
一种电力管道巡检机器人.pdf

Ch****91


1/6

2/6

3/6

4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电力管道巡检机器人.pdf
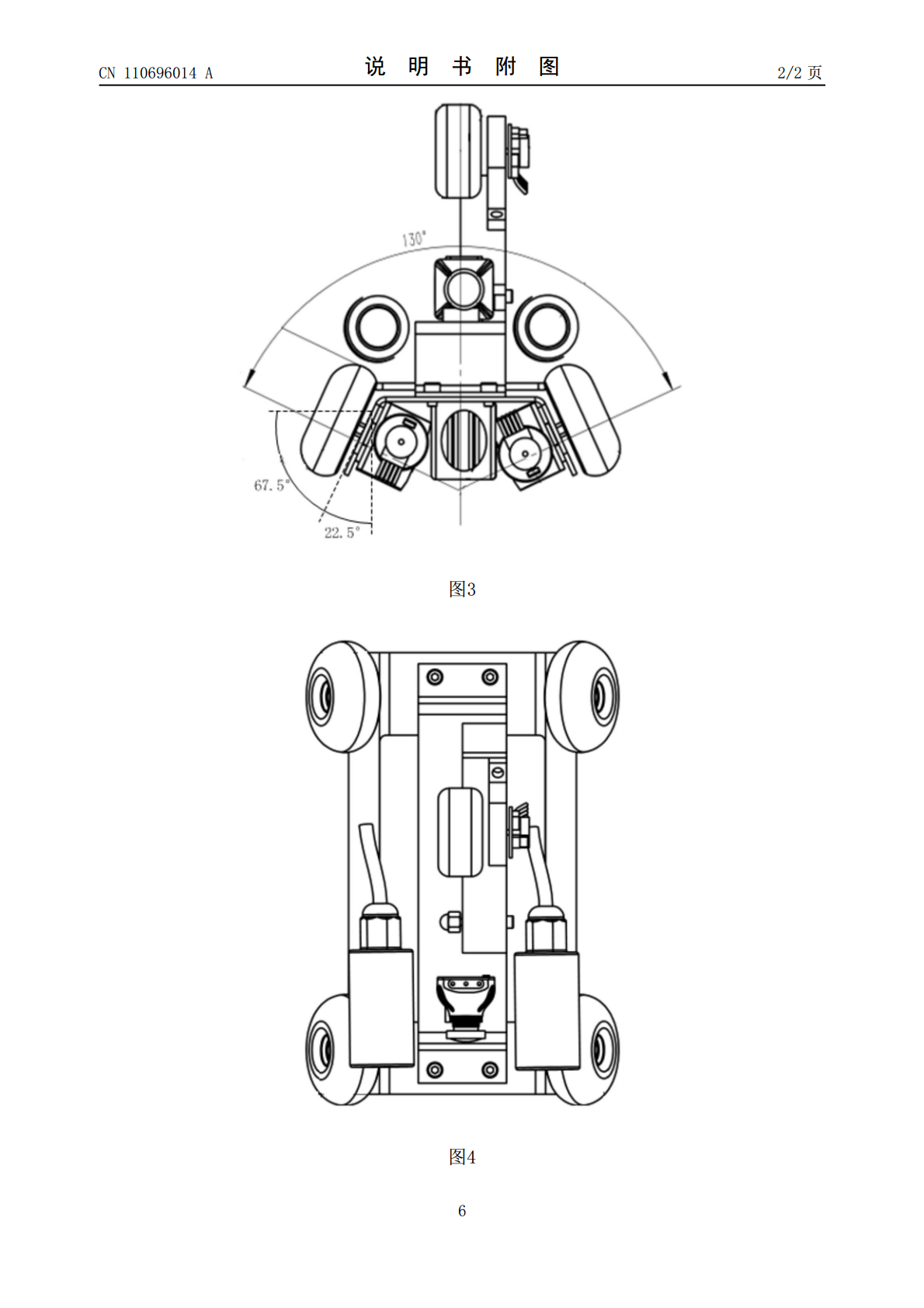
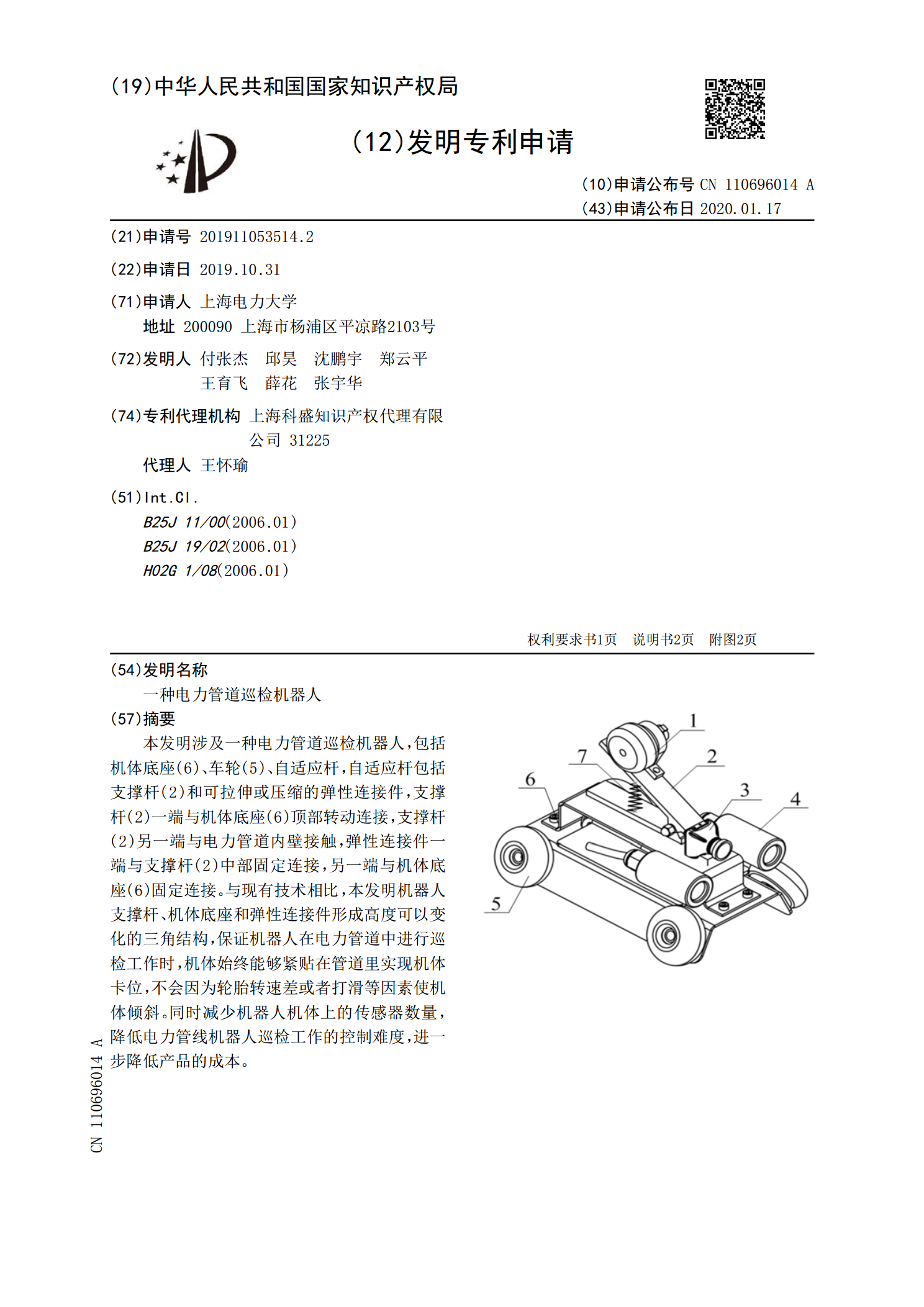
本发明涉及一种电力管道巡检机器人,包括机体底座(6)、车轮(5)、自适应杆,自适应杆包括支撑杆(2)和可拉伸或压缩的弹性连接件,支撑杆(2)一端与机