
一种送取料机械手.pdf

邻家****mk

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种送取料机械手.pdf
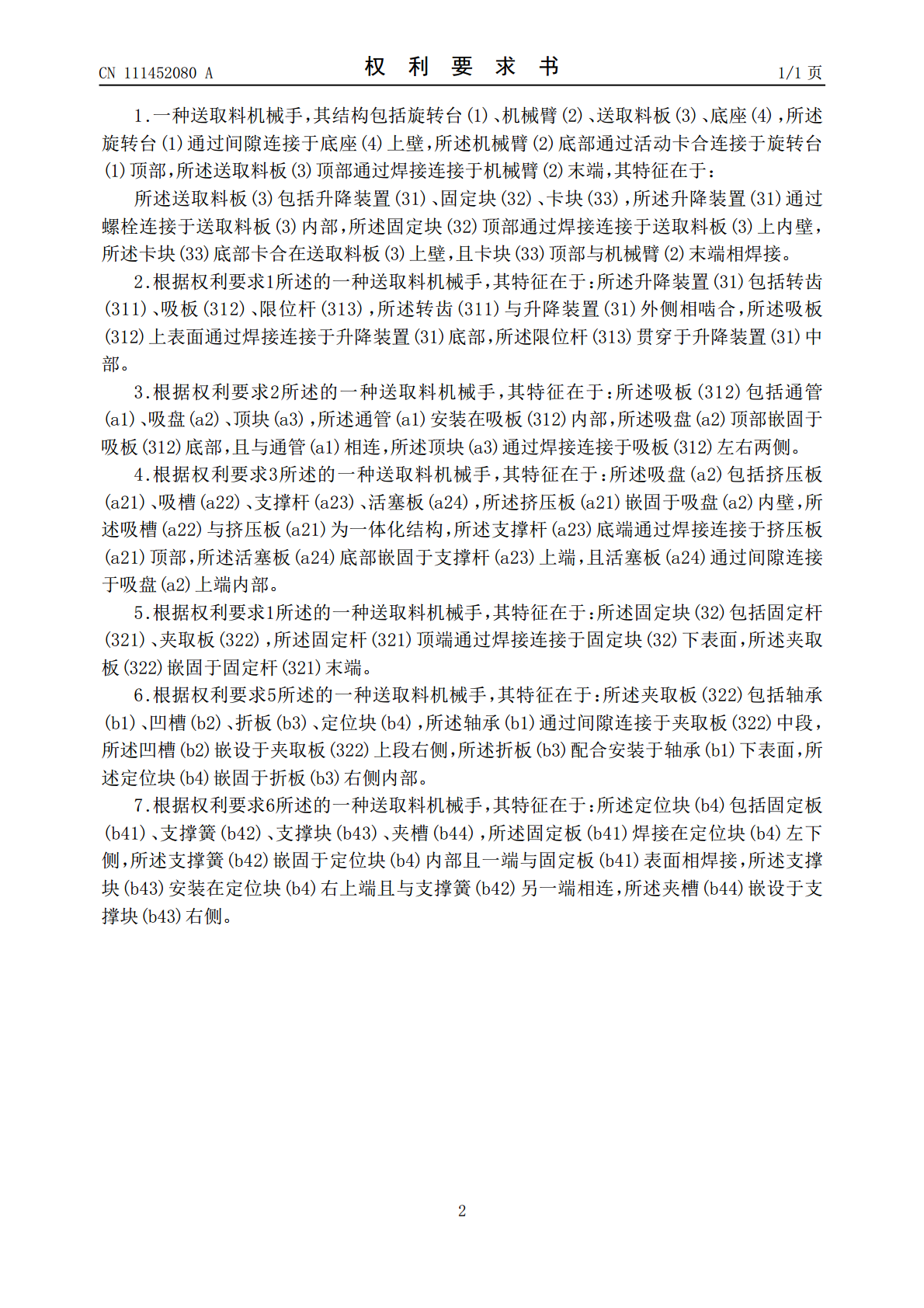
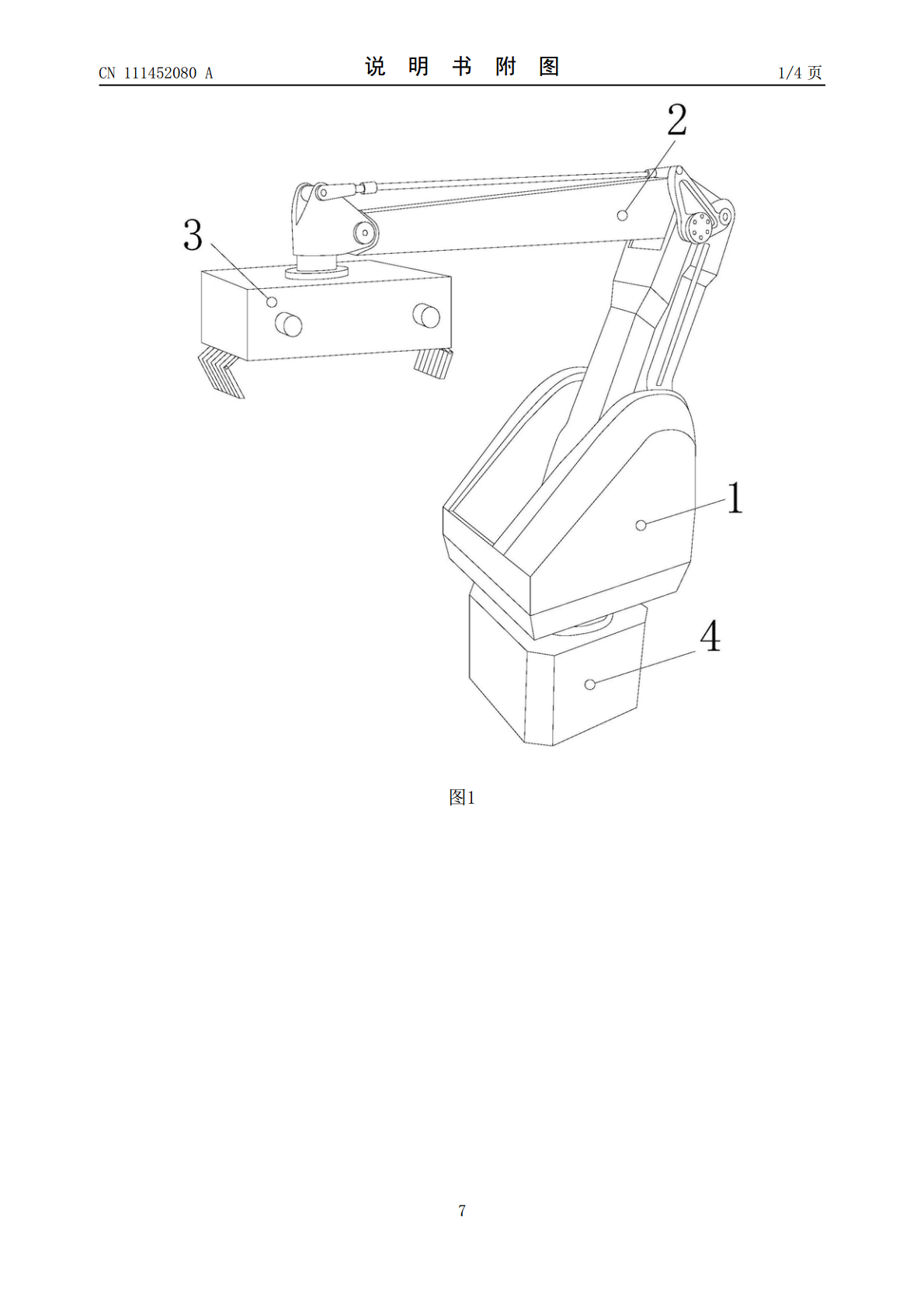
本发明公开了一种送取料机械手,其结构包括旋转台、机械臂、送取料板、底座,所述旋转台通过间隙连接于底座上壁,所述