
一种电动汽车制动感觉和踏板位置主动调节式操纵机构.pdf

小沛****文章

1/10
2/10
3/10
4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电动汽车制动感觉和踏板位置主动调节式操纵机构.pdf
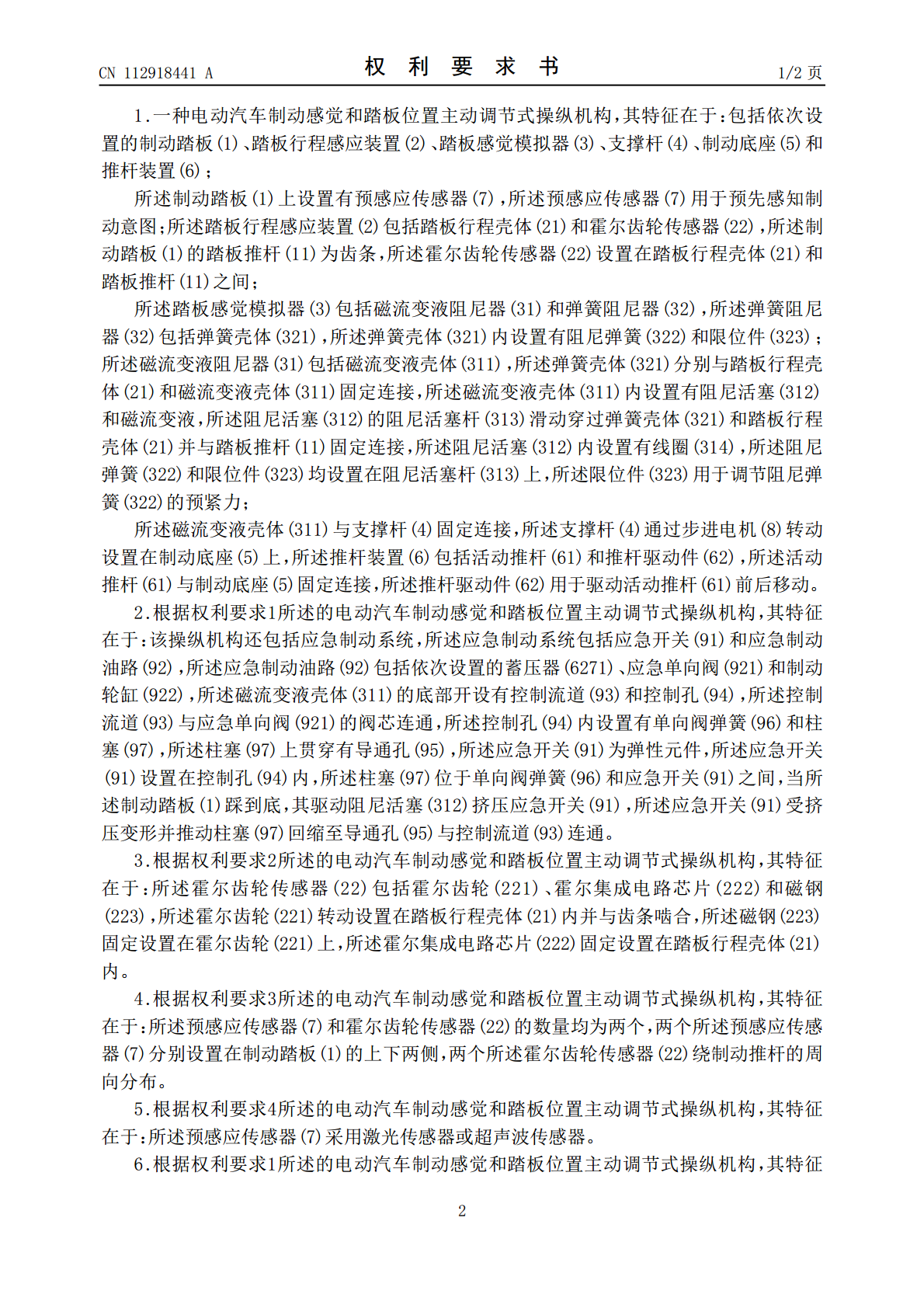
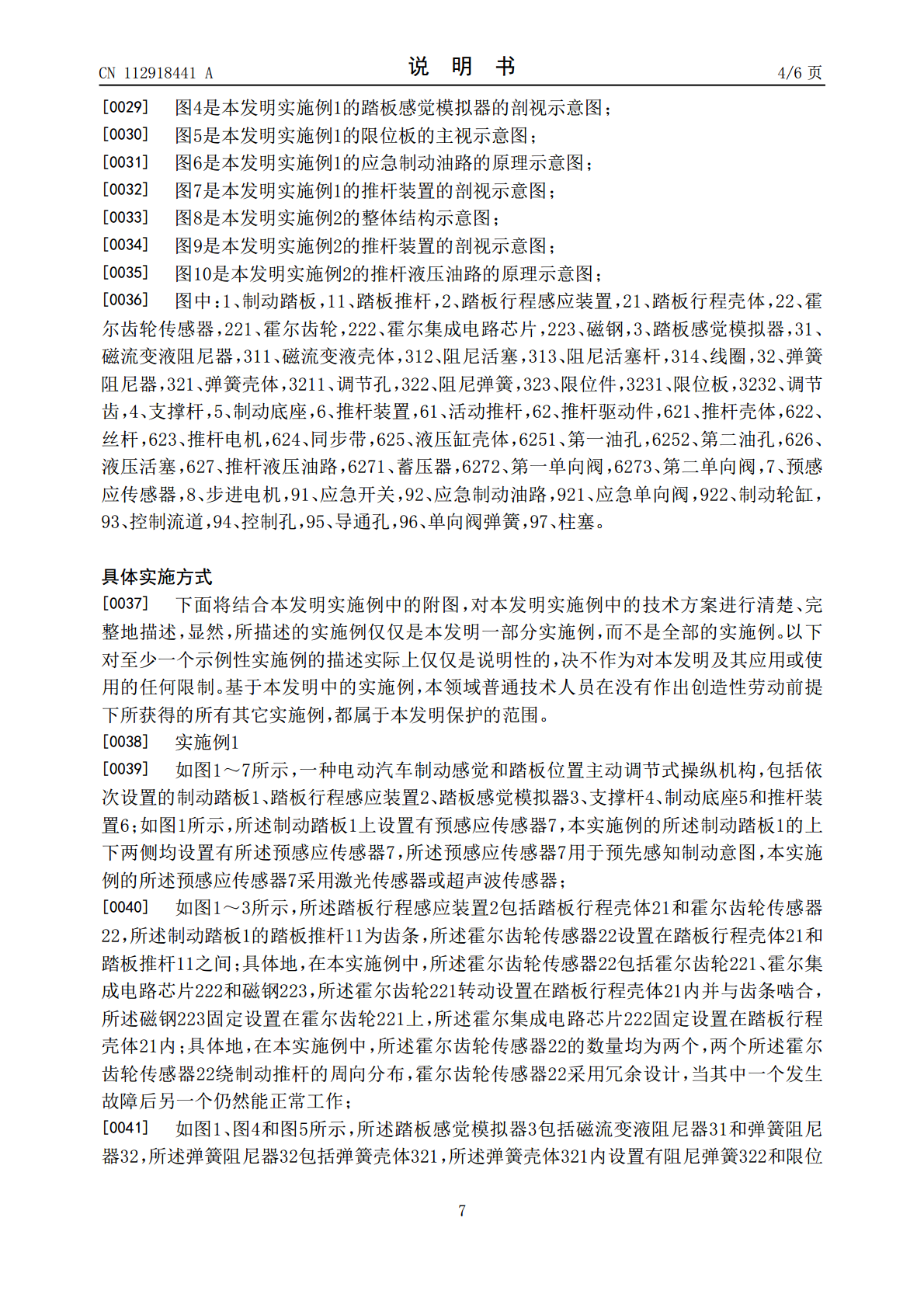
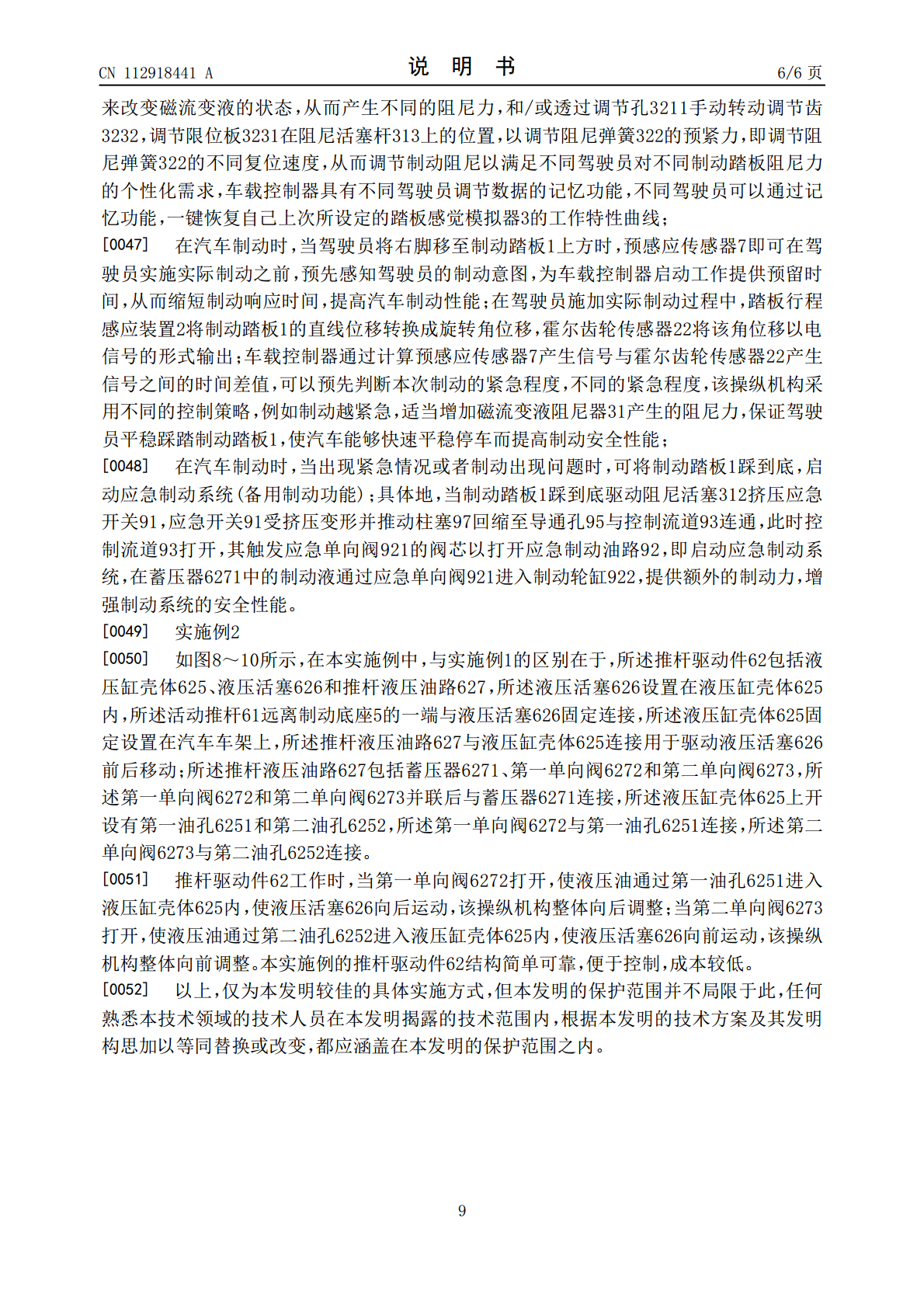
