
一种可搬运不同高度物品的物流运输小机器人.pdf

是你****嘉嘉

1/10

2/10
3/10
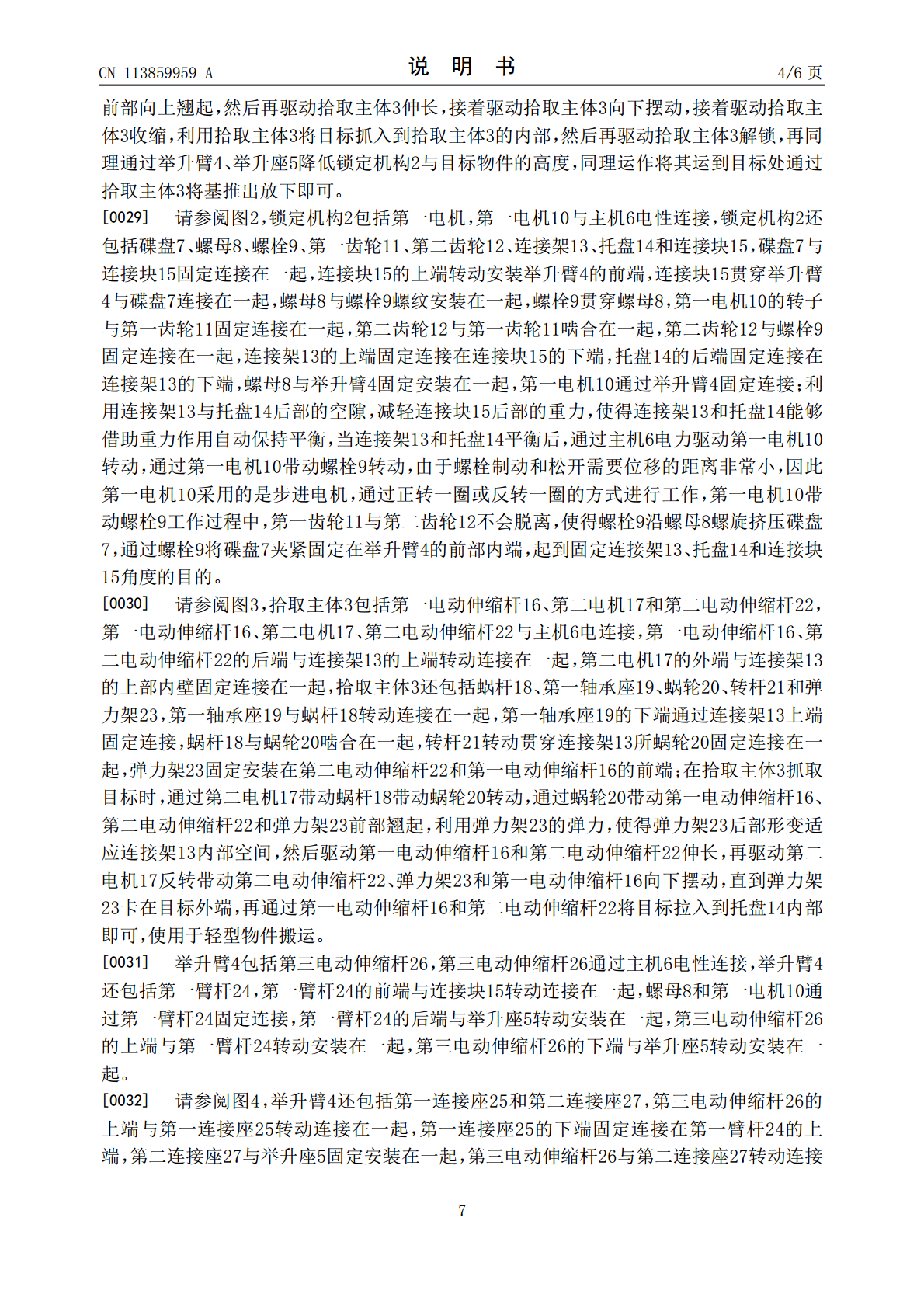
4/10
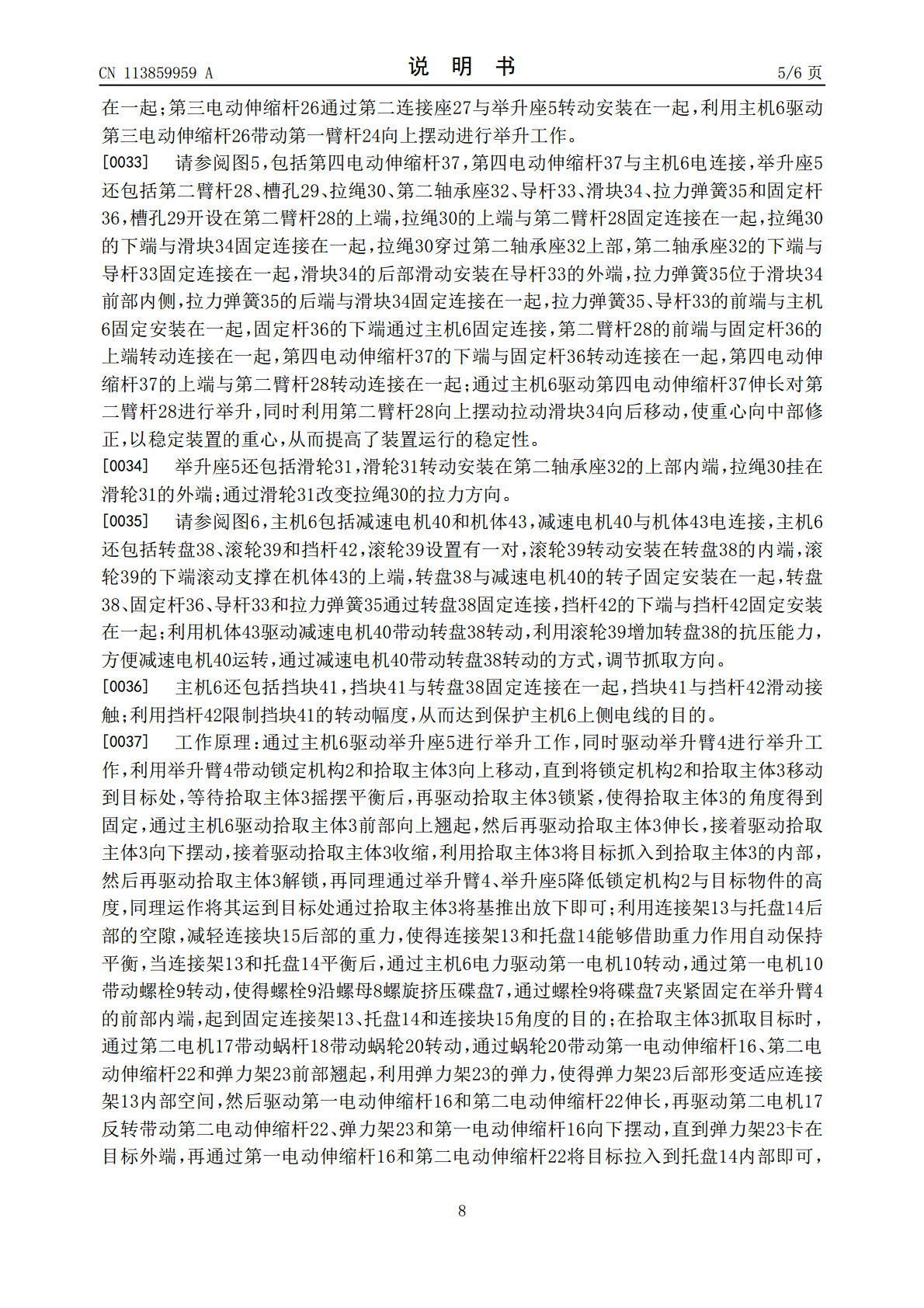
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可搬运不同高度物品的物流运输小机器人.pdf
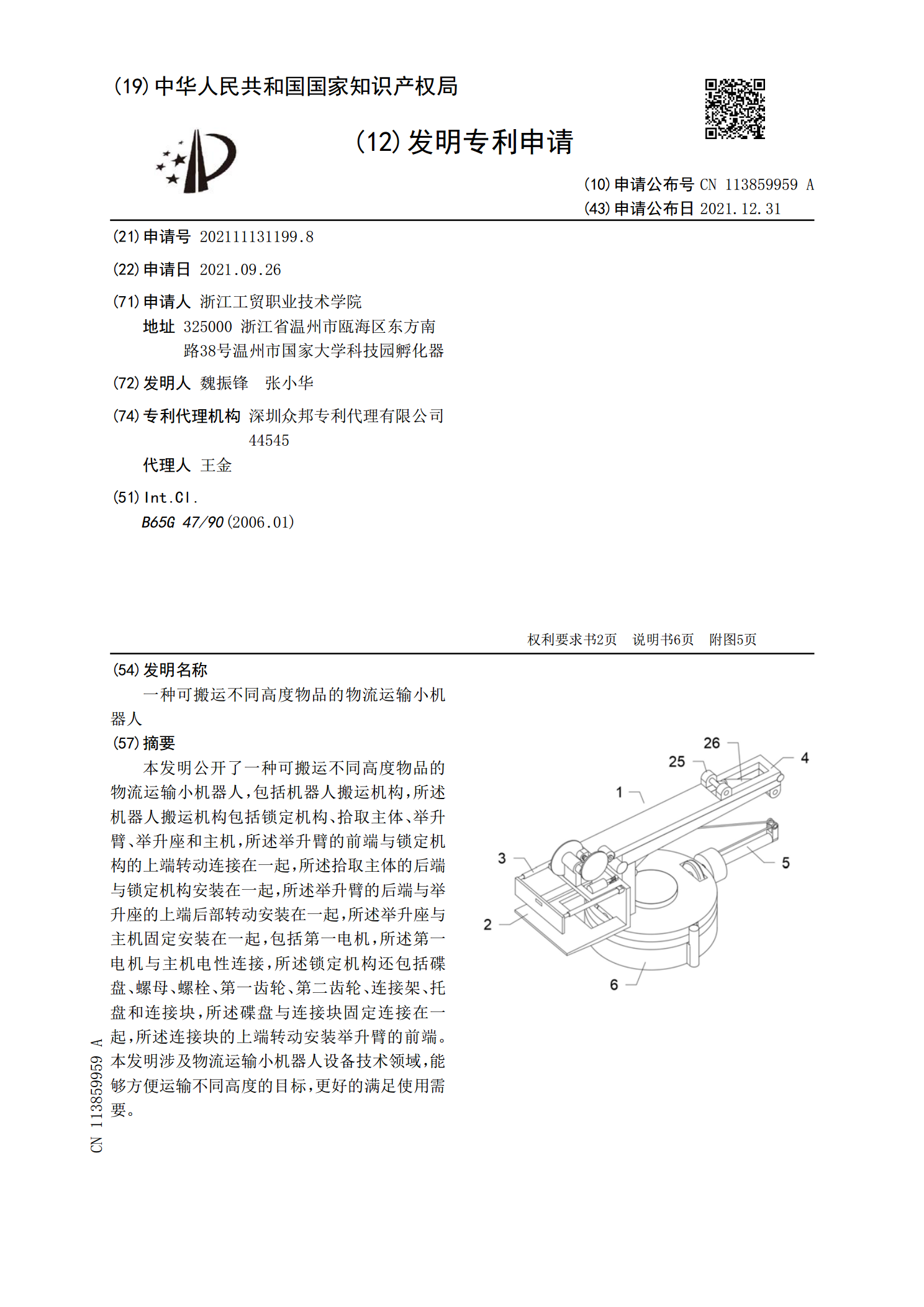