体底座(6)顶部转动连接,支撑杆(2)另一端与电力管道内壁接触,弹性连接件一端与支撑杆(2)中部固定连接,另一端与机体底座(6)固定连接。与现有技术相比,本发明机器人支撑杆、机体底座和弹性连接件形成高度可以变化的三角结构,保证机器人在电力管道中进行巡检工作时,机体始终能够紧贴在管道里实现机体卡位,不会因为轮胎转速差或者打滑等因素使机体倾斜。同时减少机器人机体上
一种电力管道巡检装置.pdf
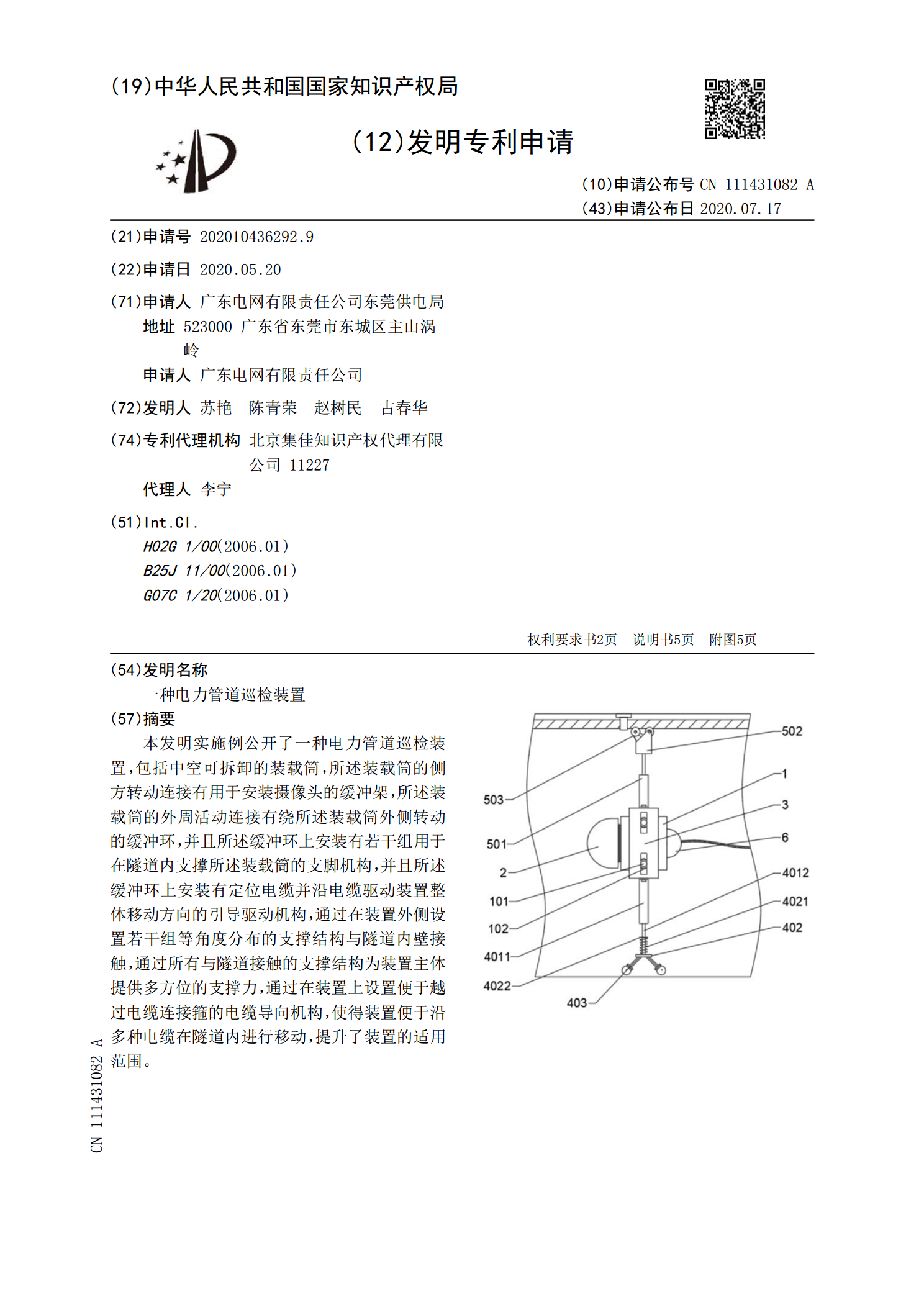
