
一种可自适应不同高度的番茄采摘机器人.pdf

秋花****姐姐


1/9
2/9

3/9

4/9
5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可自适应不同高度的番茄采摘机器人.pdf
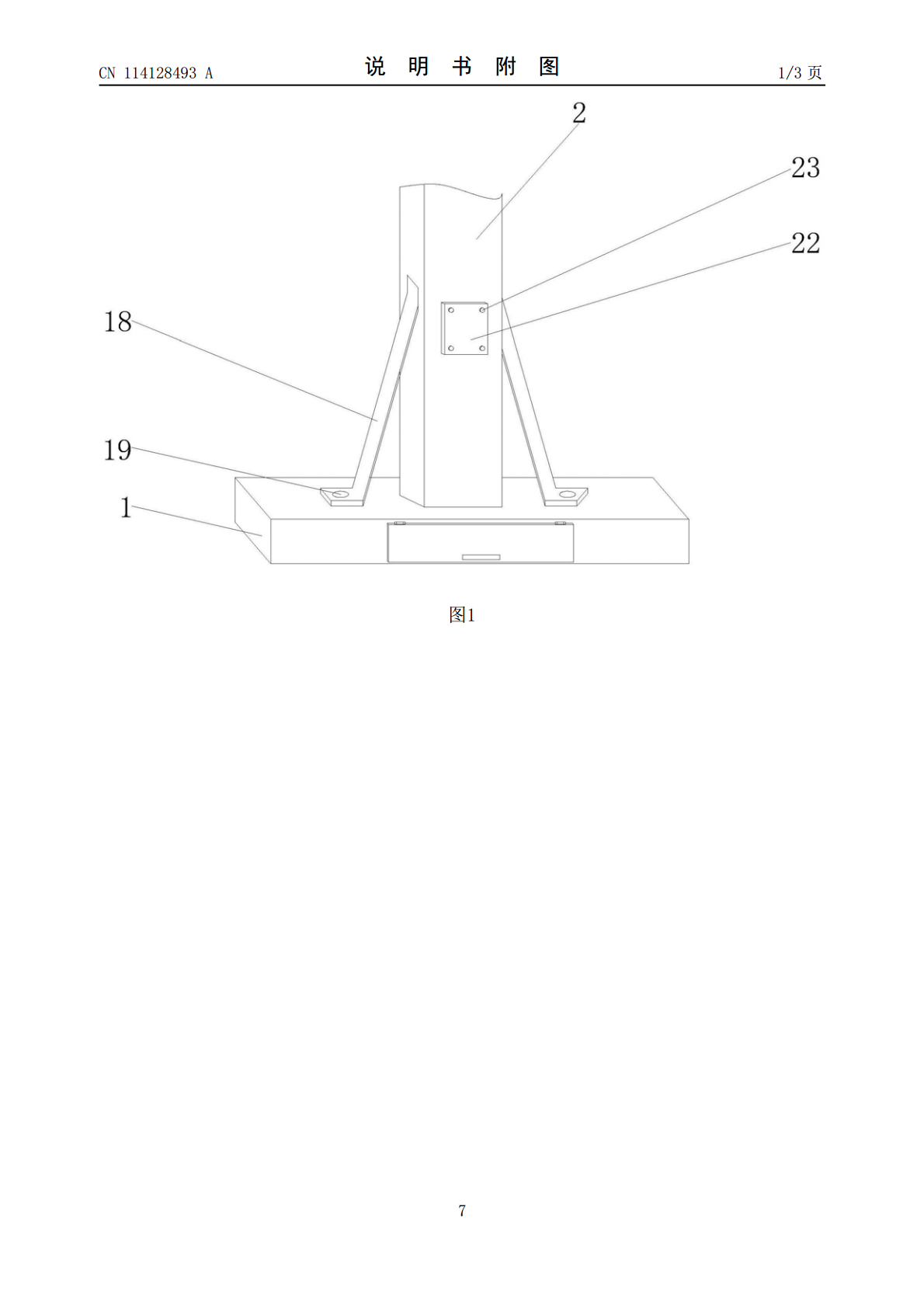
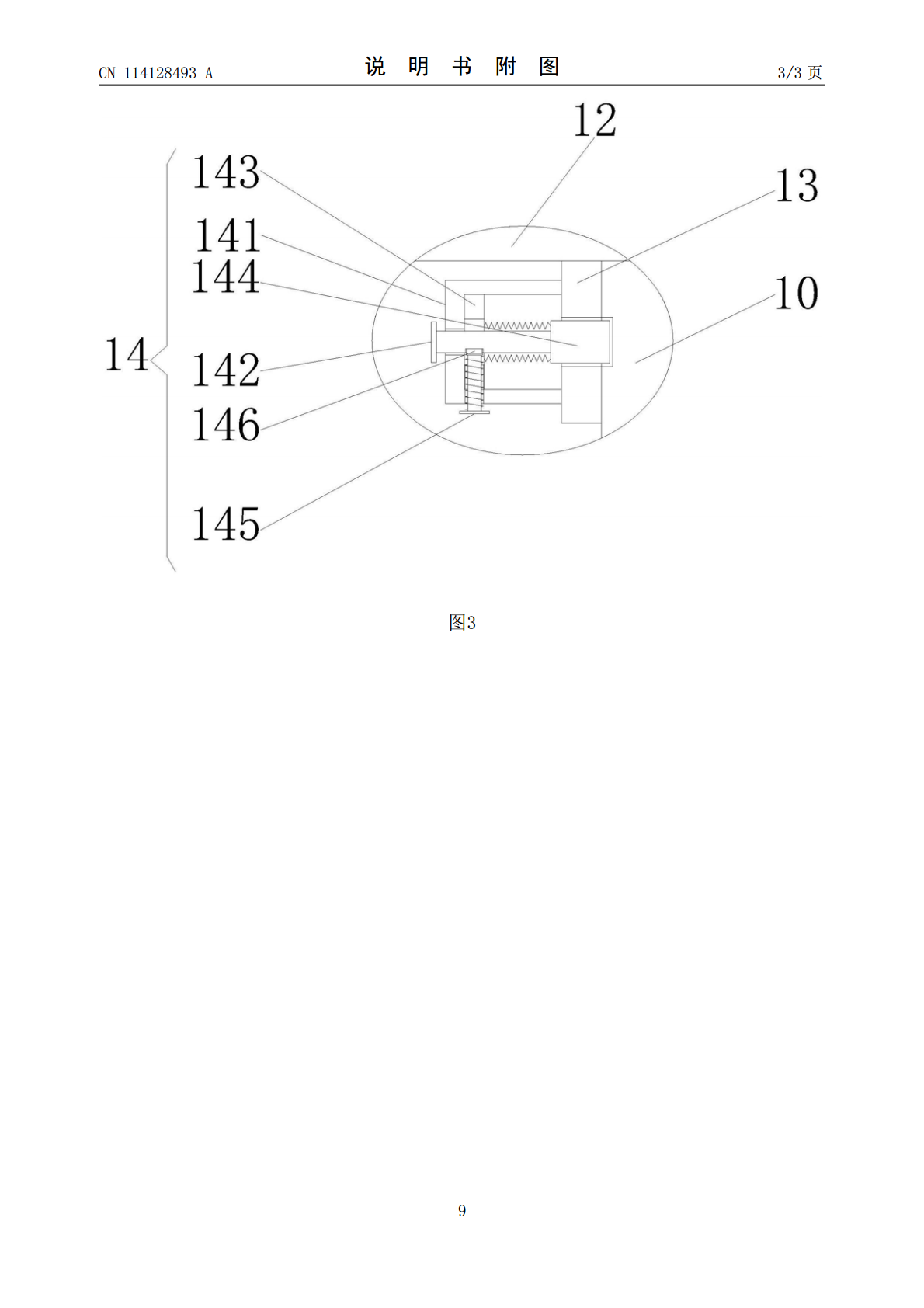
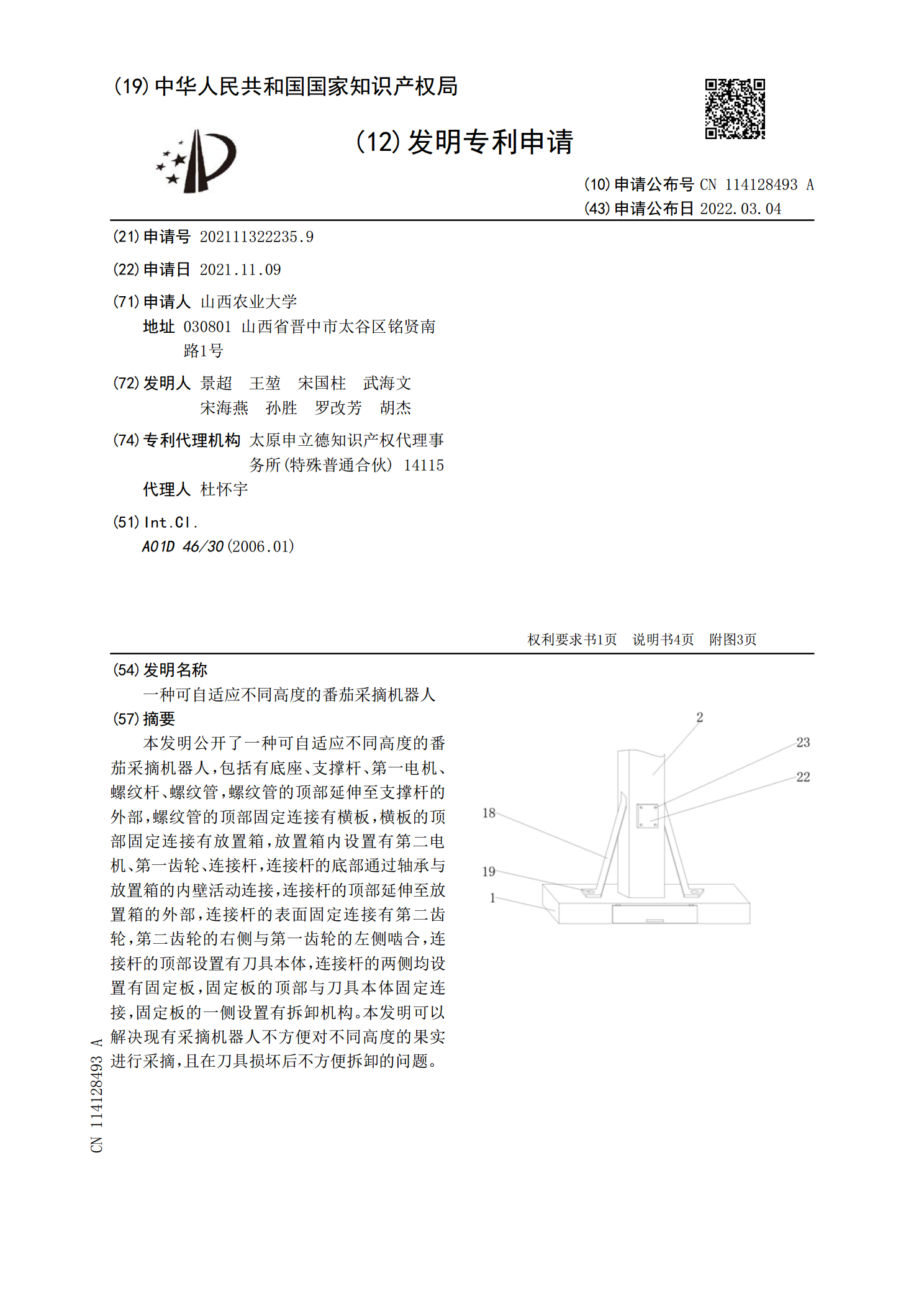
