
一种管道巡检机器人及控制方法.pdf

东耀****哥哥

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种管道巡检机器人的控制方法.pdf
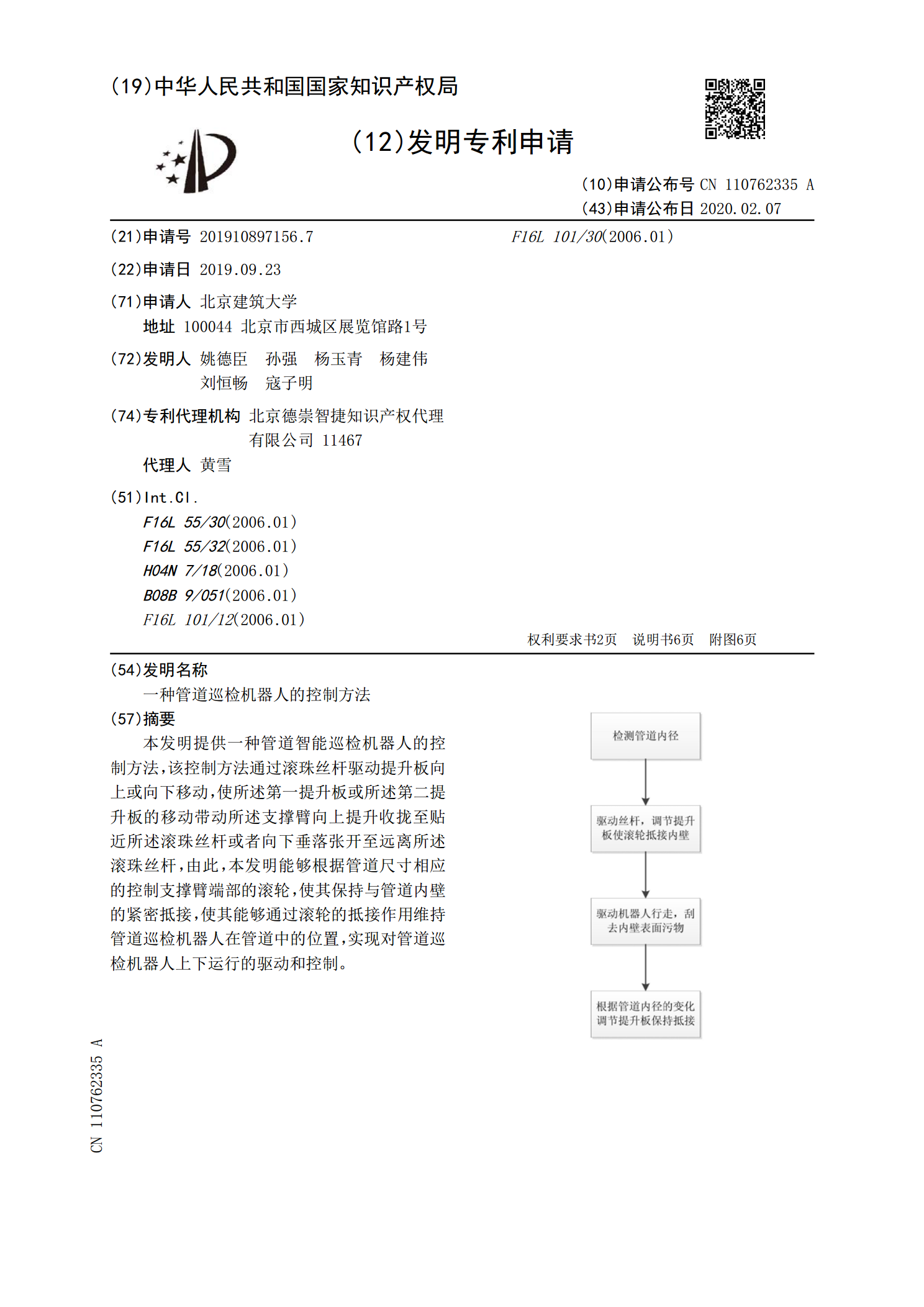
本发明提供一种管道智能巡检机器人的控制方法,该控制方法通过滚珠丝杆驱动提升板向上或向下移动,使所述第一提升板或所述第二提升板的移动带动所述支撑臂向上提升收拢至贴近所述滚珠丝杆或者向下垂落张开至远离所述滚珠丝