本发明实施例公开了一种电力管道巡检装置,包括中空可拆卸的装载筒,所述装载筒的侧方转动连接有用于安装摄像头的缓冲架,所述装载筒的外周活动连接有绕所述装载筒外侧转动的缓冲环,并且所述缓冲环上安装有若干组用于在隧道内支撑所述装载筒的支脚机构,并且所述缓冲环上安装有定位电缆并沿电缆驱动装置整体移动方向的引导驱动机构,通过在装置外侧设置若干组等角度分布的支撑结构与隧道内壁接触,通过所有与隧道接触的支撑结构为装置主体提供多方位的支撑力,通过在装置上设置便于越过电缆连接箍的电缆导向机构,使得装置便于沿多种电缆在隧道内进

一种电力管道巡检装置.pdf
本公开公开了一种电力管道巡检装置,包括依次连接的第一基体、第三基体和第二基体,所述第一基体与第二基体平行设置;所述第一基体的两侧对称安装有一对第一伸缩杆,所述两个第一伸缩杆远离第一基体的一端均安装有第一行走轮和第一驱动机构,所述第一行走轮在第一驱动机构驱动下自转。本公开实现了以电力管道中电缆为轨道,无需额外铺设专用轨道,通过自动收卷的通信线进行实时传输管道监控信息数据,提高了电力管道巡检的普及度和时效性。
一种海底管道巡检机器人巡检架.pdf
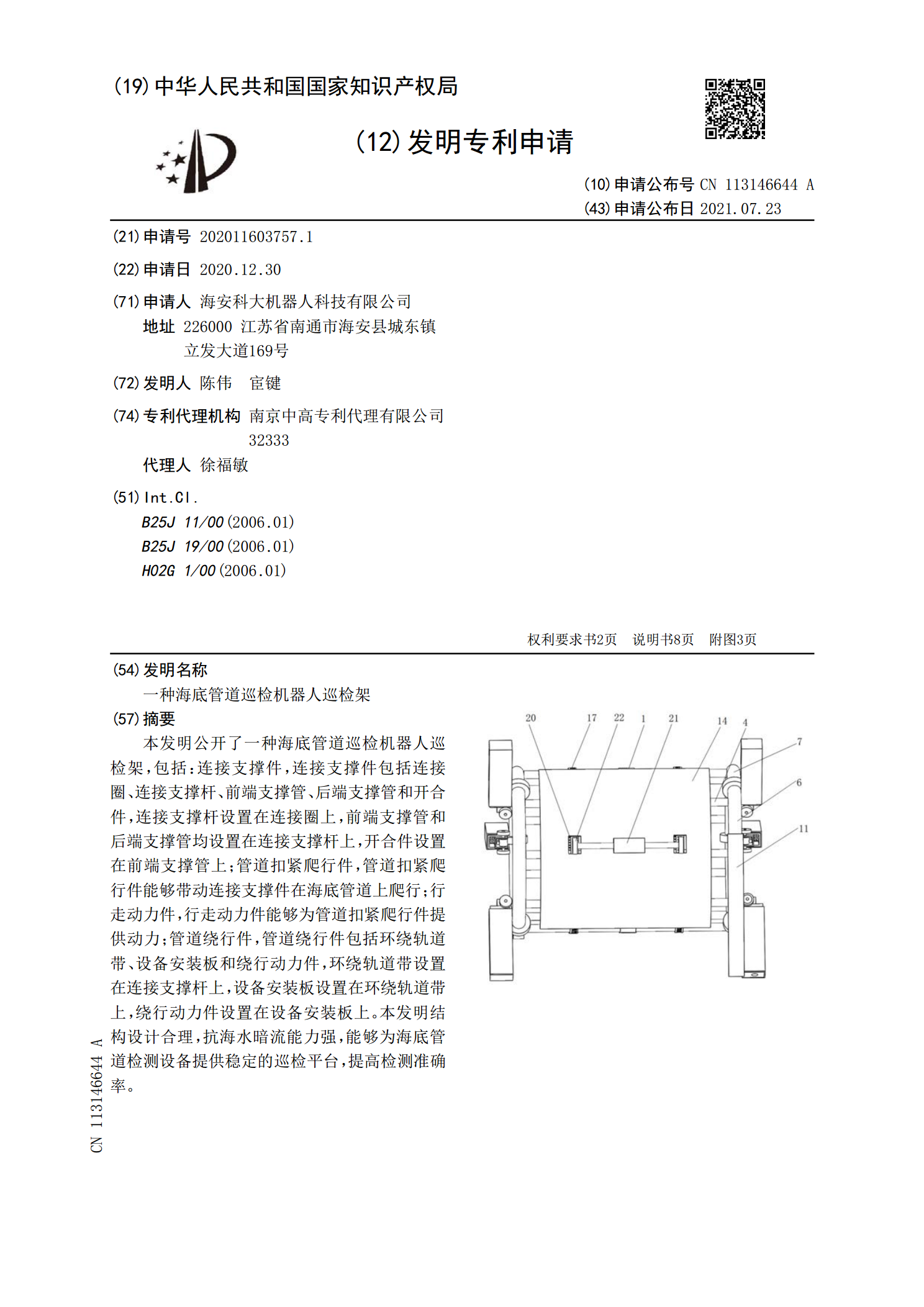