机械臂底部通过活动卡合连接于旋转台顶部,所述送取料板顶部通过焊接连接于机械臂末端,当需要对玻璃镜片这种易碎的产品进行送取料时,转齿转动使得升降装置带动吸板下降至产品表面,此时吸盘向下挤压使挤压板下压,使吸槽紧贴产品表面对产品进行吸取,同时通过支撑杆带动活塞板下降使吸盘内产生真空,从而提高对产品的吸附力,避免送取料时产品出现掉落现象,当需要对较大的产品进行送取料时,通过转齿的转动使吸板向上收回,使夹
一种取料机械手.pdf
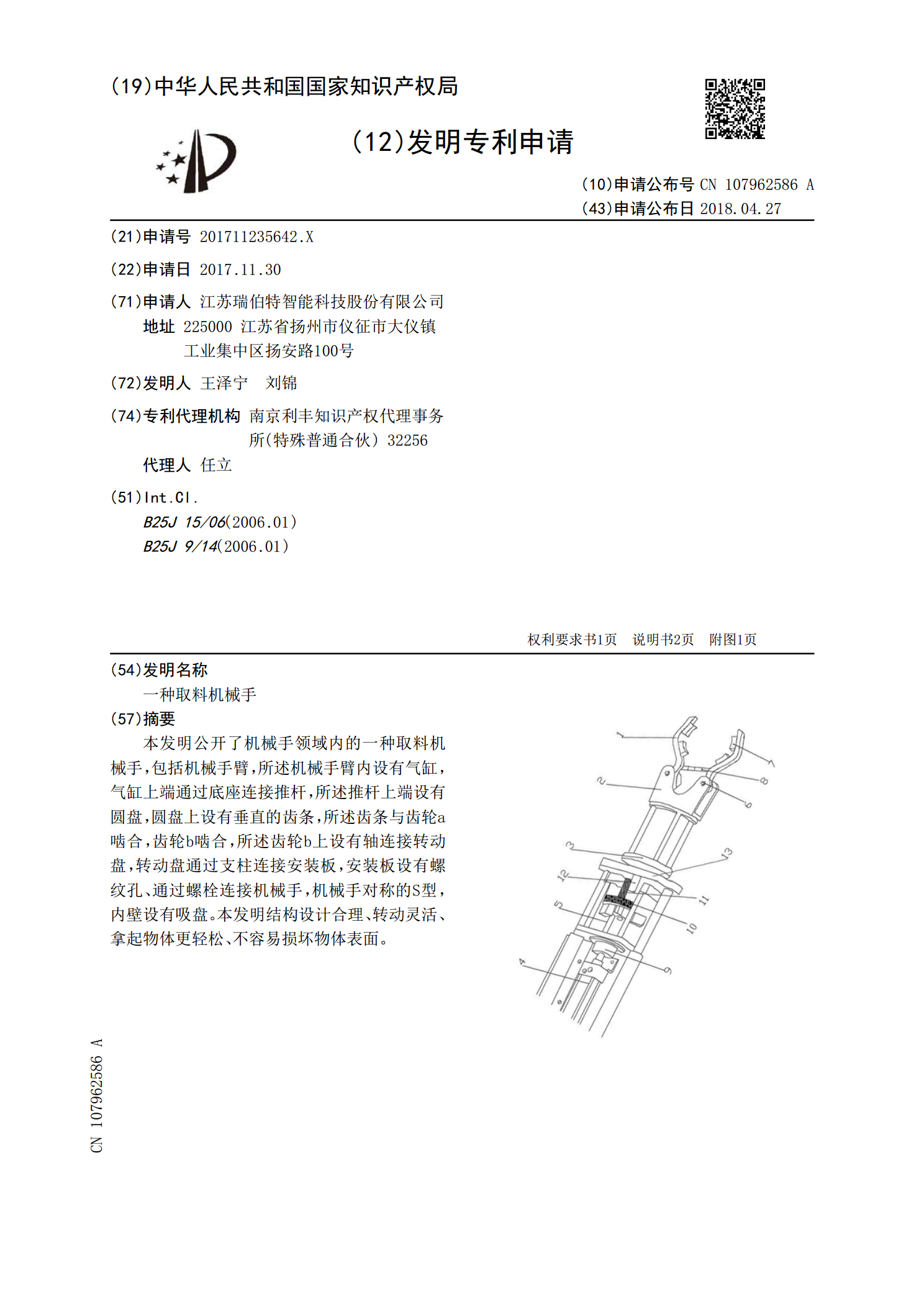
本发明公开了机械手领域内的一种取料机械手,包括机械手臂,所述机械手臂内设有气缸,气缸上端通过底座连接推杆,所述推杆上端设有圆盘,圆盘上设有垂直的齿条,所述齿条与齿轮a啮合,齿轮b啮合,所述齿轮b上设有轴连接转动盘,转动盘通过支柱连接安装板,安装板设有螺纹孔、通过螺栓连接机械手,机械手对称的S型,内壁设有吸盘。本发明结构设计合理、转动灵活、拿起物体更轻松、不容易损坏物体表面。