本发明公开了一种可搬运不同高度物品的物流运输小机器人,包括机器人搬运机构,所述机器人搬运机构包括锁定机构、拾取主体、举升臂、举升座和主机,所述举升臂的前端与锁定机构的上端转动连接在一起,所述拾取主体的后端与锁定机构安装在一起,所述举升臂的后端与举升座的上端后部转动安装在一起,所述举升座与主机固定安装在一起,包括第一电机,所述第一电机与主机电性连接,所述锁定机构还包括碟盘、螺母、螺栓、第一齿轮、第二齿轮、连接架、托盘和连接块,所述碟盘与连接块固定连接在一起,所述连接块的上端转动安装举升臂的前端。本发明涉及物
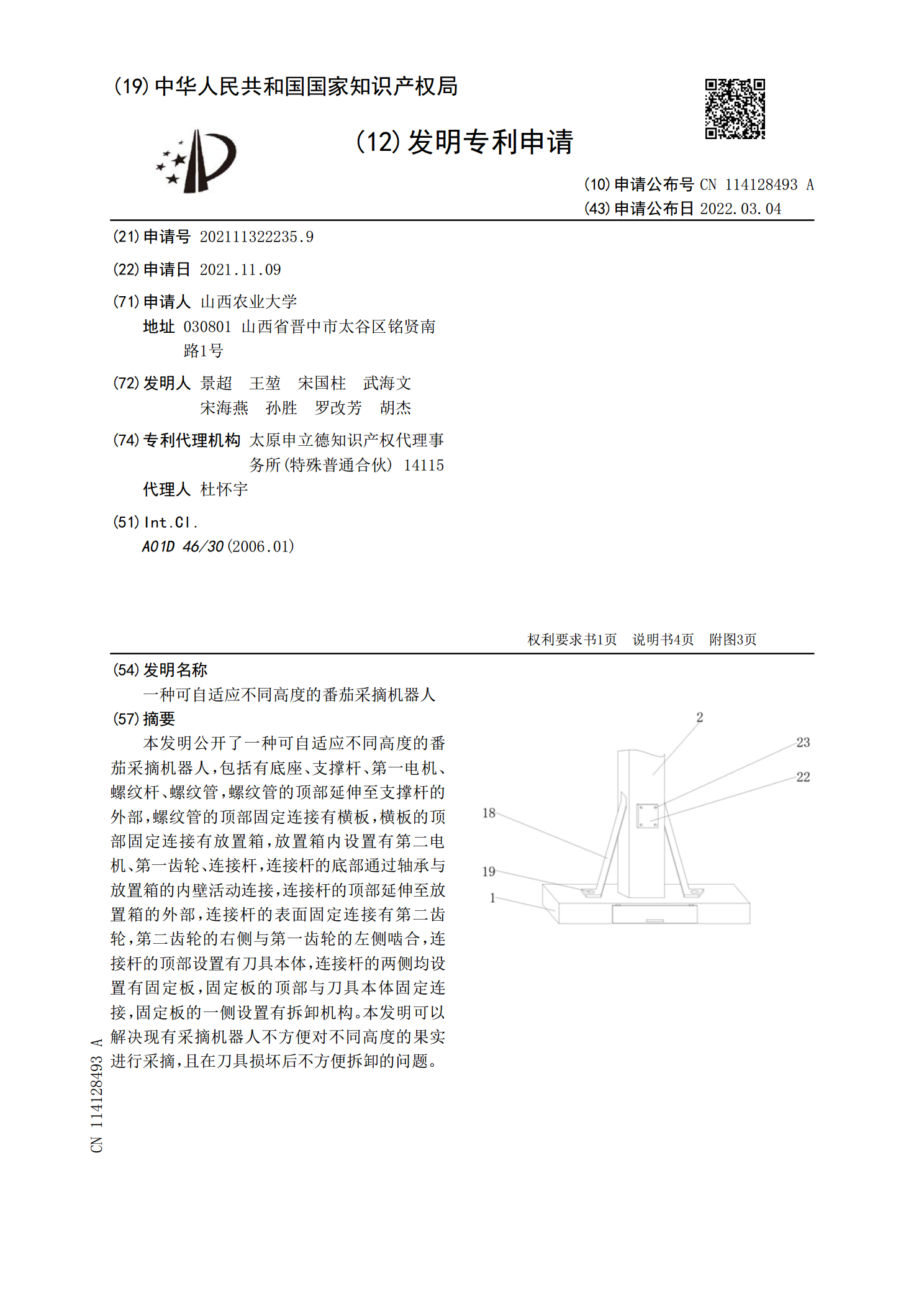
一种可自适应不同高度的番茄采摘机器人.pdf
本发明公开了一种可自适应不同高度的番茄采摘机器人,包括有底座、支撑杆、第一电机、螺纹杆、螺纹管,螺纹管的顶部延伸至支撑杆的外部,螺纹管的顶部固定连接有横板,横板的顶部固定连接有放置箱,放置箱内设置有第二电机、第一齿轮、连接杆,连接杆的底部通过轴承与放置箱的内壁活动连接,连接杆的顶部延伸至放置箱