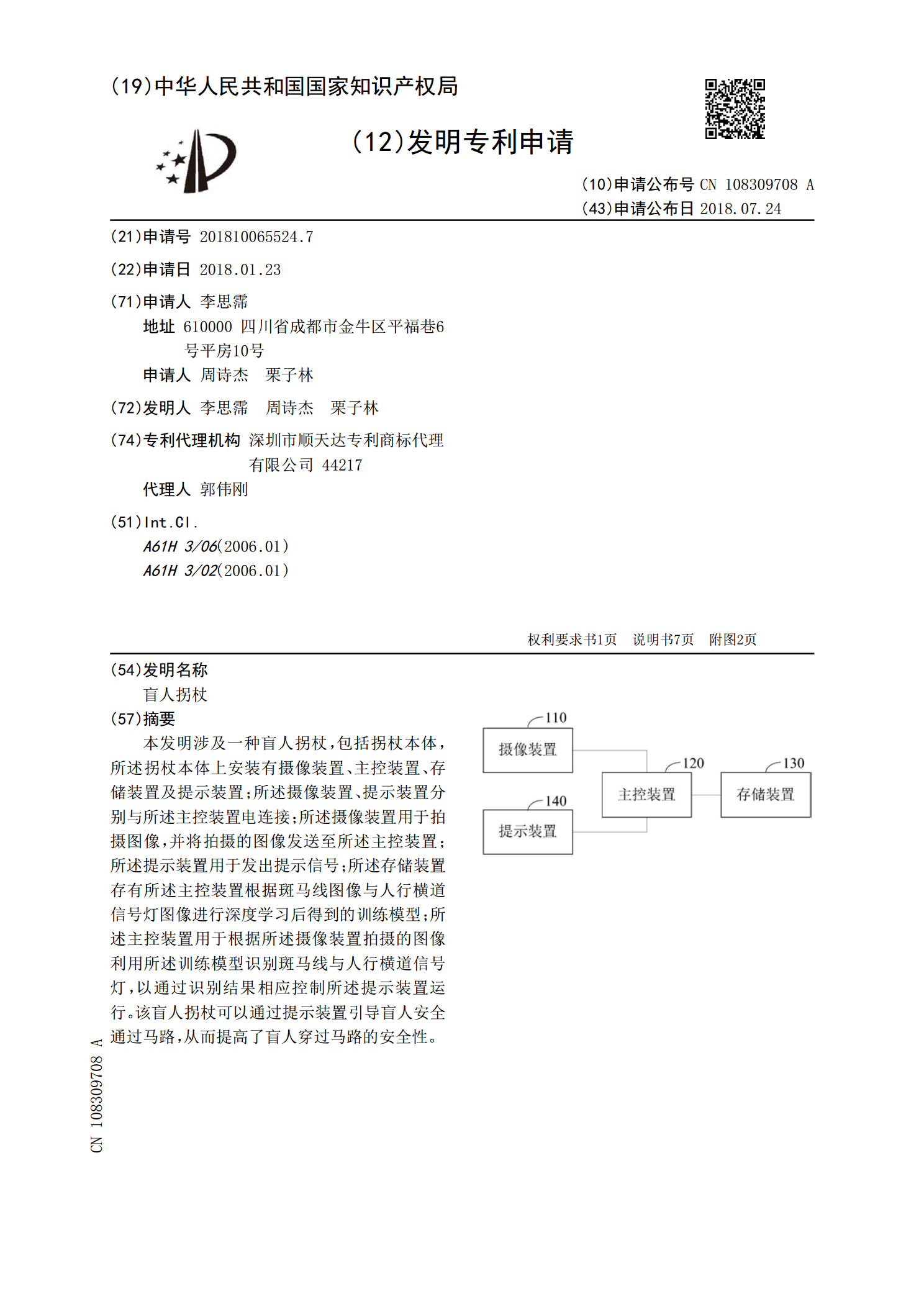
本发明涉及一种盲人拐杖,包括拐杖本体,所述拐杖本体上安装有摄像装置、主控装置、存储装置及提示装置;所述摄像装置、提示装置分别与所述主控装置电连接;所述摄像装置用于拍摄图像,并将拍摄的图像发送至所述主控装置;所述提示装置用于发出提示信号;所述存储装置存有所述主控装置根据斑马线图像与人行横道信号灯图像进行深度学习后得到的训练模型;所述主控装置用于根据所述摄像装置拍摄的图像利用所述训练模型识别斑马线与人行横道信号灯,以通过识别结果相应控制所述提示装置运行。该盲人拐杖可以通过提示装置引导盲人安全通过马路,从而提高