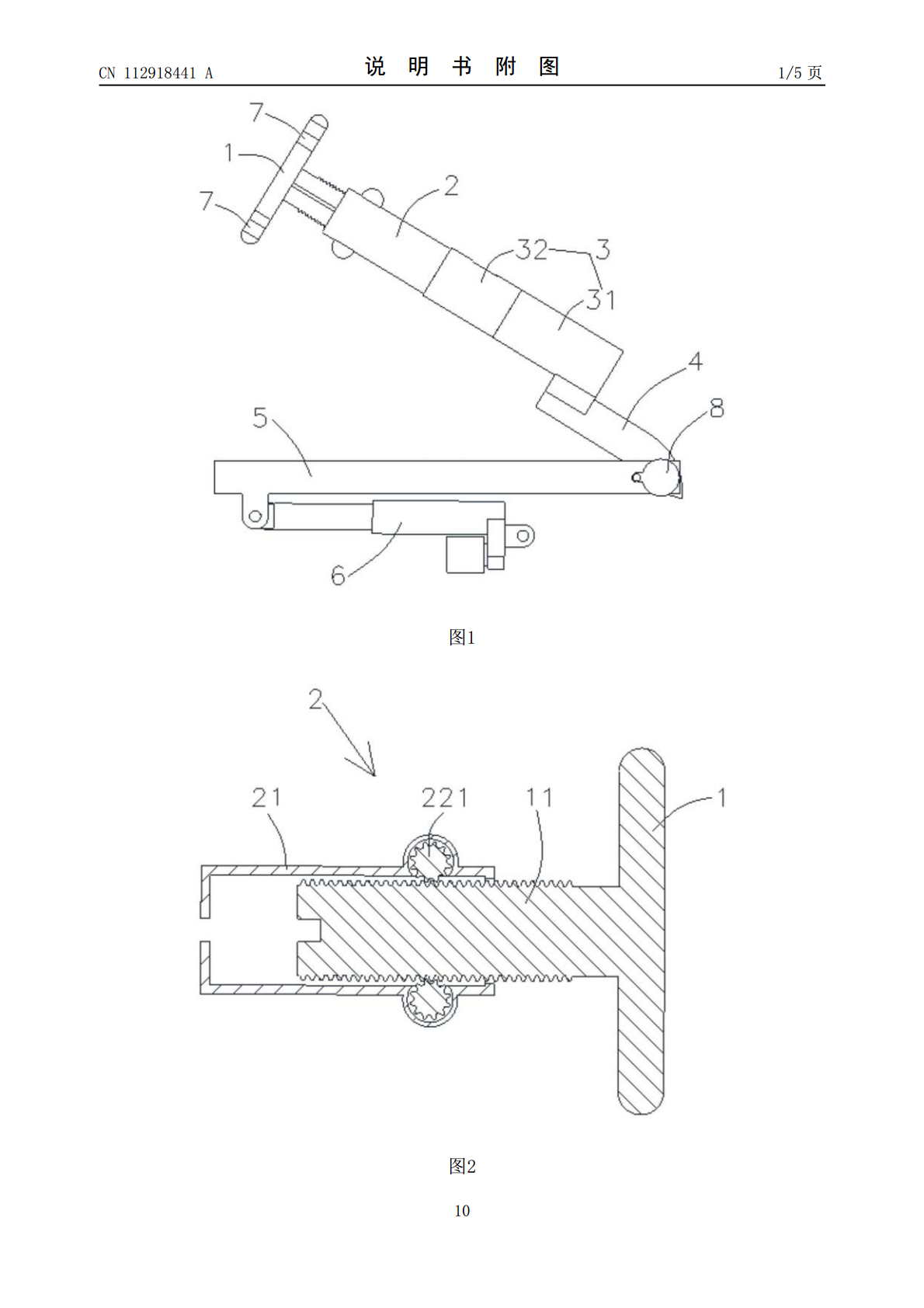
本发明尤其涉及一种电动汽车制动感觉和踏板位置主动调节式操纵机构,包括制动踏板、踏板行程感应装置、踏板感觉模拟器、支撑杆、制动底座和推杆装置;制动踏板上设有预感应传感器;踏板行程感应装置包括踏板行程壳体和设在踏板行程壳体和踏板推杆之间的霍尔齿轮传感器;踏板感觉模拟器包括磁流变液阻尼器和弹簧阻尼器,弹簧阻尼器包括弹簧壳体和设在弹簧壳体内的阻尼弹簧;磁流变液阻尼器包括磁流变液壳体和设在磁流