本发明公开了一种可自适应不同高度的番茄采摘机器人,包括有底座、支撑杆、第一电机、螺纹杆、螺纹管,螺纹管的顶部延伸至支撑杆的外部,螺纹管的顶部固定连接有横板,横板的顶部固定连接有放置箱,放置箱内设置有第二电机、第一齿轮、连接杆,连接杆的底部通过轴承与放置箱的内壁活动连接,连接杆的顶部延伸至放置箱的外部,连接杆的表面固定连接有第二齿轮,第二齿轮的右侧与第一齿轮的左侧啮合,连接杆的顶部设置有刀具本体,连接杆的两侧均设置有固定板,固定板的顶部与刀具本体固定连接,固定板的一侧设置有拆卸机构。本发明可以解决现有采摘机
一种可搬运不同高度物品的物流运输小机器人.pdf
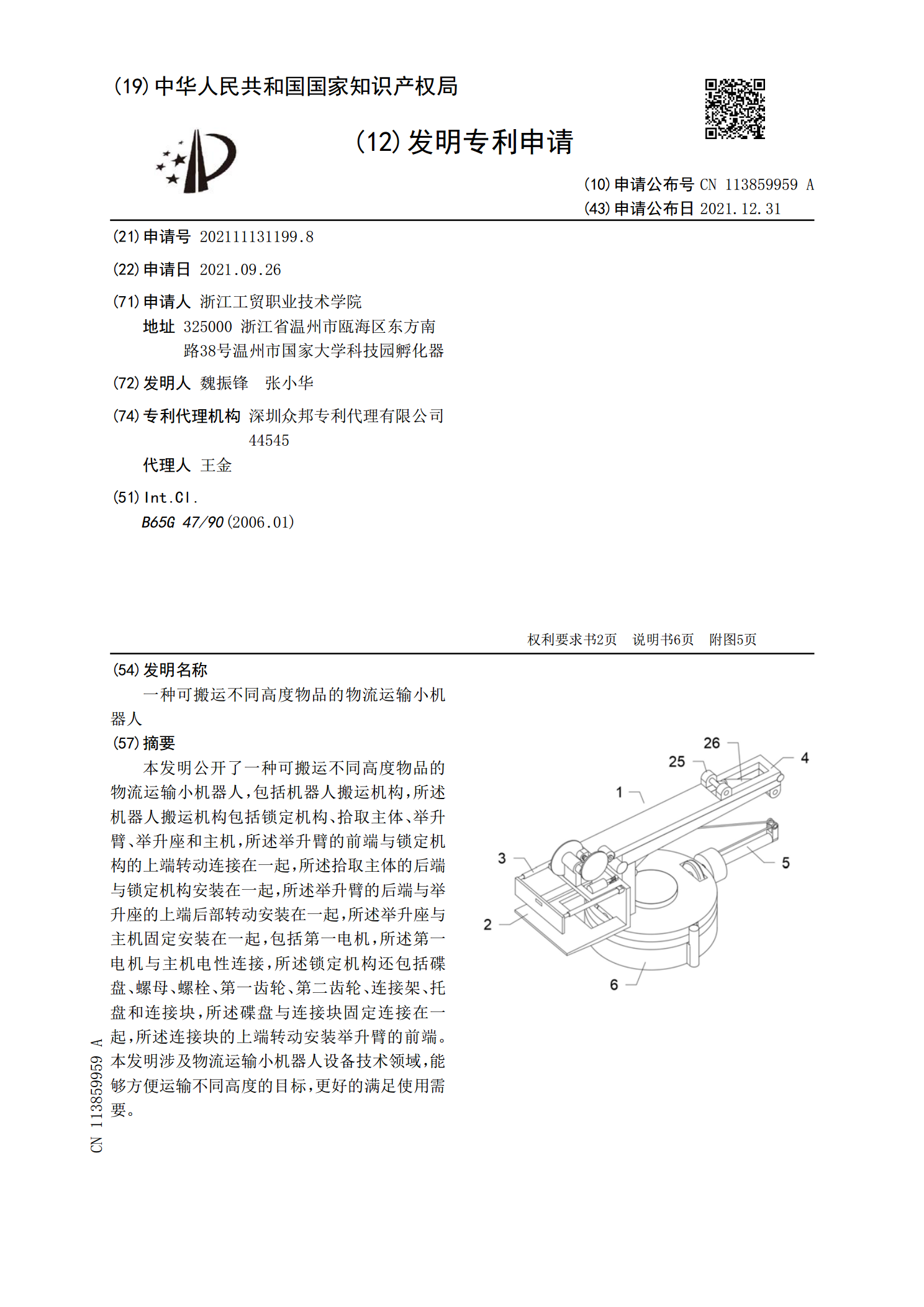
