
一种番茄采摘机器人的植株与果实检测算法.pdf

猫巷****奕声


1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种番茄采摘机器人的植株与果实检测算法.pdf
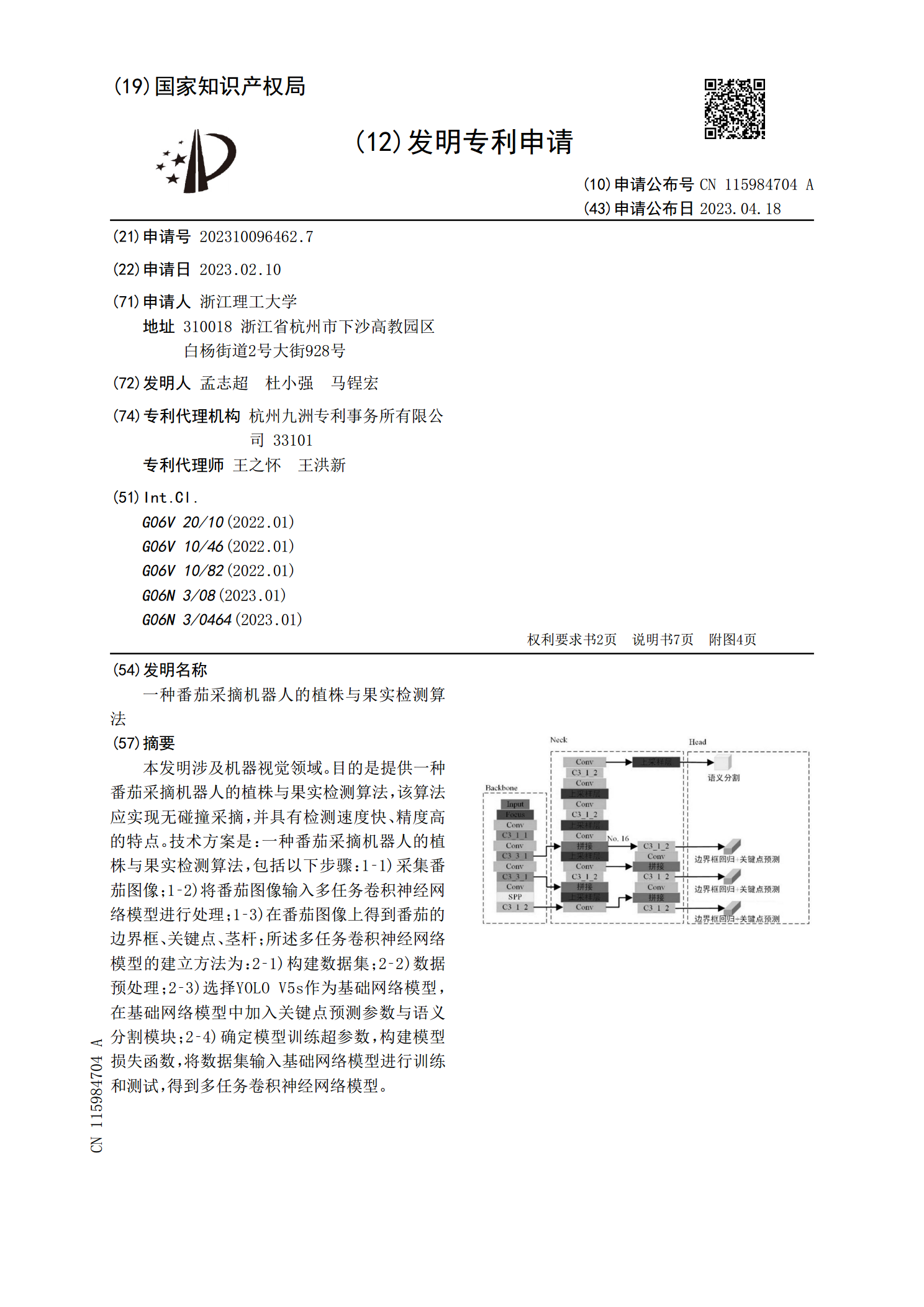
本发明涉及机器视觉领域。目的是提供一种番茄采摘机器人的植株与果实检测算法,该算法应实现无碰撞采摘,并具有检测速度快、精度高的特点。技术方案是:一种番茄采摘机器人的植株与果实检测算法,包括以下步骤:1‑1)采集番茄图像;1‑2)将番茄图像输入多任务卷积神经网络模型进行处理;1‑3)在番茄图像上得到番茄的边界框、关键点、茎杆;所述多任务卷积神经网络模型的建立方法为:2‑1)构建数据集;2‑2)数据预处理;2‑3)选择YOLOV5s作为基础网络模型,在基础网络模型中加入关键点预测参数与语义分割模块;2‑4)确