一种灌胶装置的自动送料取料机械手及其工作方法.pdf
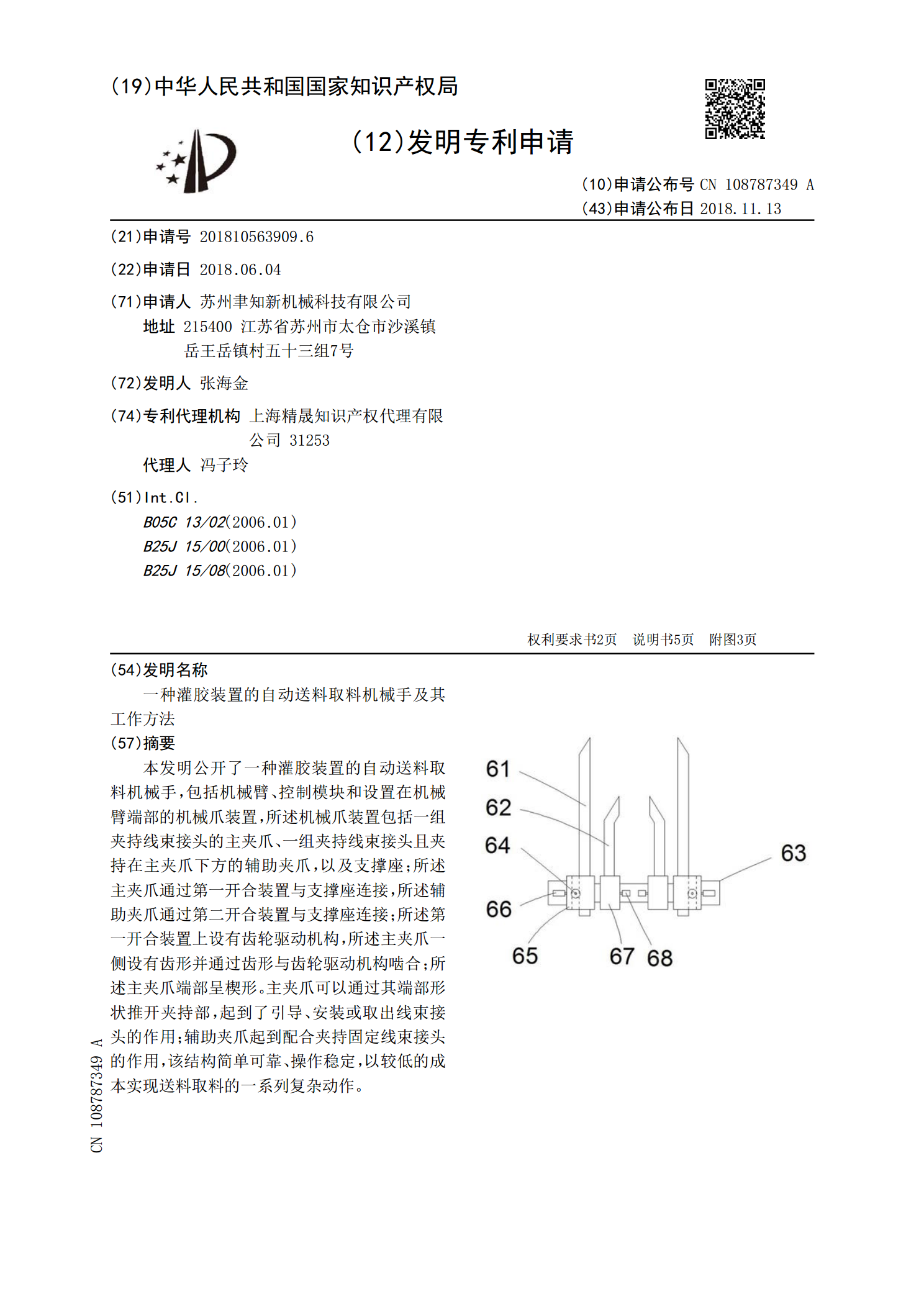
本发明公开了一种灌胶装置的自动送料取料机械手,包括机械臂、控制模块和设置在机械臂端部的机械爪装置,所述机械爪装置包括一组夹持线束接头的主夹爪、一组夹持线束接头且夹持在主夹爪下方的辅助夹爪,以及支撑座;所述主夹爪通过第一开合装置与支撑座连接,所述辅助夹爪通过第二开合装置与支撑座连接;所述第一开合装置上设有齿轮驱动机构,所述主夹爪一侧设有齿形并通过齿形与齿轮驱动机构啮合;所述主夹爪端部呈楔形。