
咽颌运动模式欠驱动柔性胸鳍仿生装置.pdf

书生****ma


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
咽颌运动模式欠驱动柔性胸鳍仿生装置.pdf
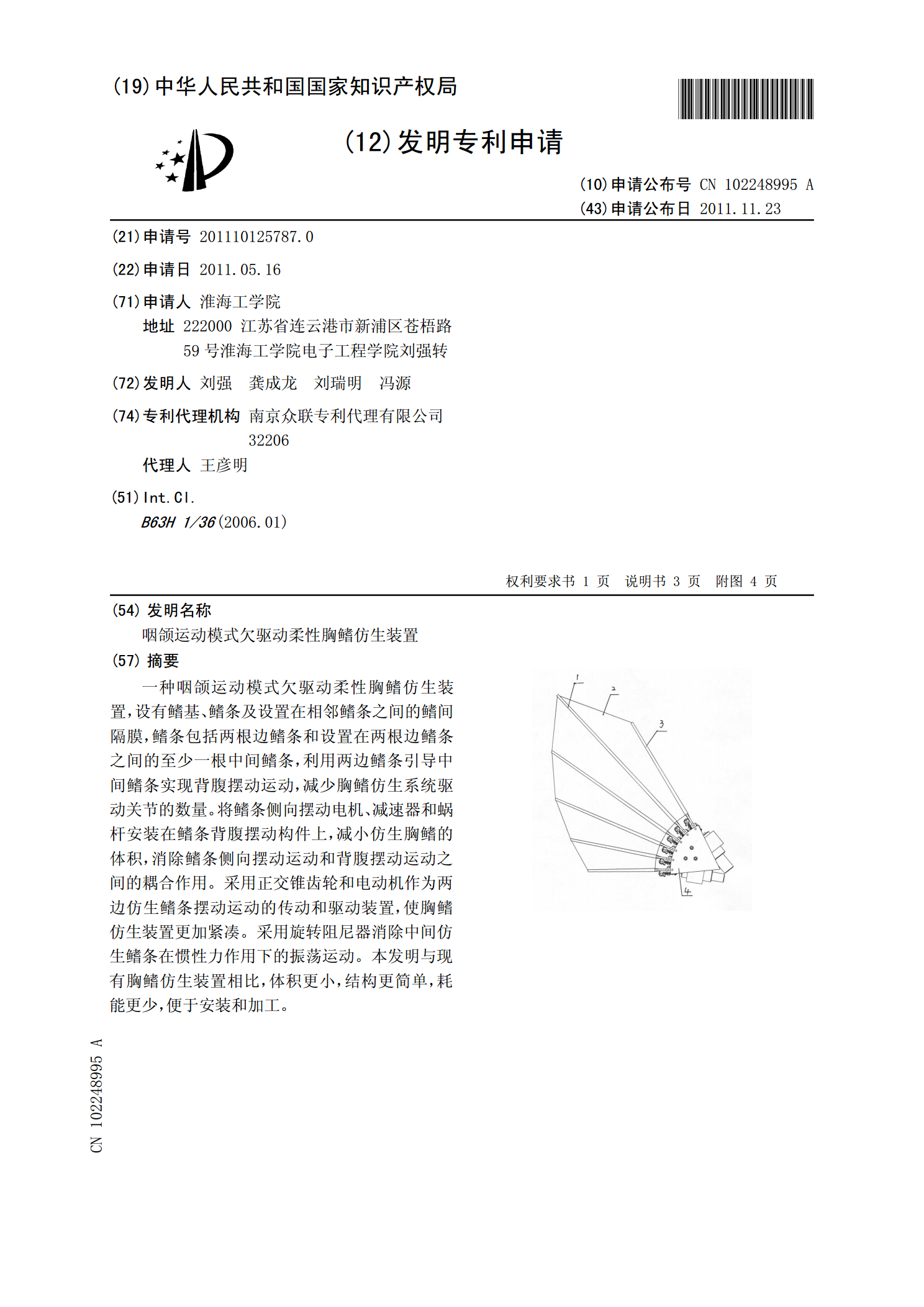
一种咽颌运动模式欠驱动柔性胸鳍仿生装置,设有鳍基、鳍条及设置在相邻鳍条之间的鳍间隔膜,鳍条包括两根边鳍条和设置在两根边鳍条之间的至少一根中间鳍条,利用两边鳍条引导中间鳍条实现背腹摆动运动,减少胸鳍仿生系统驱动关节的数量。将鳍条侧向摆动电机、减速器和蜗杆安装在鳍条背腹摆动构件上,减小仿生胸鳍的体积,消除鳍条侧向摆动运动和背腹摆动运动之间的耦合作用。采用正交锥齿轮和电动机作为两边仿生鳍条摆动运动的传动和驱动装置,使胸鳍仿生装置更加紧凑。采用旋转阻尼器消除中间仿生鳍条在惯性力作用下的振荡运动。本发明与现有胸鳍仿