番茄果实的物理和机械性能与采摘机器人的关系.doc
食品工程杂志103(2011)170–178内容列表在期刊食品工程杂志中杂志主页:www.elsevier.com/locate/jfoodeng番茄果实的物理和机械性能与采摘机器人的关系ZhiguoLi,PingpingLi,JizhanLiu江苏大学农业工程研究所,212013,中国镇江文章信息文章历史:被收入于2010年5月25日收入修订后的表格于2010年9月14日被公认于2010年10月7日在线可阅2010年10月25日关键词:西红柿腔室数目物理性质机械性能采摘机器人摘要为了更好的设计,制造和控
番茄果实串采摘末端执行器及其采摘方法.pdf
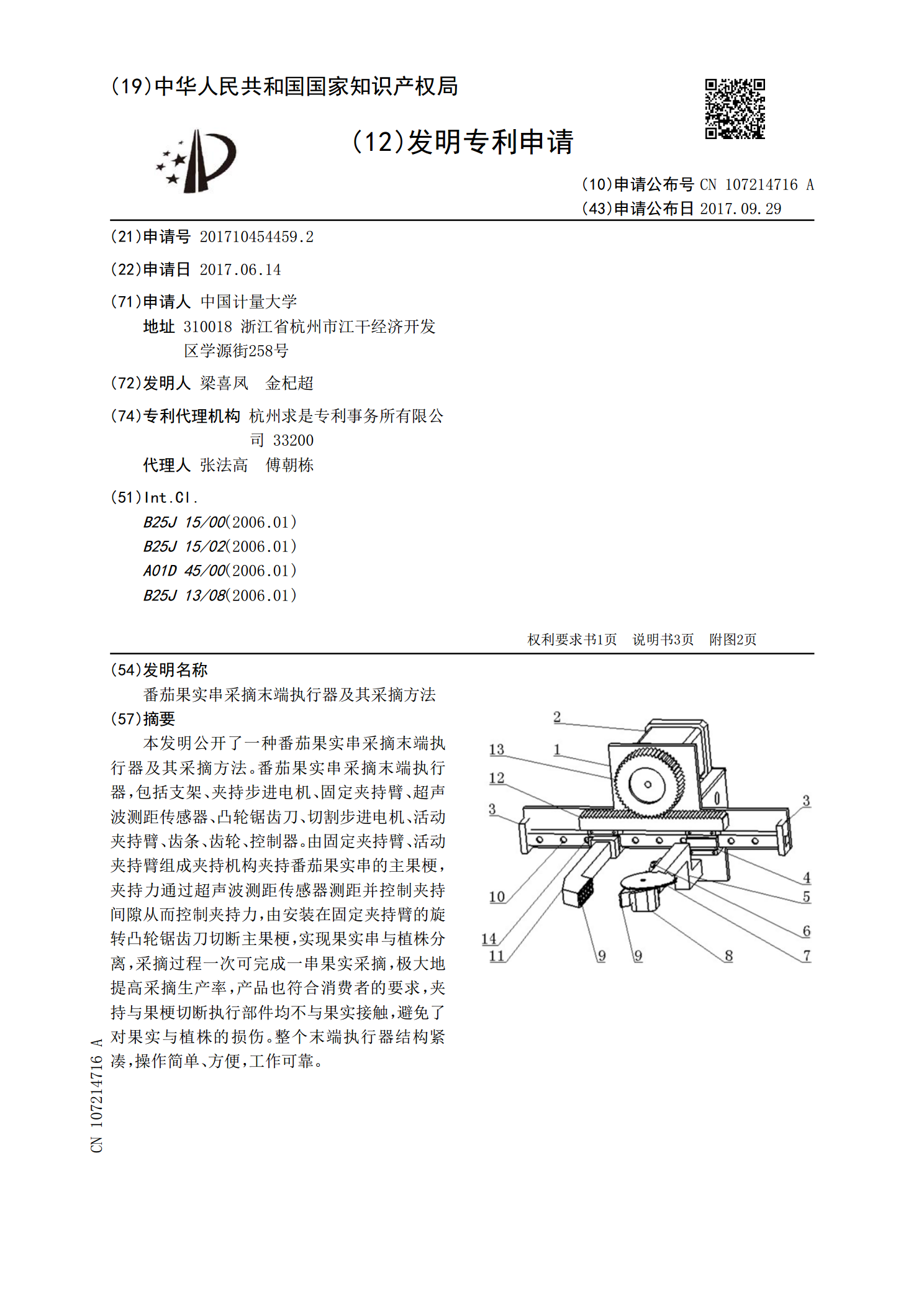
本发明公开了一种番茄果实串采摘末端执行器及其采摘方法。番茄果实串采摘末端执行器,包括支架、夹持步进电机、固定夹持臂、超声波测距传感器、凸轮锯齿刀、切割步进电机、活动夹持臂、齿条、齿轮、控制器。由固定夹持臂、活动夹持臂组成夹持机构夹持番茄果实串的主果梗,夹持力通过超声波测距传感器测距并控制夹持间隙从而控制夹持力,由安装在固定夹持臂的旋转凸轮锯齿刀切断主果梗,实现果实串与植株分离,采摘过程一次可完成一串果实采摘,极大地提高采摘生产率,产品也符合消费者的要求,夹持与果梗切断执行部件均不与果实接触,避免了对果实与