的外部,连接杆的表面固定连接有第二齿轮,第二齿轮的右侧与第一齿轮的左侧啮合,连接杆的顶部设置有刀具本体,连接杆的两侧均设置有固定板,固定板的顶部与刀具本体固定连接,固定板的一侧设置有拆卸机构。本发明可以解决现有采摘机

一种球类物品搬运机器人.pdf
本发明涉及机器人设备领域,一种球类物品搬运机器人,包括固定机构、传动机构、夹取机构和运输箱。所述的固定机构包括支撑架、一号转轮、二号转轮、一号传送带、一号转轴和传动轴;所述的支撑架内安装有控制装置和电机;所述的一号转轮安装在一号转轴上,一号转轮的数量为六个;本发明提供一种球类物品搬运机器人,设计了一个可以270度转动的夹取机构,同时设计了两种类型的夹具,利用夹具横向运动和纵向运动两种运动形式来实现对球的夹紧。
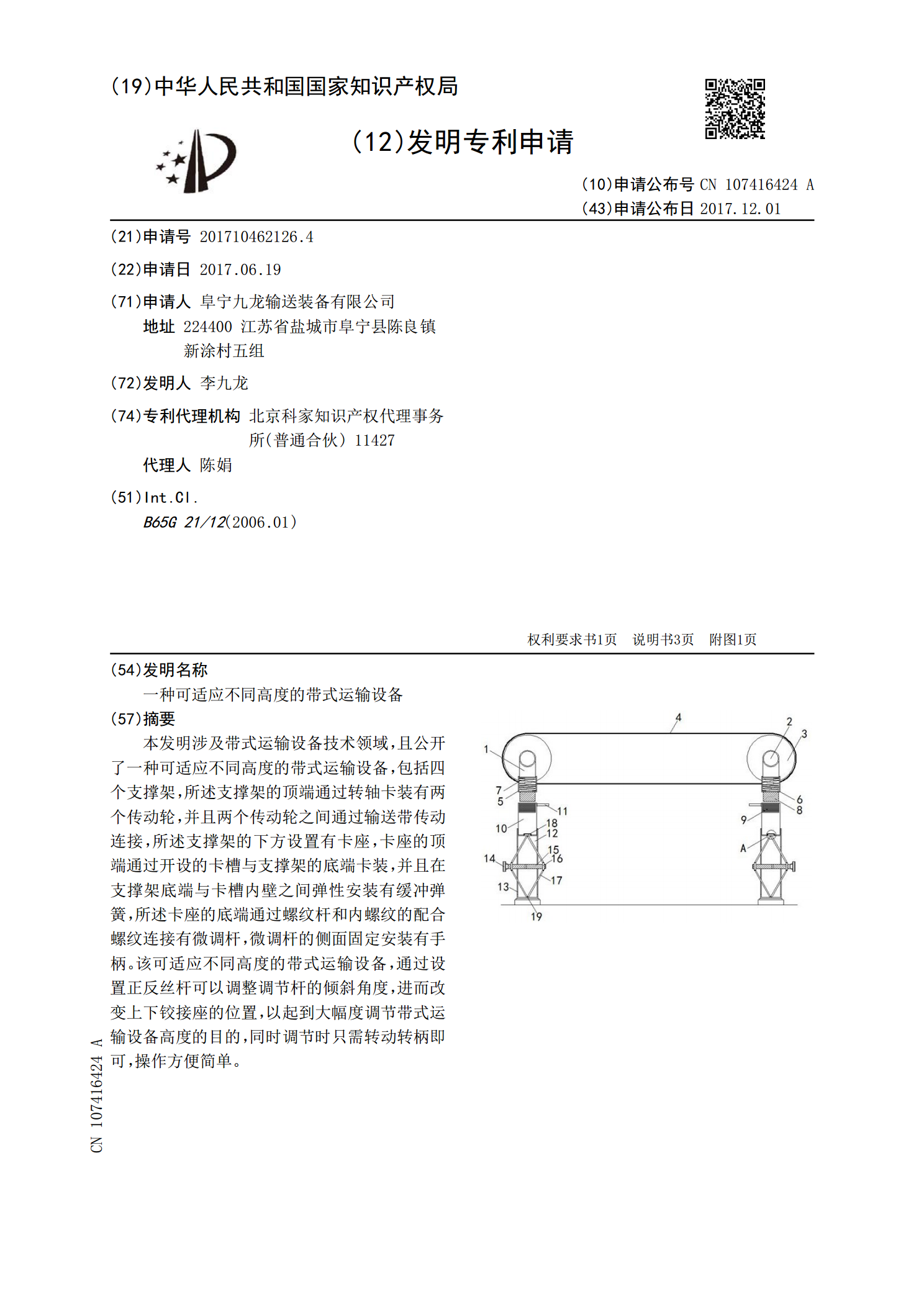
一种可适应不同高度的带式运输设备.pdf
本发明涉及带式运输设备技术领域,且公开了一种可适应不同高度的带式运输设备,包括四个支撑架,所述支撑架的顶端通过转轴卡装有两个传动轮,并且两个传动轮之间通过输送带传动连接,所述支