本发明公开了一种可搬运不同高度物品的物流运输小机器人,包括机器人搬运机构,所述机器人搬运机构包括锁定机构、拾取主体、举升臂、举升座和主机,所述举升臂的前端与锁定机构的上端转动连接在一起,所述拾取主体的后端与锁定机构安装在一起,所述举升臂的后端与举升座的上端后部转动安装在一起,所述举升座与主机固定安装在一起,包括第一电机,所述第一电机与主机电性连接,所述锁定机构还包括碟盘、螺母、螺栓、第一齿轮、第二齿轮、连接架、托盘和连接块,所述碟盘与连接块固定连接在一起,所述连接块的上端转动安装举升臂的前端。本发明涉及物

番茄采摘机器人及其控制方法.pdf
本发明公开了一种番茄采摘机器人及其控制方法,包括底盘,所述底盘的上端且前方设有雷达扫描装置,所述雷达扫描装置的上方设有显示装置,所述显示装置的上方设有图像采集结构;所述底盘的上端且后方设有工控机,所述工控机的上方设有收纳装置;所述底盘的上端且中部设有机械手结构;所述底盘的下端设于滚轮结构;所述机器人还包括自动充电装置。本发明提供一种番茄采摘机器人及其控制方法,替代人工操作,完成番茄的智能采摘动作,自动化程度高,省时省力,节省人力成本。

温室番茄采摘机器人系统的研究.pptx