变液壳体内的阻尼活塞和线圈,阻尼活塞杆与踏板推杆固接,阻尼活塞杆上设有调节阻尼弹簧预紧力的限位件;踏板行程壳体、弹簧壳体、磁
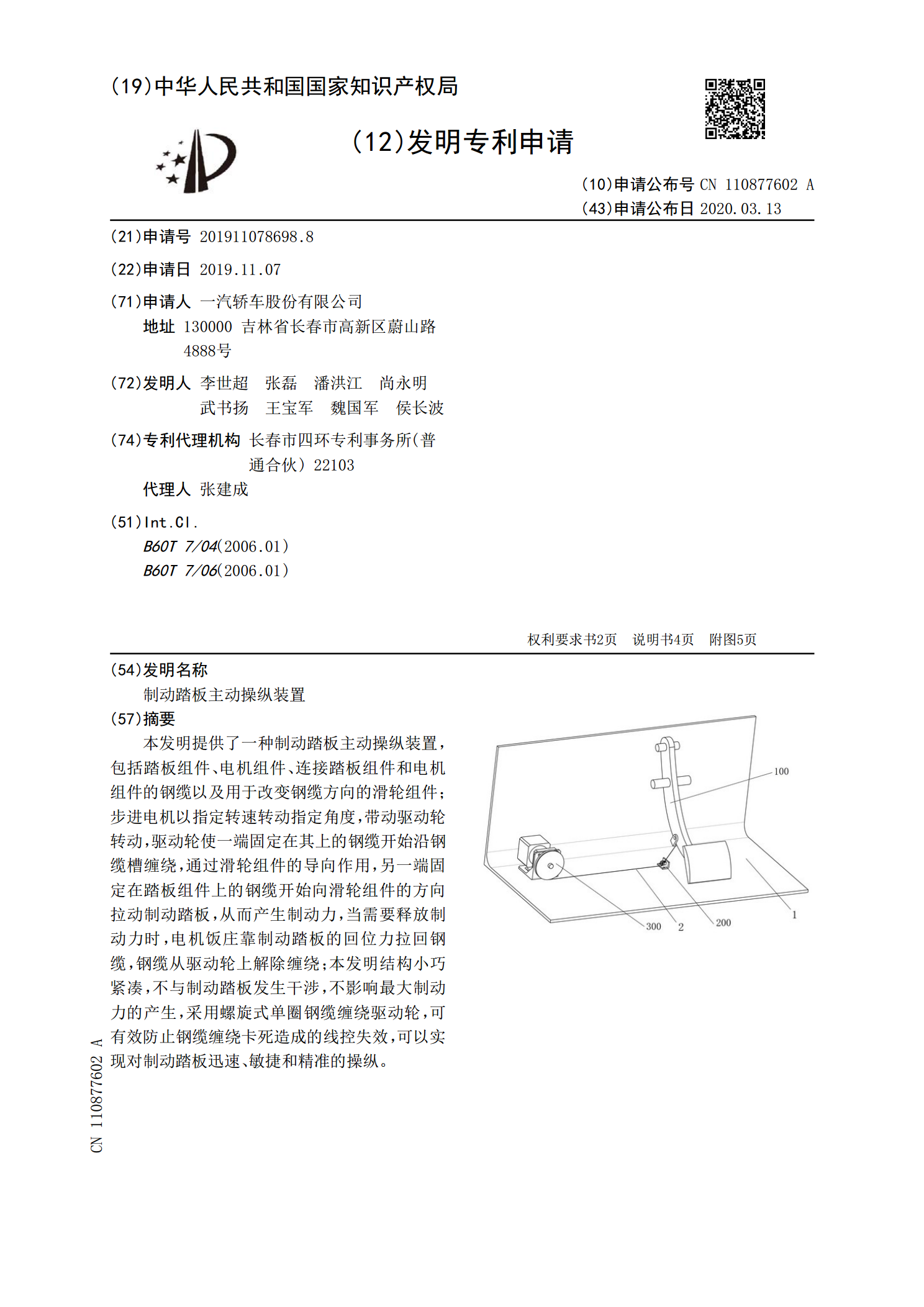
制动踏板主动操纵装置.pdf
本发明提供了一种制动踏板主动操纵装置,包括踏板组件、电机组件、连接踏板组件和电机组件的钢缆以及用于改变钢缆方向的滑轮组件;步进电机以指定转速转动指定角度,带动驱动轮转动,驱动轮使一端固定在其上的钢缆开始沿钢缆槽缠绕,通过滑轮组件的导向作用,另一端固定在踏板