撑架的下方设置有卡座,卡座的顶端通过开设的卡槽与支撑架的底端卡装,并且在支撑架底端与卡槽内壁之间弹性安装有缓冲弹簧,所述卡座的底端通过螺纹杆和内螺纹的配合螺纹连接有微调杆,微调杆的侧面固定安装有手柄。该可适应不同高度的带式运输设备,通过设置正反丝杆可以调整调节杆的倾斜角度,进而改变上下铰接座的位置,以起到大幅度调节带式运输设备高度的
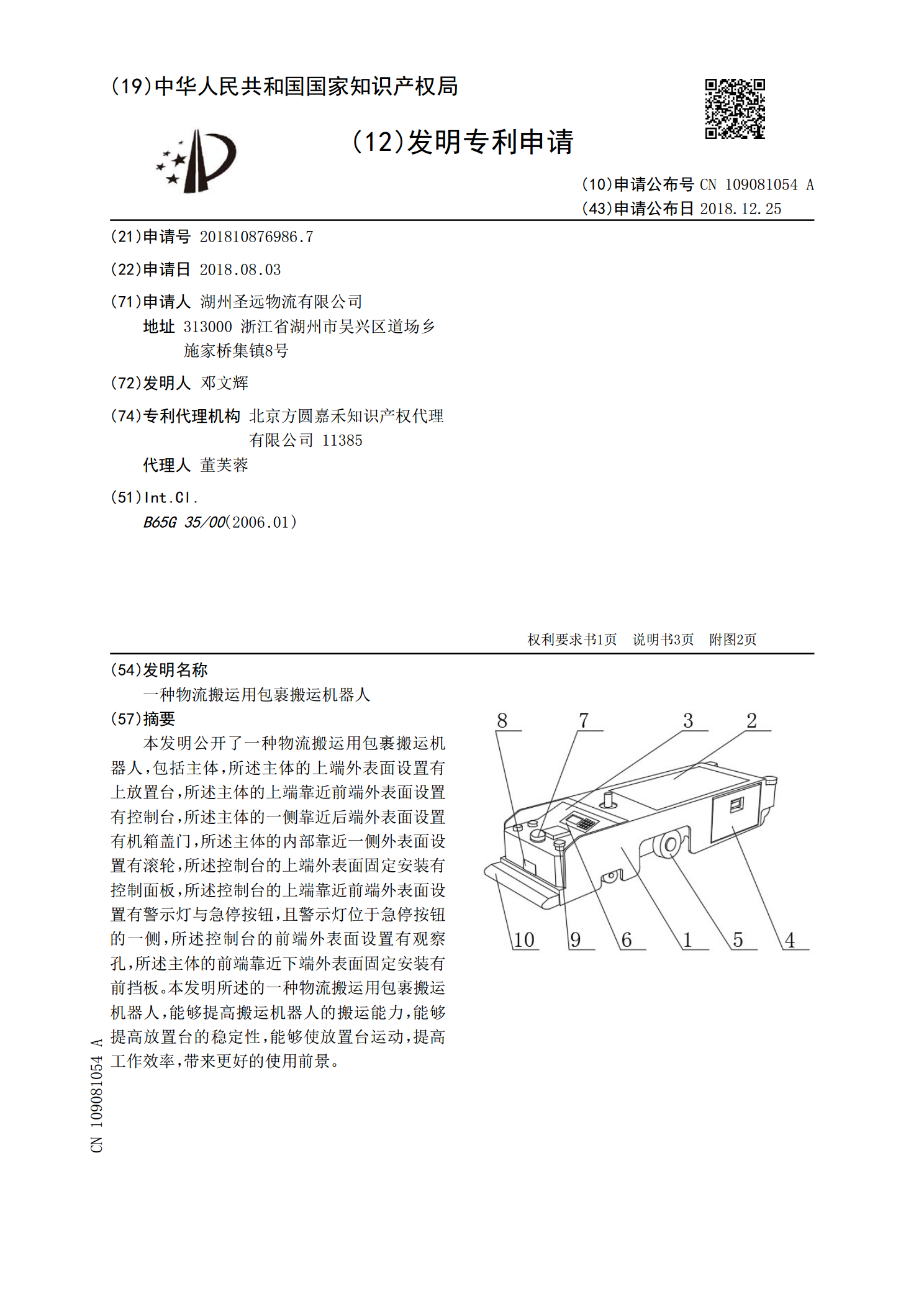
一种物流搬运用包裹搬运机器人.pdf
本发明公开了一种物流搬运用包裹搬运机器人,包括主体,所述主体的上端外表面设置有上放置台,所述主体的上端靠近前端外表面设置有控制台,所述主体的一侧靠近后端外表面设置有机箱盖门,所述主体的内部靠近一侧外表面设置有滚轮,所述控制台的上端外表面固定安装有控制面板,所述控制台的上端靠近前端外表面设置有警示灯与急停按钮,且警示灯位于急停按钮的一侧,所述控制台的前端外表面设置有观察孔,所述主体的前端靠近下端外表面固定安装有前挡板。本发明所述的一种物流搬运用包裹搬运机器人,能够提高搬运机器人的搬运能力,能够提高放置台的稳