
无轨电动车辆.pdf

增梅****主啊

1/7
2/7
3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
无轨电动车辆.pdf
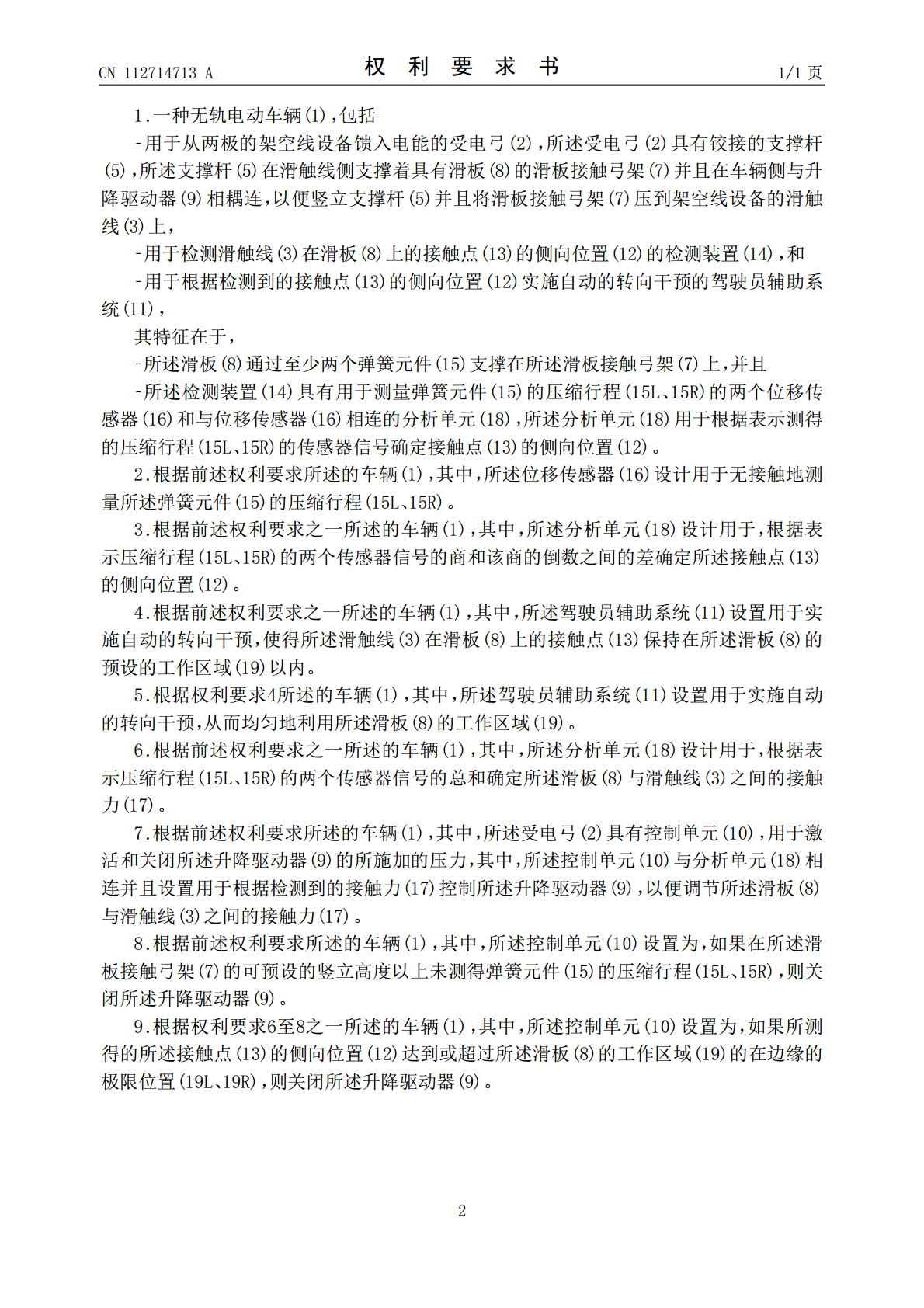
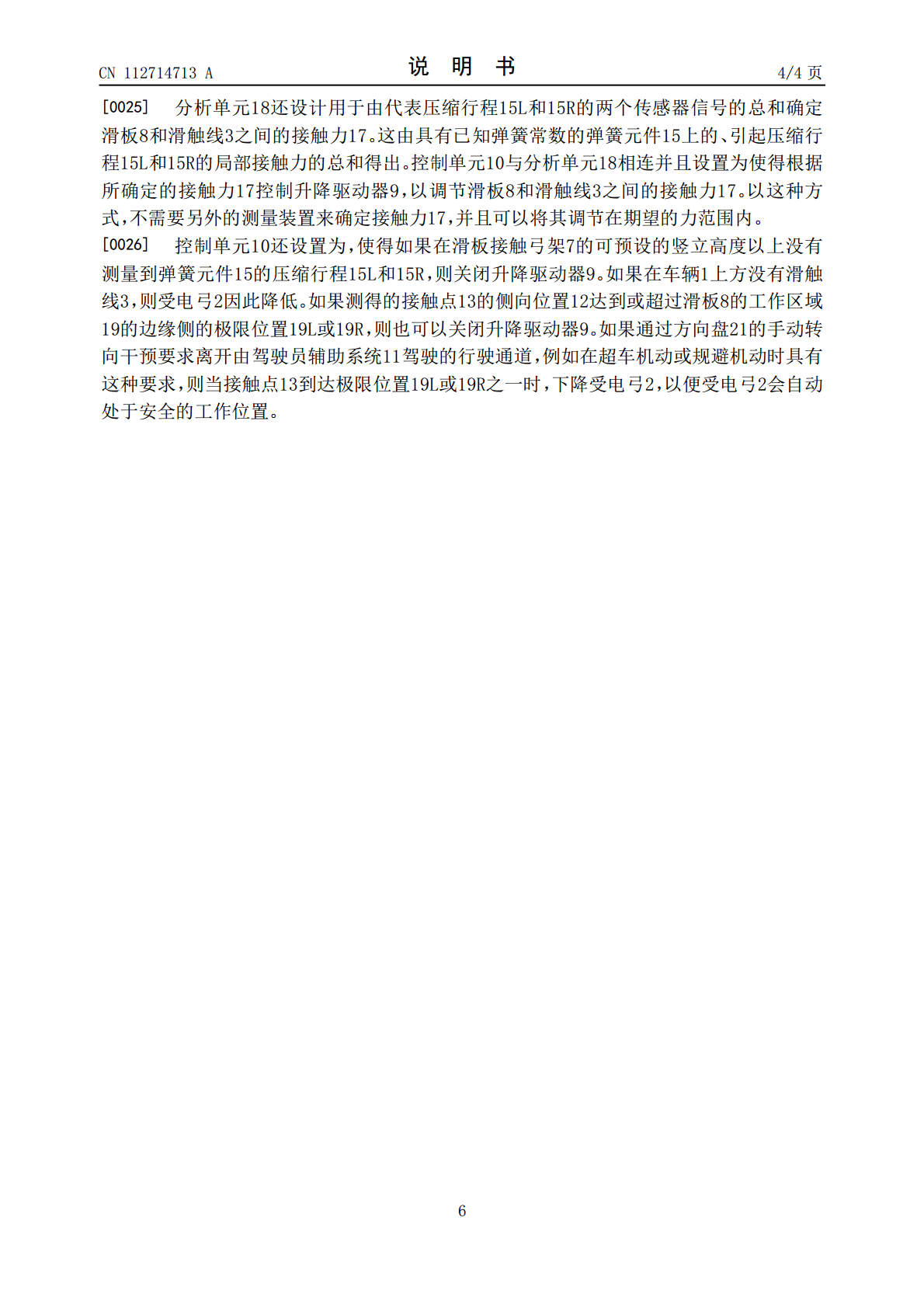
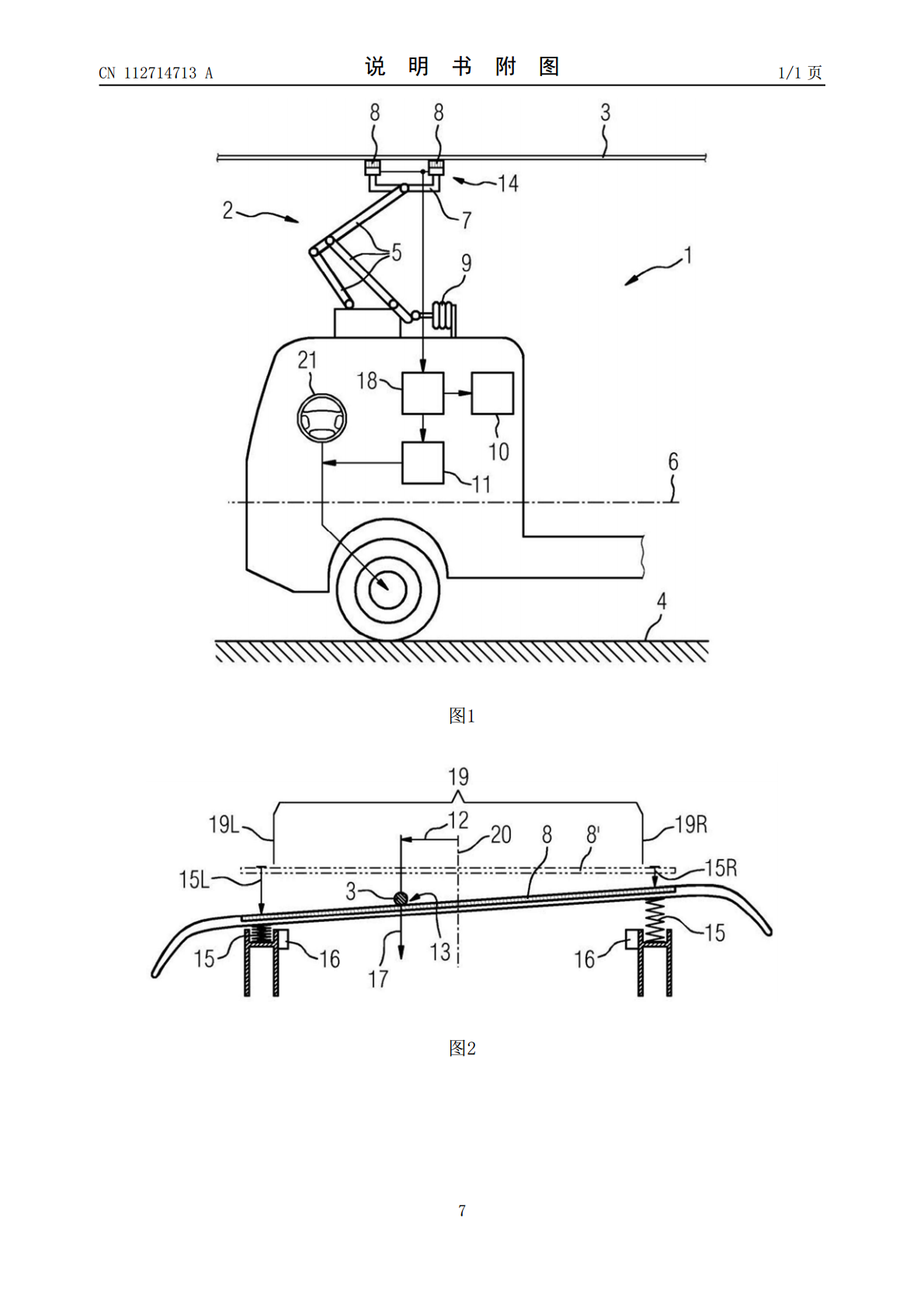
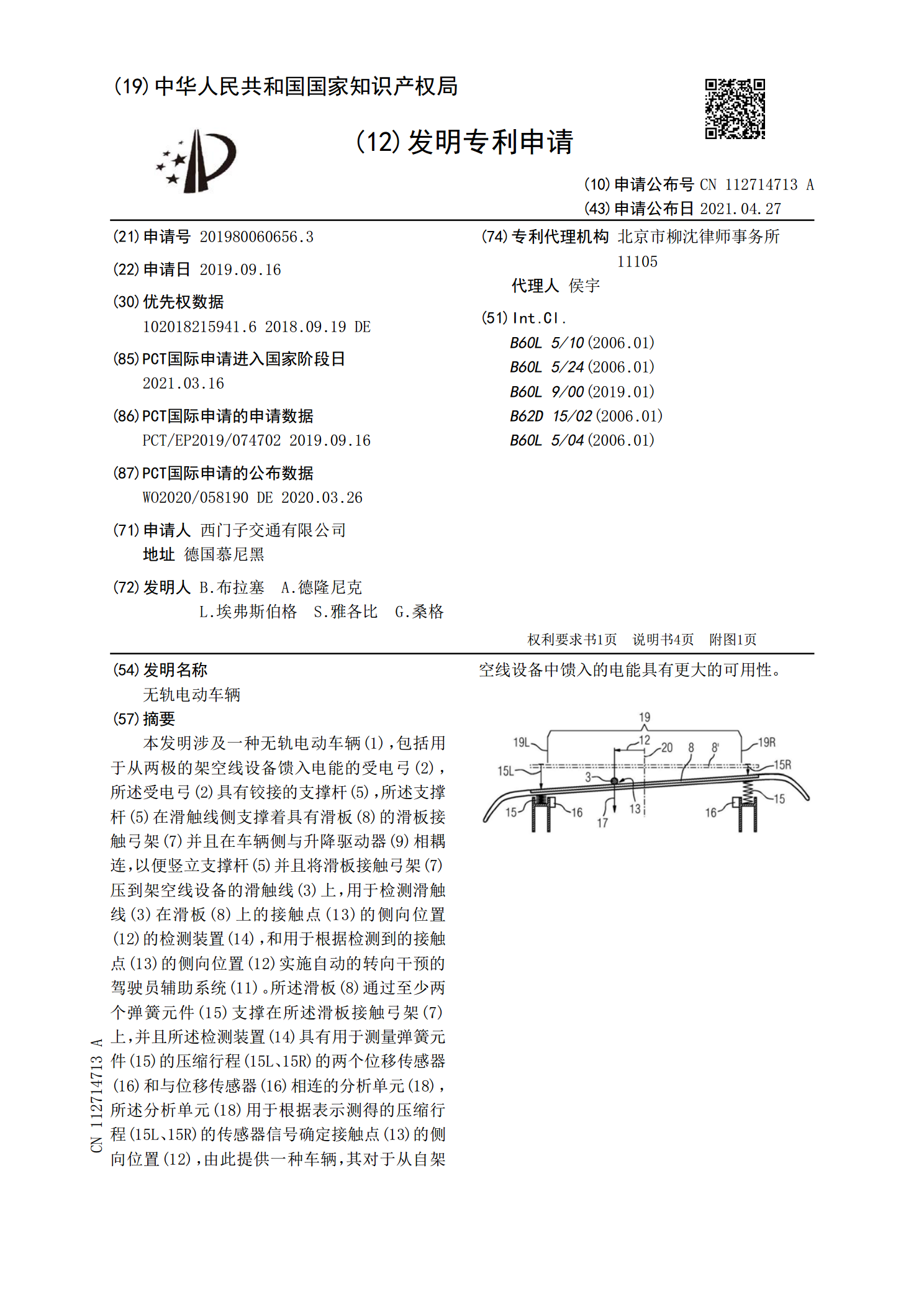
