
人工智能导盲行走机器人.pdf

Ro****44


1/10
2/10
3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

人工智能导盲行走机器人.pdf
本发明涉及机器人技术领域,公开了人工智能导盲行走机器人,包括升降支撑杆以及设置在升降支撑杆上的驱动装置、跟踪装置、探测装置、互动装置和控制器;驱动装置包括电动万向轮和电动升缩杆;跟踪装置包括摄像模块、温度检测模块、人脸检测模块、特征提取模块、身份信息库和识别模块;探测装置包括避障模块、震动模块、导航模块和语音提醒模块;互动装置包括获取机构和反馈机构,获取机构包括获取模块、比较模块和唤醒模块,反馈机构包括括分析模块、查询模块、存储模块、反馈模块和求助模块。采用本发明具有能够实现实时跟踪和探测及导航路径,还能

盲道行走机器人.pdf
本发明公开了一种盲道行走机器人,包含盲道导向系统,机器人行走系统,机器人感知系统,机器人通讯系统,机器人执行系统。盲道导向系统通过感知机器人下面的盲道信息处理成机器人可以执行的导向信息,为机器人的行走路线提供依据。

导盲机器人.pdf
本发明提供了一种导盲机器人,本发明提供的导盲机器人中,设置有行走驱动装置以及速度传感器;行走驱动装置能够根据速度传感器检测到的盲人的行走速度控制导盲机器人的行走速度,使导盲机器人的行走速度与盲人的行走速度匹配。从而本发明提供的导盲机器人能够很好的适应盲人的行走速度。