组件上的钢缆开始向滑轮组件的方向拉动制动踏板,从而产生制动力,当需要释放制动力时,电机饭庄靠制动踏板的回位力拉回钢缆,钢缆从驱动轮上解除缠绕;本发明结构小巧紧凑,不与制动踏板发生干涉,不影响最大制动力的产生,采用螺旋式单圈钢缆缠绕驱动轮,可有效防止钢缆缠

一种踏板感觉主动模拟式电子液压制动系统.pdf
本发明公开了一种踏板感觉主动模拟式电子液压制动系统,包括:制动踏板、储液罐、踏板感觉模拟缸,包括活塞、缸体和回位弹簧,用于向驾驶员提供踏板感觉;电子控制单元,用于接收传感器信号、计算并发出控制指令,通过导线连接至各传感器与电磁阀;电控直线驱动模块,其与所述制动主缸直接接触并根据来自所述传感器的信号驱动制动主缸的活塞进行直线运动;制动主缸,与制动轮缸通过制动管路连接,起到建立液压力的作用;电磁阀,用于打开和关闭与所述制动主缸及踏板感觉模拟缸所连接的液压管路,从而实现主动模拟踏板感觉,并保证在失效情况下具有制
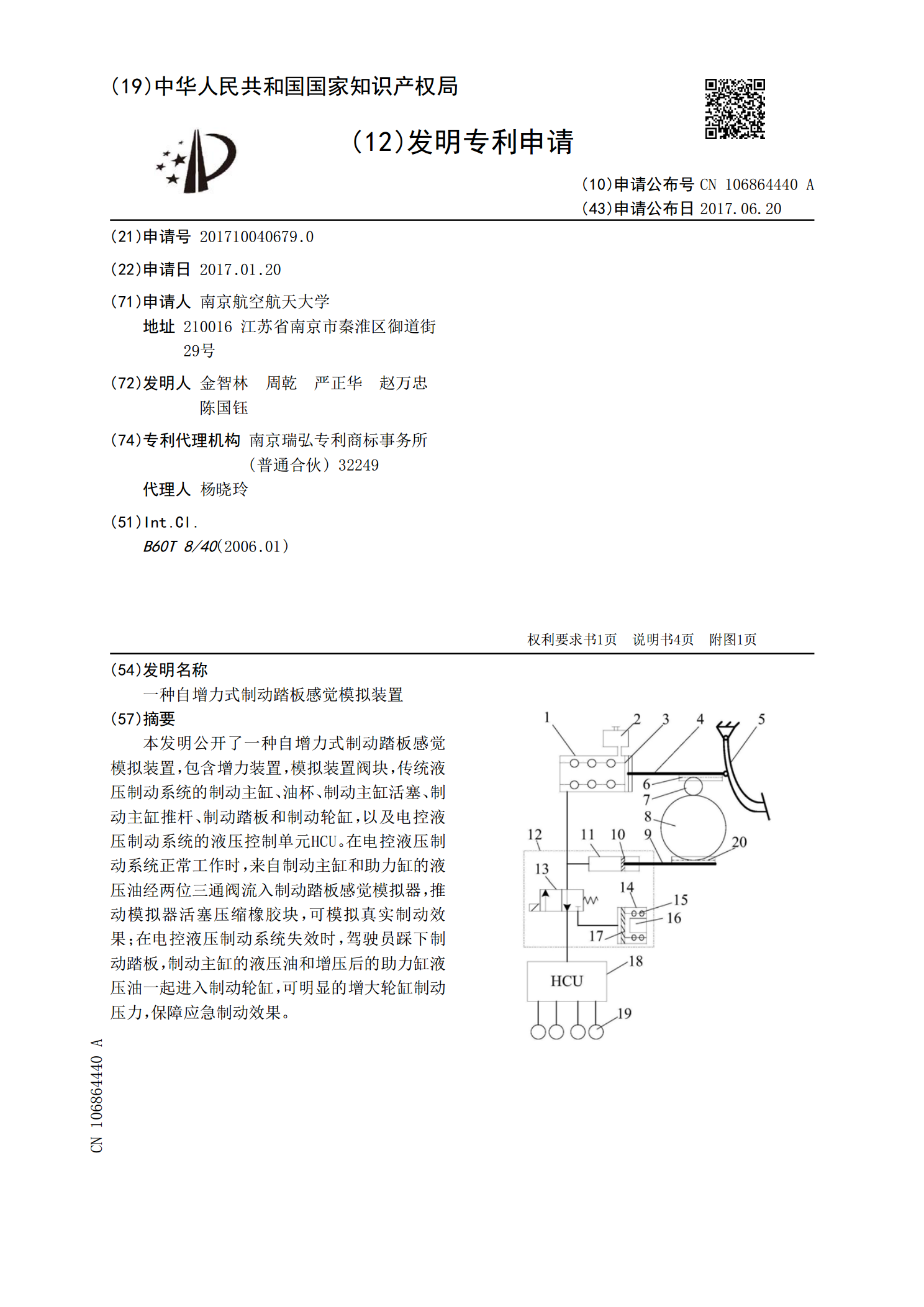
一种自增力式制动踏板感觉模拟装置.pdf