本发明涉及一种无轨电动车辆(1),包括用于从两极的架空线设备馈入电能的受电弓(2),所述受电弓(2)具有铰接的支撑杆(5),所述支撑杆(5)在滑触线侧支撑着具有滑板(8)的滑板接触弓架(7)并且在车辆侧与升降驱动器(9)相耦连,以便竖立支撑杆(5)并且将滑板接触弓架(7)压到架空线设备的滑触线(3)上,用于检测滑触线(3)在滑板(8)上的接触点(13)的侧向位置(12)的检测装置(14),和用于根据检测到的接触点(13)的侧向位置(12)实施自动的转向干预的驾驶员辅助系统(11)。所述滑板(8)通过至少两

双源无轨电动货车.pdf
本发明公开了一种双源无轨电动货车,伸缩升降式受电弓立式设置在双源无轨电动货车驾驶室的后壁附近或者货厢的前厢板附近。该受电弓由横杆5和竖杆6、7的下端连接活塞8、9,构成伸缩升降支撑架,和由与活塞8、9相匹配安装的气缸11、12连接常闭式两位三通电磁阀13及电磁阀13进气口连通储气罐14构成气压驱动的伸缩升降系统、在顶端并列设置导电滑板2、4系统后,立式设置在驾驶室后壁10附近的车架18上。给电磁阀13通电,储气罐14就为气缸11、12加气增压作用于活塞8、9,使导电滑板2、4伸出上升至能从电车触网线1、3

立体无轨电动公交车.pdf
本发明立体无轨电动公交车的设计是以交通与公交互不影响的理念设计的,车体设计为两层,下层保留道路空间,保证小型车辆正常穿行通过,上层为公交乘车室,宽度可以设计成横跨一条或两条车道,动力采用电动车原理使用直流电,车轮可以根据车身长度增设以保证动力,是一个新型绿色公交车。