本发明公开了一种海底管道巡检机器人巡检架,包括:连接支撑件,连接支撑件包括连接圈、连接支撑杆、前端支撑管、后端支撑管和开合件,连接支撑杆设置在连接圈上,前端支撑管和后端支撑管均设置在连接支撑杆上,开合件设置在前端支撑管上;管道扣紧爬行件,管道扣紧爬行件能够带动连接支撑件在海底管道上爬行;行走动力件,行走动力件能够为管道扣紧爬行件提供动力;管道绕行件,管道绕行件包括环绕轨道带、设备安装板和绕行动力件,环绕轨道带设置在连接支撑杆上,设备安装板设置在环绕轨道带上,绕行动力件设置在设备安装板上。本发明结构设计合理
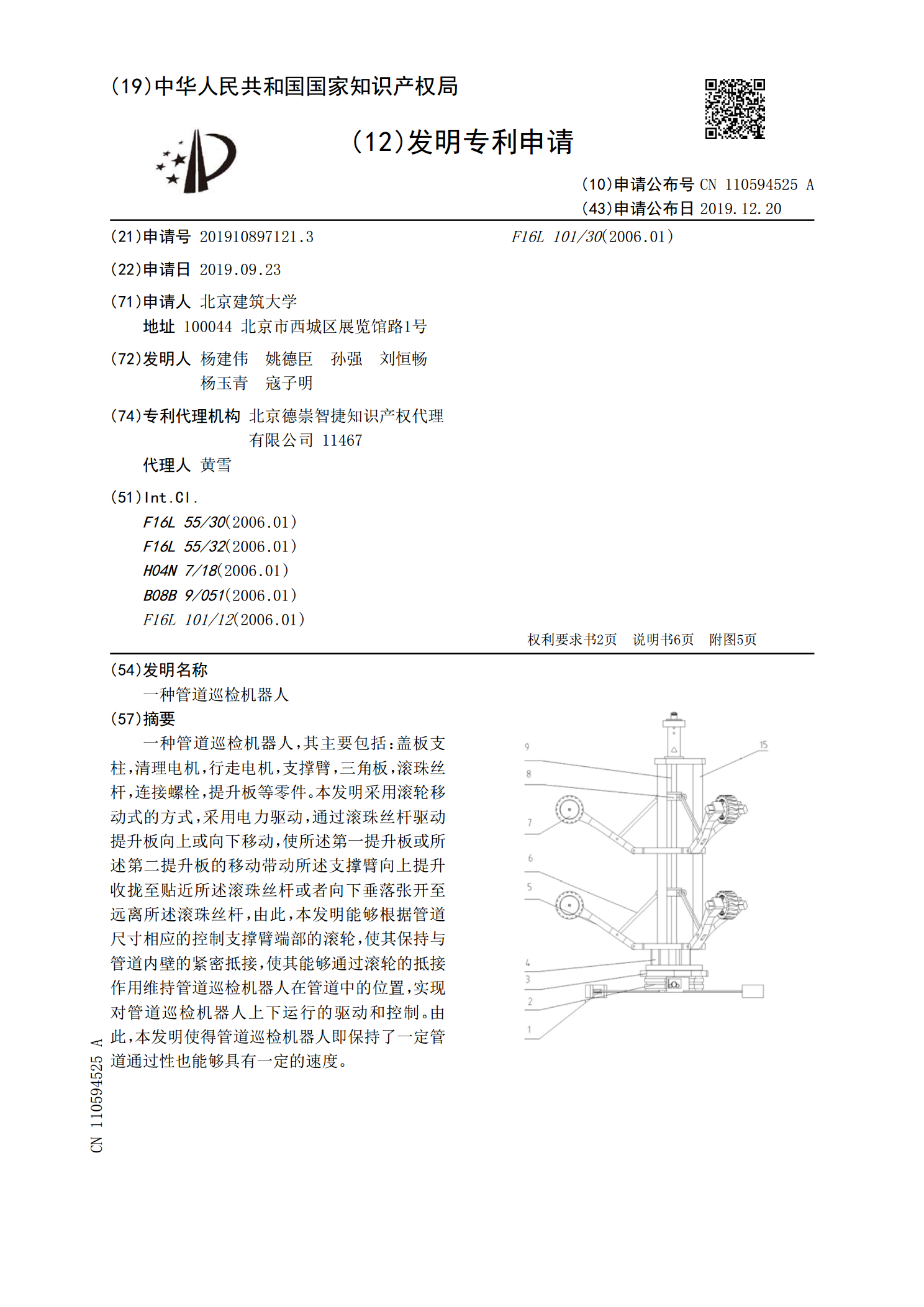
一种管道巡检机器人.pdf
一种管道巡检机器人,其主要包括:盖板支柱,清理电机,行走电机,支撑臂,三角板,滚珠丝杆,连接螺栓,提升板等零件。本发明采用滚轮移动式的方式,采用电力驱动,通过滚珠丝杆驱动提升板向上或向下移动,使所述第一提升板或所述第二提升板的移动带动所述支撑臂向上提升收拢至贴近所述滚珠丝杆或者向下垂落张开至远离所述滚珠丝杆,由此,本发明能够根据管道尺寸相应的控制支撑臂端部的滚轮,使其保持与管道内壁的紧密抵接,使其能够通过滚轮的抵接作用维持管道巡检机器人在管道中的位置,实现对管道巡检机器人上下运行的驱动和控制。由此,本发明