主夹爪可以通过其端部形状推开夹持部,起到了引导、安装或取出线束接头的作用;辅助夹爪起到配合夹持固定线束接头的作用,该结
一种取放料机械手.pdf
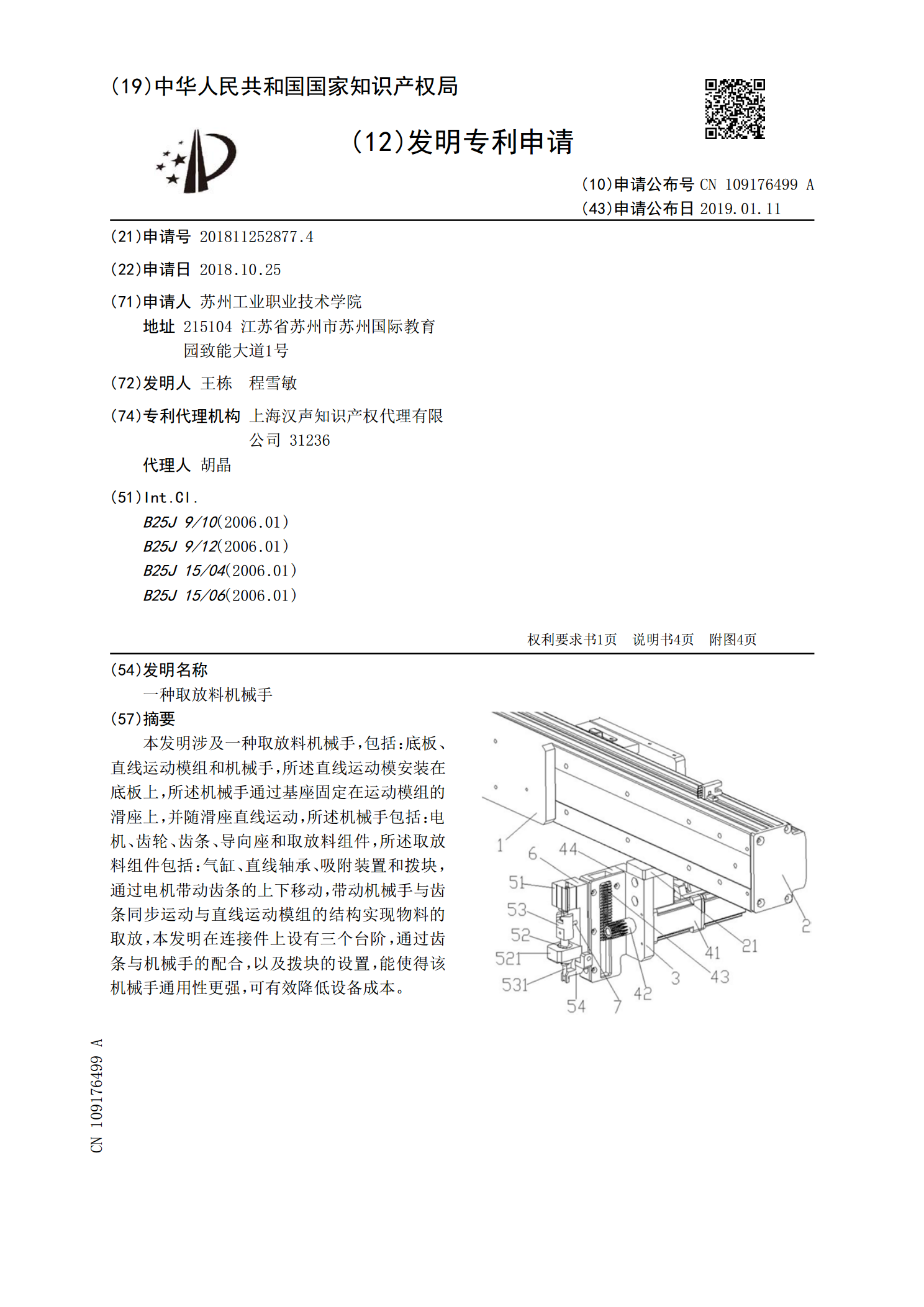
本发明涉及一种取放料机械手,包括:底板、直线运动模组和机械手,所述直线运动模安装在底板上,所述机械手通过基座固定在运动模组的滑座上,并随滑座直线运动,所述机械手包括:电机、齿