矿用电动无轨运输车.pdf
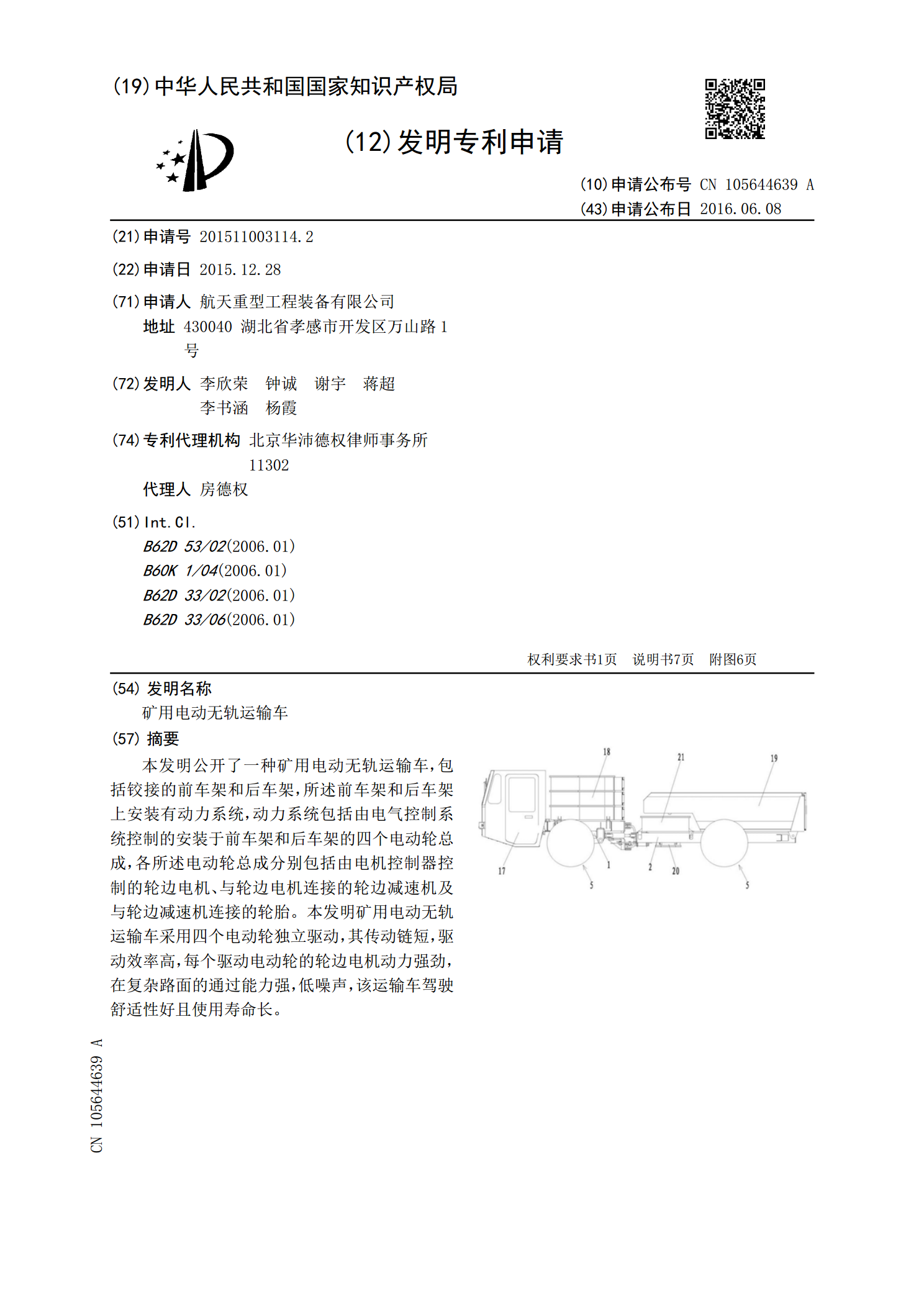
本发明公开了一种矿用电动无轨运输车,包括铰接的前车架和后车架,所述前车架和后车架上安装有动力系统,动力系统包括由电气控制系统控制的安装于前车架和后车架的四个电动轮总成,各所述电动轮总成分别包括由电机控制器控制的轮边电机、与轮边电机连接的轮边减速机及与轮边减速机连接的轮胎。本发明矿用电动无轨运输车采用四个电动轮独立驱动,其传动链短,驱动效率高,每个驱动电动轮的轮边电机动力强劲,在复杂路面的通过能力强,低噪声,该运输车驾驶舒适性好且使用寿命长。

厂内无轨车辆运输安全技术.doc
厂内无轨车辆运输安全技术一、厂内道的安全要求1.厂内道路的平面布置、宽度、路面、坡度等应适应工厂生产、运输、防震、防尘等要求。有利于搬运、装卸机械化和工厂发展的需要。2.道路制定应遵照《工矿道路制定规范》等有关规定进行。3.路面宽度和纵坡应满足表1的要求。道路分类主要道路次要道路辅助道路厂房引道路面宽度〔m〕汽车大型厂7~96~73.5~6与车间大门宽度相适应中型厂6~83.5~6小型厂63最大纵坡〔%〕汽车平原地区68~98~108~11山区8蓄电池搬运车45表1厂内道路的宽度和坡度注:计算车速为:汽车