一种山地用果实自动采摘机器人.pdf
本发明涉及一种山地用果实自动采摘机器人,主要包括:山地拖拉机(1)、控制盒(2)、伺服电机(3)(5)(8)、位置传感器(4)(6)(9)、机械臂(7)、机械手(10)、摄像头(11)、红外距离传感器(12)、支撑架(13)、蓄电池(14)等。该山地拖拉机(1)以柴油机为动力机,通过柴油机带动发电机发电,给蓄电池(14)充电,再由蓄电池(14)给机械臂(7)供电。在机械手(10)中间有摄像头(11),可以捕获机械手(10)前方的果实图像,并传给控制盒(2),控制盒(2)将图像处理后,结合红外距离传感器(1

一种果实采摘机器人机械臂.pdf
本发明公开一种果实采摘机器人机械臂。双连杆组成大臂,其关节电机置于U型座上,电机输出轴与大臂直连杆用联轴器连接,大臂曲连杆与U型座用CF轴承铰接,构成大臂转动关节,小臂关节电机固定在曲连杆上,小同步带轮装在该电机输出轴上,双连杆的另一端与关节轴铰接,在关节轴的一端装配大同步带轮,由同步带减速传动带动固定在关节轴上的小臂转动,构成小臂转动关节,在小臂连杆上固定滑轨、齿条和电机,齿轮与齿条传动构成小臂移动关节,滑轨端部铰接舵机构成腕部关节,转盘与电机连接构成旋转关节。本机械臂具有5个自由度,整体刚性强,与果实