杆,由此,本发明能够根据管道尺寸相应的控制支撑臂端部的滚轮,使其保持与管道内壁的紧密抵接,使其能够通过滚轮的抵接作用维持管道巡检机器人在管道中的位置,实现对管道巡检机器人上下运行的驱动和控制。
一种管道巡检机器人及控制方法.pdf
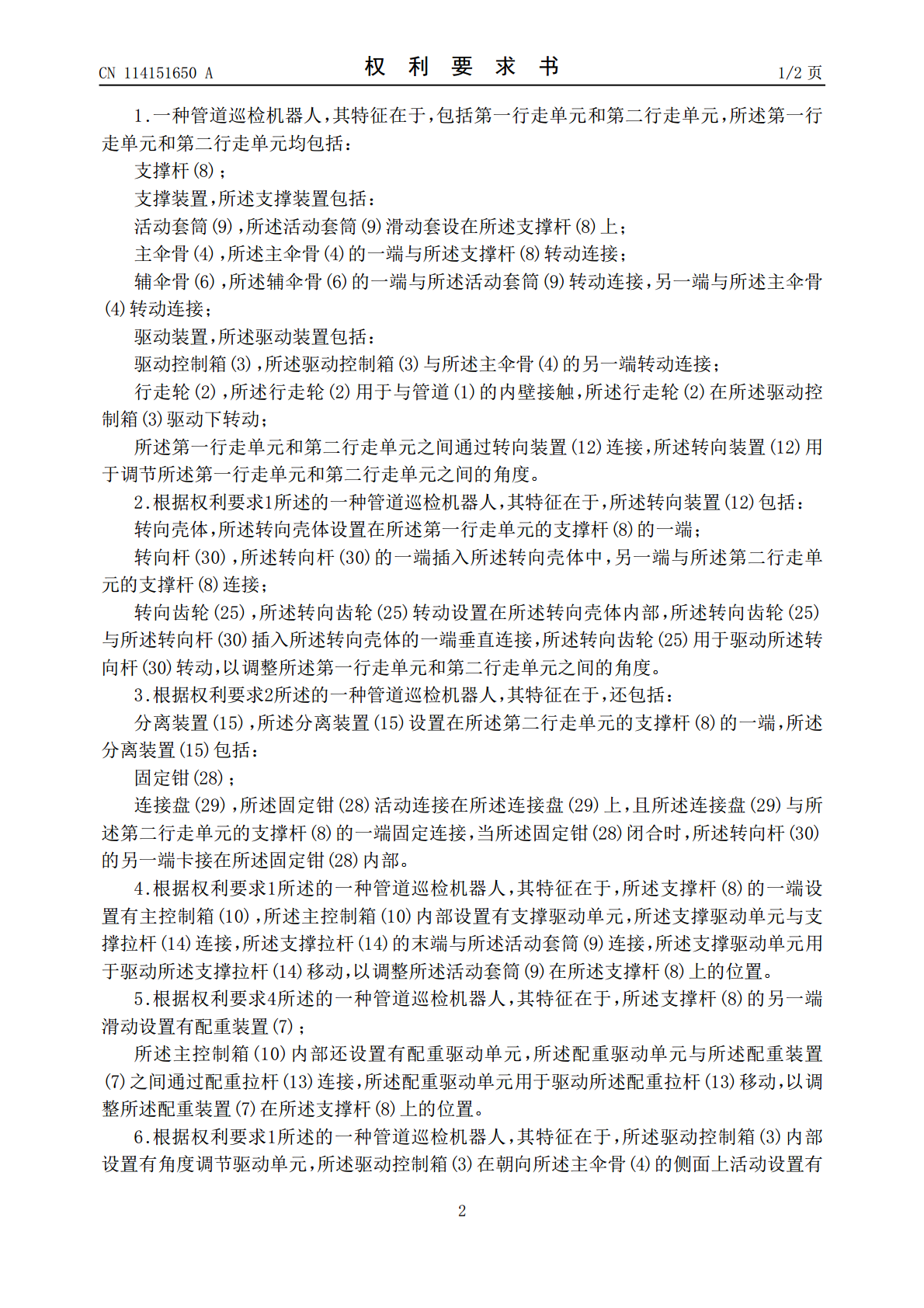
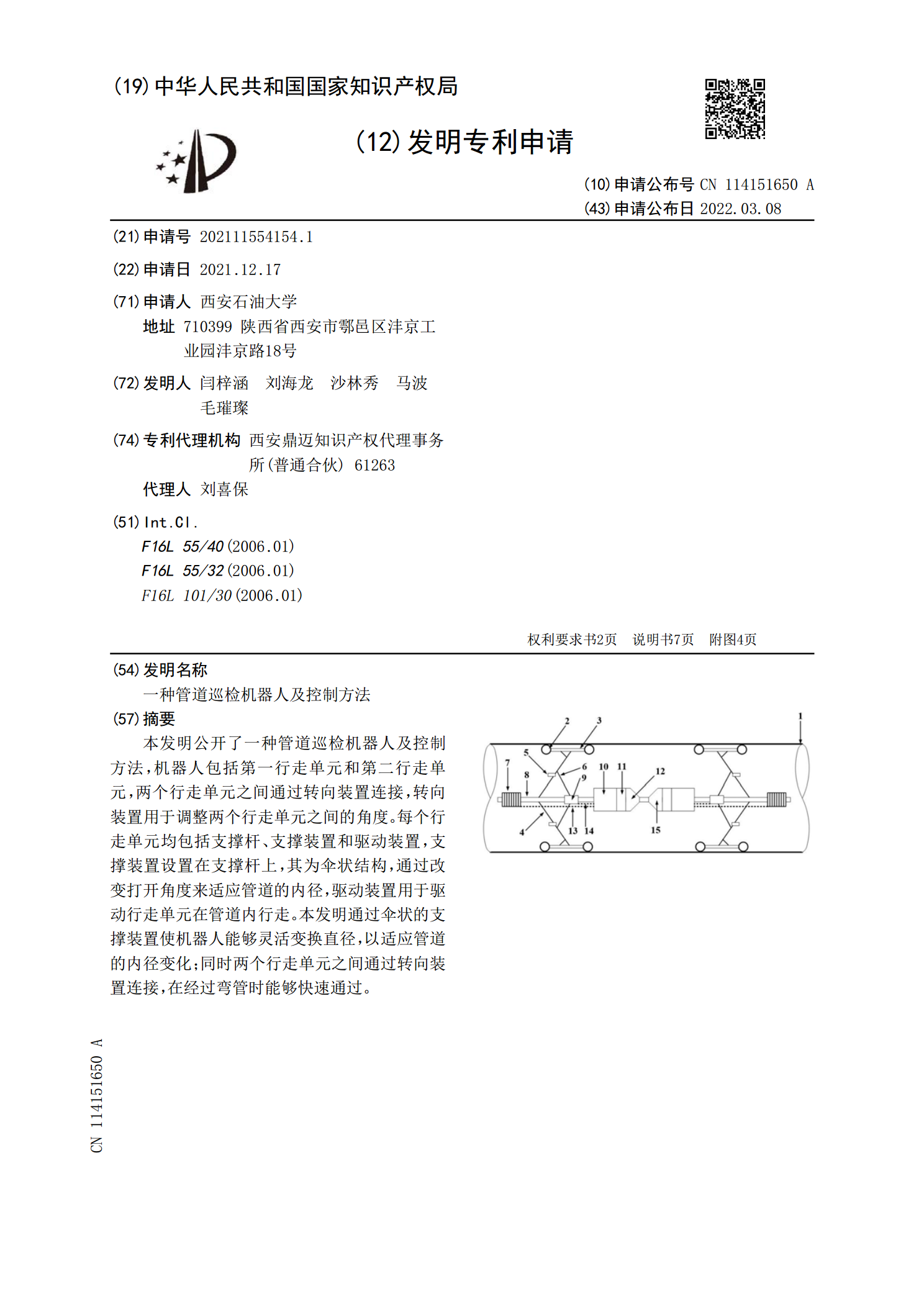
本发明公开了一种管道巡检机器人及控制方法,机器人包括第一行走单元和第二行走单元,两个行走单元之间通过转向装置连接,转向装置用于调整两个行走单元之间的角度。