一种欠驱动仿生手腕装置.pdf
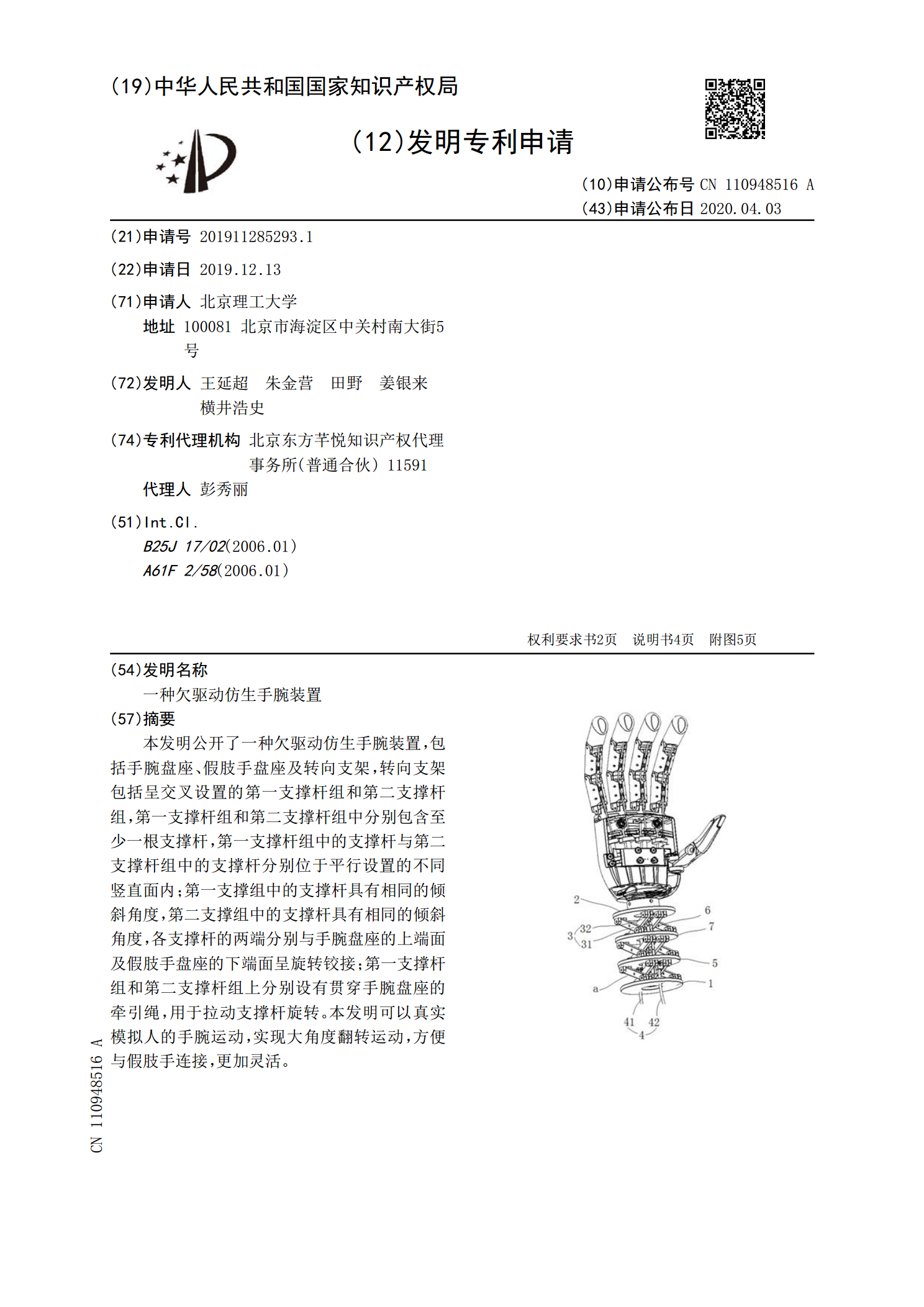
本发明公开了一种欠驱动仿生手腕装置,包括手腕盘座、假肢手盘座及转向支架,转向支架包括呈交叉设置的第一支撑杆组和第二支撑杆组,第一支撑杆组和第二支撑杆组中分别包含至少一根支撑杆,第一支撑杆组中的支撑杆与第二支撑杆组中的支撑杆分别位于平行设置的不同竖直面内;第一支撑组中的支撑杆具有相同的倾斜角度,第二支撑组中的支撑杆具有相同的倾斜角度,各支撑杆的两端分别与手腕盘座的上端面及假肢手盘座的下端面呈旋转铰接;第一支撑杆组和第二支撑杆组上分别设有贯穿手腕盘座的牵引绳,用于拉动支撑杆旋转。本发明可以真实模拟人的手腕运动

柔性件齿条式并联耦合欠驱动手指装置.pdf