本发明公开了一种自增力式制动踏板感觉模拟装置,包含增力装置,模拟装置阀块,传统液压制动系统的制动主缸、油杯、制动主缸活塞、制动主缸推杆、制动踏板和制动轮缸,以及电控液压制动系统的液压控制单元HCU。在电控液压制动系统正常工作时,来自制动主缸和助力缸的液压油经两位三通阀流入制动踏板感觉模拟器,推动模拟器活塞压缩橡胶块,可模拟真实制动效果;在电控液压制动系统失效时,驾驶员踩下制动踏板,制动主缸的液压油和增压后的助力缸液压油一起进入制动轮缸,可明显的增大轮缸制动压力,保障应急制动效果。

一种小型车踏板的位置调节机构.pdf
本发明公开了一种小型车踏板的位置调节机构,包括底座、踏板安装板和调节板;踏板安装板能够在底座上滑动;踏板安装板下表面设置第一限位单元,调节板上表面设置第二限位单元,通过第一限位单元和第二限位单元的啮合实现踏板安装板的定位;调节板与底座转动连接,在调节板和底座之间设置回弹机构;踏板安装在踏板安装板上;所述回弹机构可以通过扭簧与连接轴配合实现;所述第一限位单元和第二限位单元均可以采用齿带,通过齿带的啮合实现踏板安装板的定位。本发明机构通过简单的按压调节板来调节踏板相对于底座的位置,能够根据玩家实际身高和体型将