轮、齿条、导向座和取放料组件,所述取放料组件包括:气缸、直线轴承、吸附装置和拨块,通过电机带动齿条的上下移动,带动机械手与齿条同步运动与直线运动模组的结构实现物料的取放,本发明在连接件上设有三个台阶,通过齿条与机械手的配合,以及拨块的设置,能使得该机械手通用性更强,可有效降低设备成本。
一种旋转取料机械手.pdf
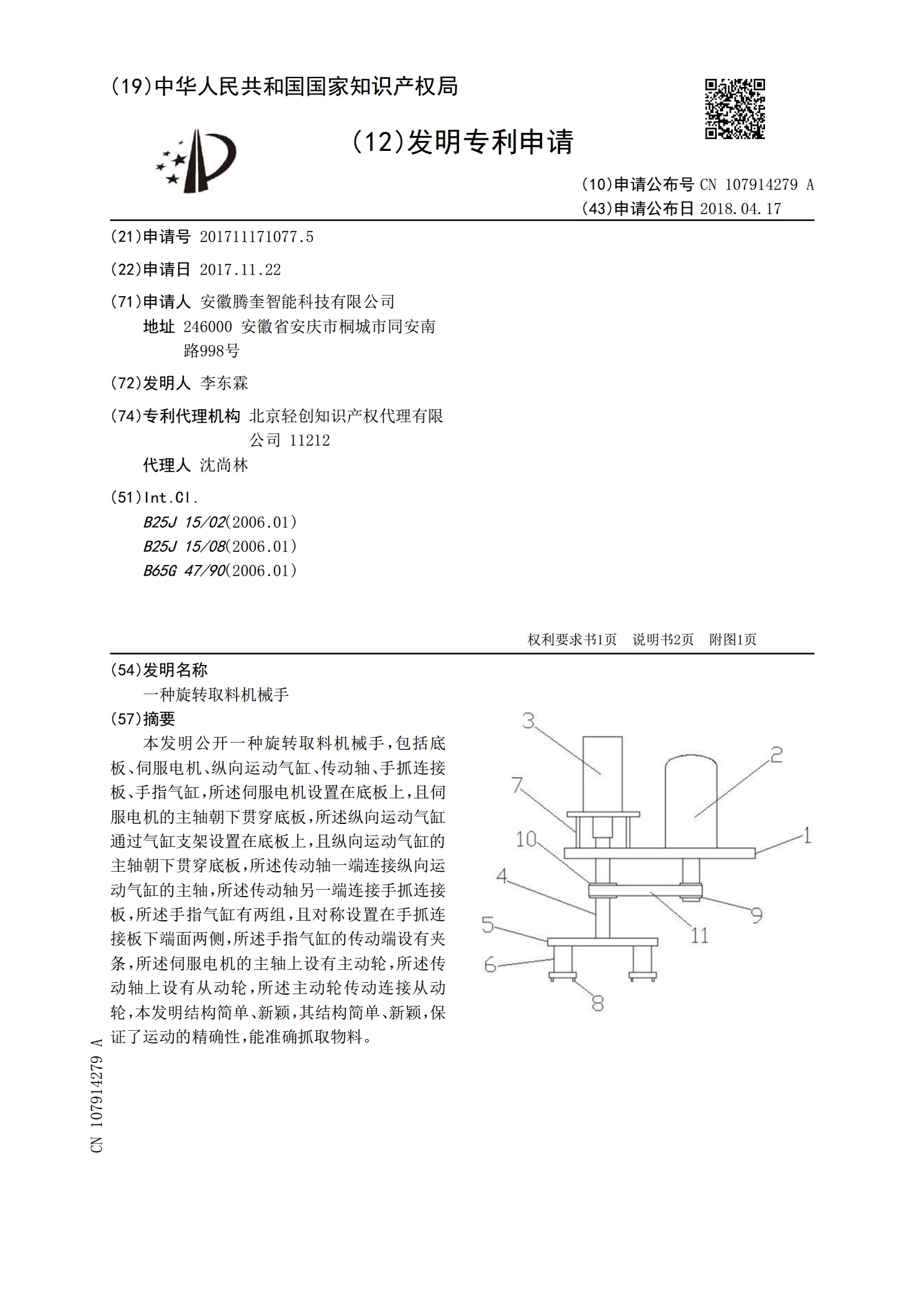
本发明公开一种旋转取料机械手,包括底板、伺服电机、纵向运动气缸、传动轴、手抓连接板、手指气缸,所述伺服电机设置在底板上,且伺服电机的主轴朝下贯穿底板,所述纵向运动气缸通过气缸支架设置在底板上,且纵向运动气缸的主轴朝下贯穿底板,所述传动轴一端连接纵向运动气缸的主轴,所述传动轴另一端连接手抓连接板,所述手指气缸有两组,且对称设置在手抓连接板下端面两侧,所述手指气缸的传动端设有夹条,所述伺服电机的主轴上设有主动轮,所述传动轴上设有从动轮,所述主动轮传动连接从动轮,本发明结构简单、新颖,其结构简单、新颖,保证了运