柔性件齿条式并联耦合欠驱动手指装置,属于拟人机器人手技术领域。该装置包括基座、近关节轴、第一指段、远关节轴、第二指段、齿轮、齿条、柔性件和簧件。该装置实现了耦合转动与欠驱动转动紧密结合的传动效果,能耦合拟人化抓取,且具备欠驱动自适应功能。整个手指结构简洁,制造加工成本低;将耦合传动与欠驱动传动有机融合起来,利用滑块活接触方式实现自然解耦,此解耦不消耗电机功率,能量利用率高。该装置外形与人手指相似,可以作为机器人手的一个手指或手指的一部分,也可以用多个手指组合成为机器人手,用以达到拟人机器人手高关节自由度、

颌架式仿生运动机构疲劳测试装置.pdf
本发明的目的在于提供颌架式仿生运动机构疲劳测试装置,包括颌架式仿生运动机构、电机、减速器、槽凸轮机构和底座,颌架式仿生运动机构、电机、减速器和槽凸轮机构均安装在底座上,减速器分别连接电机和槽凸轮机构,颌架式仿生运动机构和槽凸轮机构相连。本发明结构简单、实用、携带方便、控制智能、测试精准,能够根据颊侧多曲簧活动的各种张开要求精确调节尺寸,并能够精确测量多曲弹簧的疲劳周期并能够在多曲弹簧断裂时及时制动,能有效的应用在多曲弹簧的疲劳性能测试。
一种胸鳍柔性变刚度的仿生弹涂鱼及其控制方法.pdf
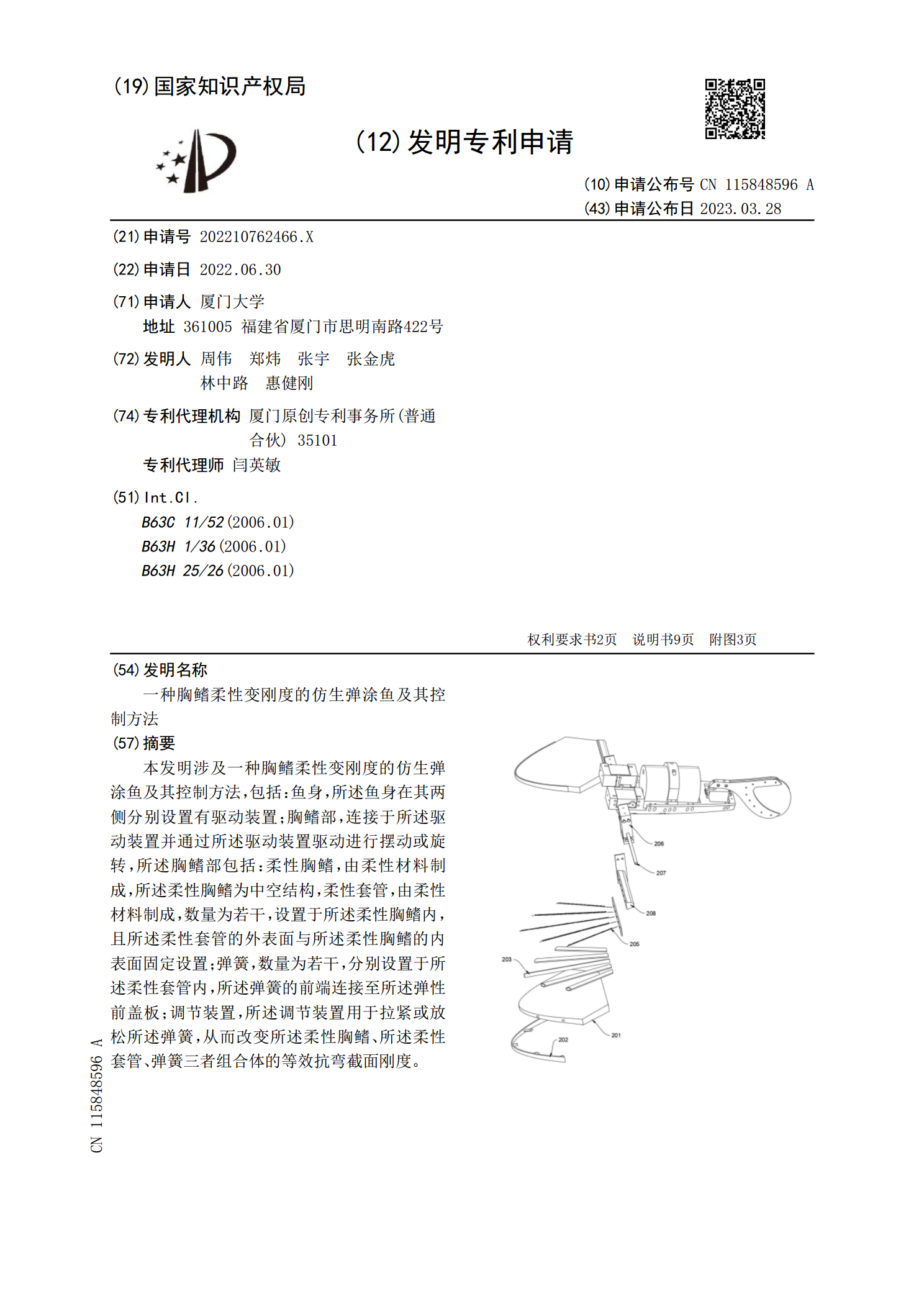
本发明涉及一种胸鳍柔性变刚度的仿生弹涂鱼及其控制方法,包括:鱼身,所述鱼身在其两侧分别设置有驱动装置;胸鳍部,连接于所述驱动装置并通过所述驱动装置驱动进行摆动或旋转,所述胸鳍部包括:柔性胸鳍,由柔性材料制成,所述柔性胸鳍为中空结构,柔性套管,由柔性材料制成,数量为若干,设置于所述柔性胸鳍内,且所述柔性套管的外表面与所述柔性胸鳍的内表面固定设置;弹簧,数量为若干,分别设置于所述柔性套管内,所述弹簧的前端连接至所述弹性前盖板;调节装置,所述调节装置用于拉紧或放松所述弹簧,从而改变所述柔性胸鳍、所述柔性套管、弹