温室番茄采摘机器人系统目录添加目录项标题温室番茄采摘机器人系统的概述定义和功能研究背景和意义国内外研究现状和发展趋势温室番茄采摘机器人系统的组成和工作原理系统组成工作原理关键技术问题及解决方案温室番茄采摘机器人系统的设计和实现机械结构设计控制系统设计传感器系统设计人机交互设计温室番茄采摘机器人系统的实验和性能评估实验方案和实验条件实验结果和性能评估结果分析和讨论温室番茄采摘机器人系统的应用和推广在温室番茄种植中的应用对传统农业的影响和改变在其他领域的应用和推广结论和展望研究结论研究不足和展望感谢观看
一种番茄采摘机器人的植株与果实检测算法.pdf
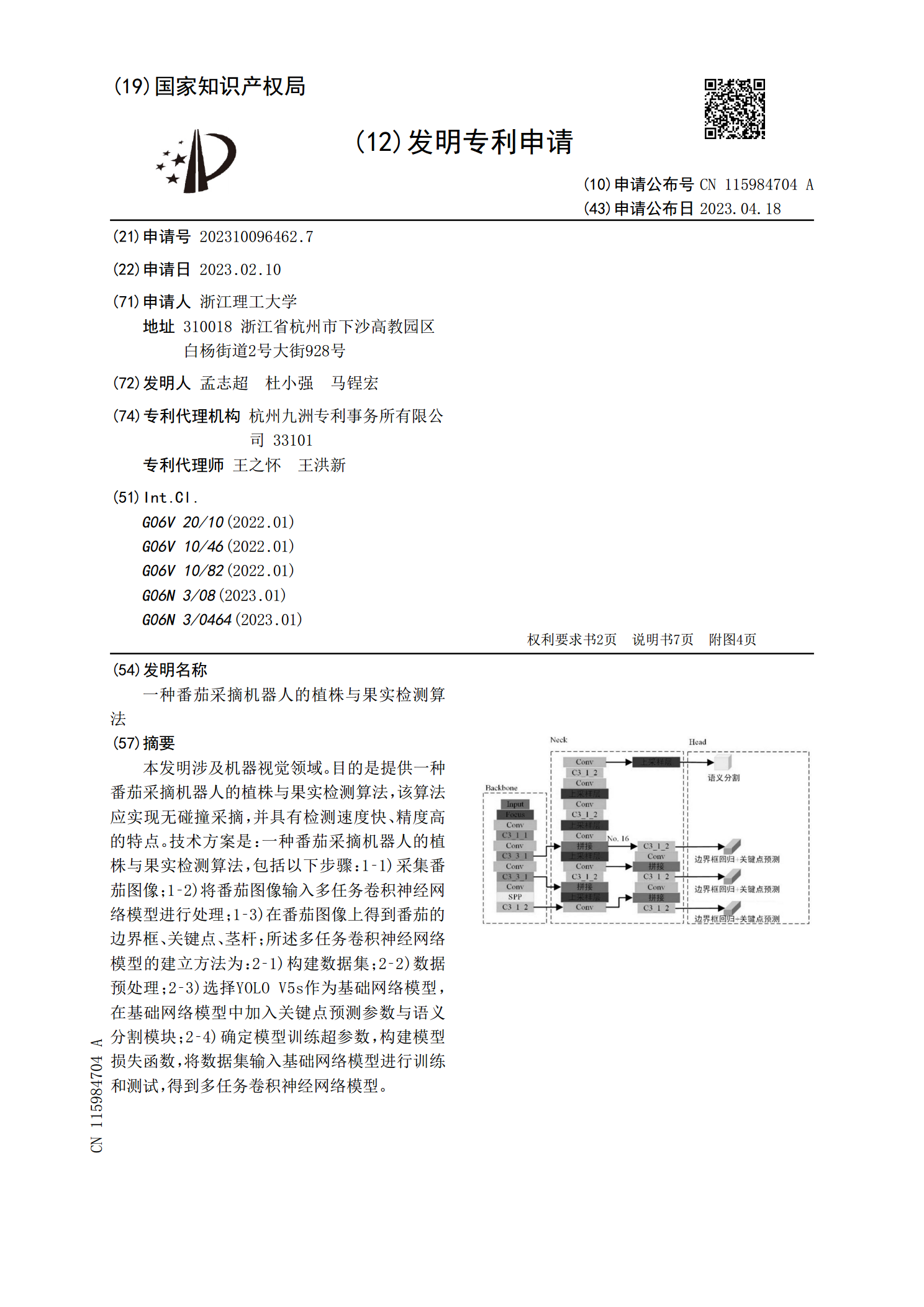
本发明涉及机器视觉领域。目的是提供一种番茄采摘机器人的植株与果实检测算法,该算法应实现无碰撞采摘,并具有检测速度快、精度高的特点。技术方案是:一种番茄采摘机器人的植株与果实检测算法,包括以下步骤:1‑1)采集番茄图像;1‑2)将番茄图像输入多任务卷积神经网络模型进行处理;1‑3)在番茄图像上得到番茄的边界框、关键点、茎杆;所述多任务卷积神经网络模型的建立方法为:2‑1)构建数据集;2‑2)数据预处理;2‑3)选择YOLOV5s作为基础网络模型,在基础网络模型中加入关键点预测参数与语义分割模块;2‑4)确