一种导盲机器人及导盲系统、导盲方法.pdf
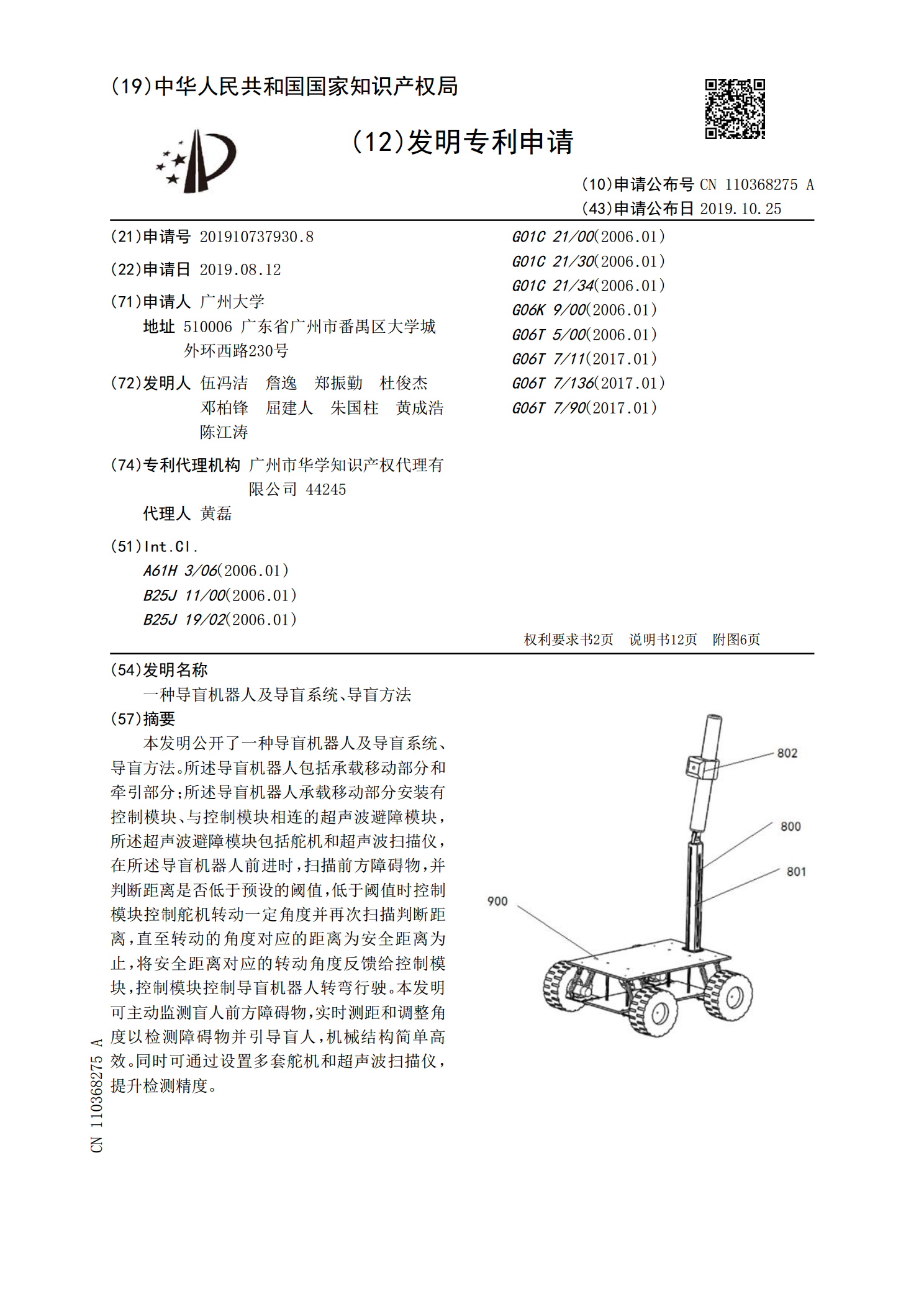
本发明公开了一种导盲机器人及导盲系统、导盲方法。所述导盲机器人包括承载移动部分和牵引部分;所述导盲机器人承载移动部分安装有控制模块、与控制模块相连的超声波避障模块,所述超声波避障模块包括舵机和超声波扫描仪,在所述导盲机器人前进时,扫描前方障碍物,并判断距离是否低于预设的阈值,低于阈值时控制模块控制舵机转动一定角度并再次扫描判断距离,直至转动的角度对应的距离为安全距离为止,将安全距离对应的转动角度反馈给控制模块,控制模块控制导盲机器人转弯行驶。本发明可主动监测盲人前方障碍物,实时测距和调整角度以检测障碍物并
一种人工智能拐杖行走机器人.pdf
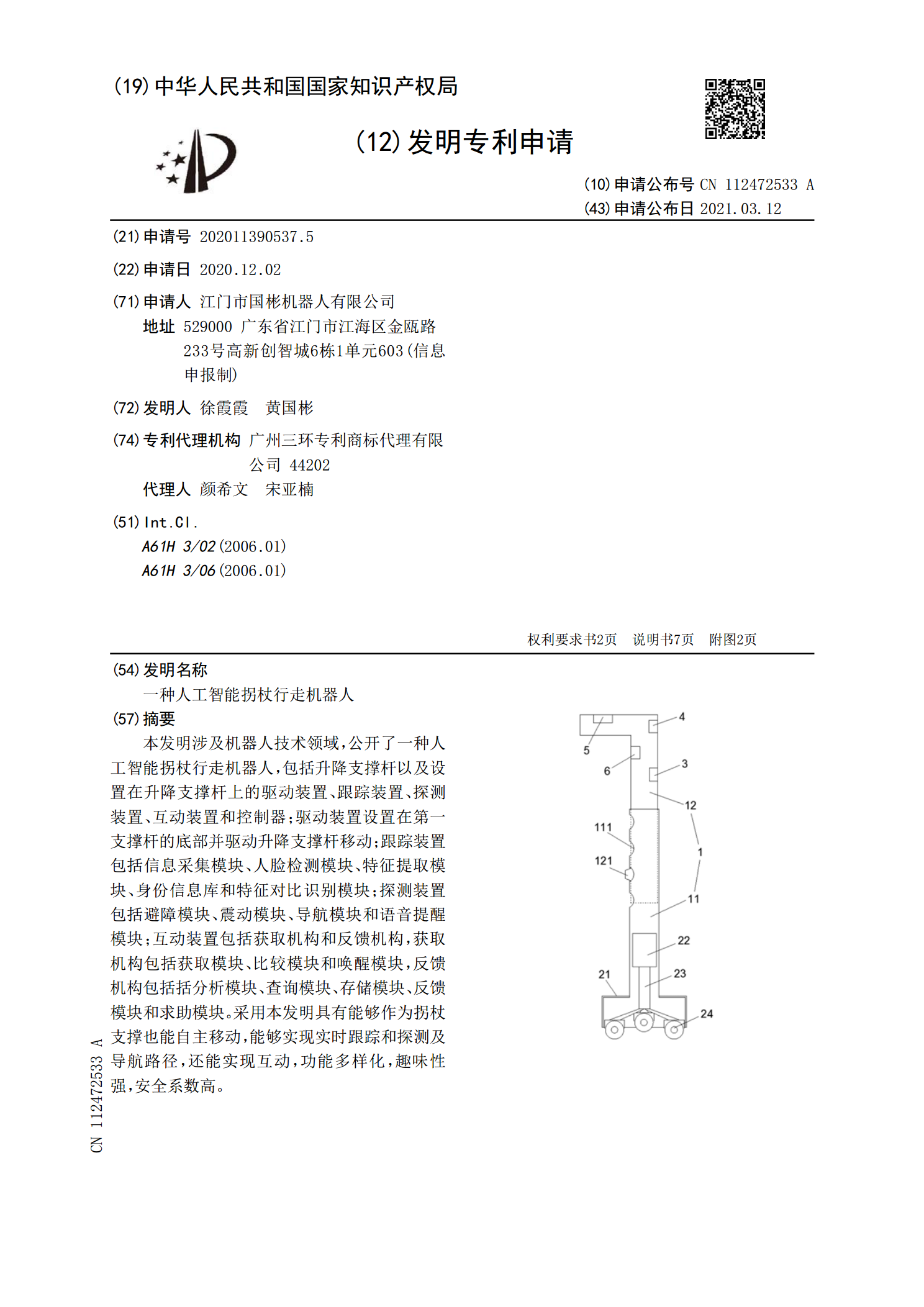
本发明涉及机器人技术领域,公开了一种人工智能拐杖行走机器人,包括升降支撑杆以及设置在升降支撑杆上的驱动装置、跟踪装置、探测装置、互动装置和控制器;驱动装置设置在第一支撑杆的底部并驱动升降支撑杆移动;跟踪装置包括信息采集模块、人脸检测模块、特征提取模块、身份信息库和特征对比识别模块;探测装置包括避障模块、震动模块、导航模块和语音提醒模块;互动装置包括获取机构和反馈机构,获取机构包括获取模块、比较模块和唤醒模块,反馈机构包括括分析模块、查询模块、存储模块、反馈模块和求助模块。采用本发明具有能够作为拐杖支撑也能