每个行走单元均包括支撑杆、支撑装置和驱动装置,支撑装置设置在支撑杆上,其为伞状结构,通过改变打开角度来适应管道的内径,驱动装置用于驱动行走单元在管道内行走。本发明通过伞状的支撑装置使机器人能够灵活变换直径,以适应管道的内径变化;同时两个行走单元之间通过转向装置连接,在经过弯管时能够快速通过。
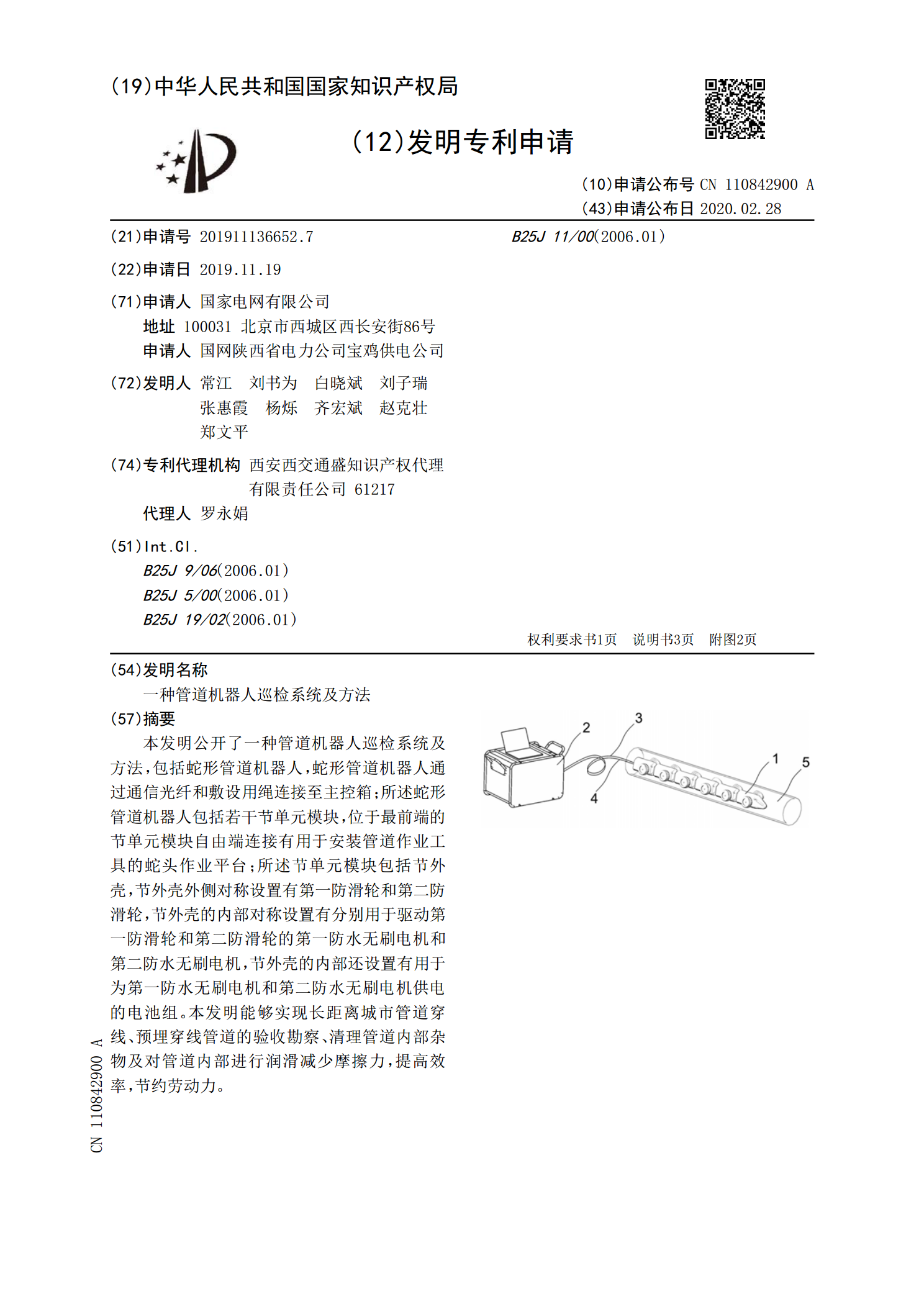
一种管道机器人巡检系统及方法.pdf
本发明公开了一种管道机器人巡检系统及方法,包括蛇形管道机器人,蛇形管道机器人通过通信光纤和敷设用绳连接至主控箱;所述蛇形管道机器人包括若干节单元模块,位于最前端的节单元模块自由端连接有用于安装管道作业工具的蛇头作业平台;所述节单元模块包括节外壳,节外壳外侧对称设置有第一防滑轮和第二防滑轮,节外壳的内部对称设置有分别用于驱动第一防滑轮和第二防滑轮的第一防水无刷电机和第二防水无刷电机,节外壳的内部还设置有用于为第一防水无刷电机和第二防水无刷电机供电的电池组。本发明能够实现长距离城市管道穿线、预埋穿线管道的验收
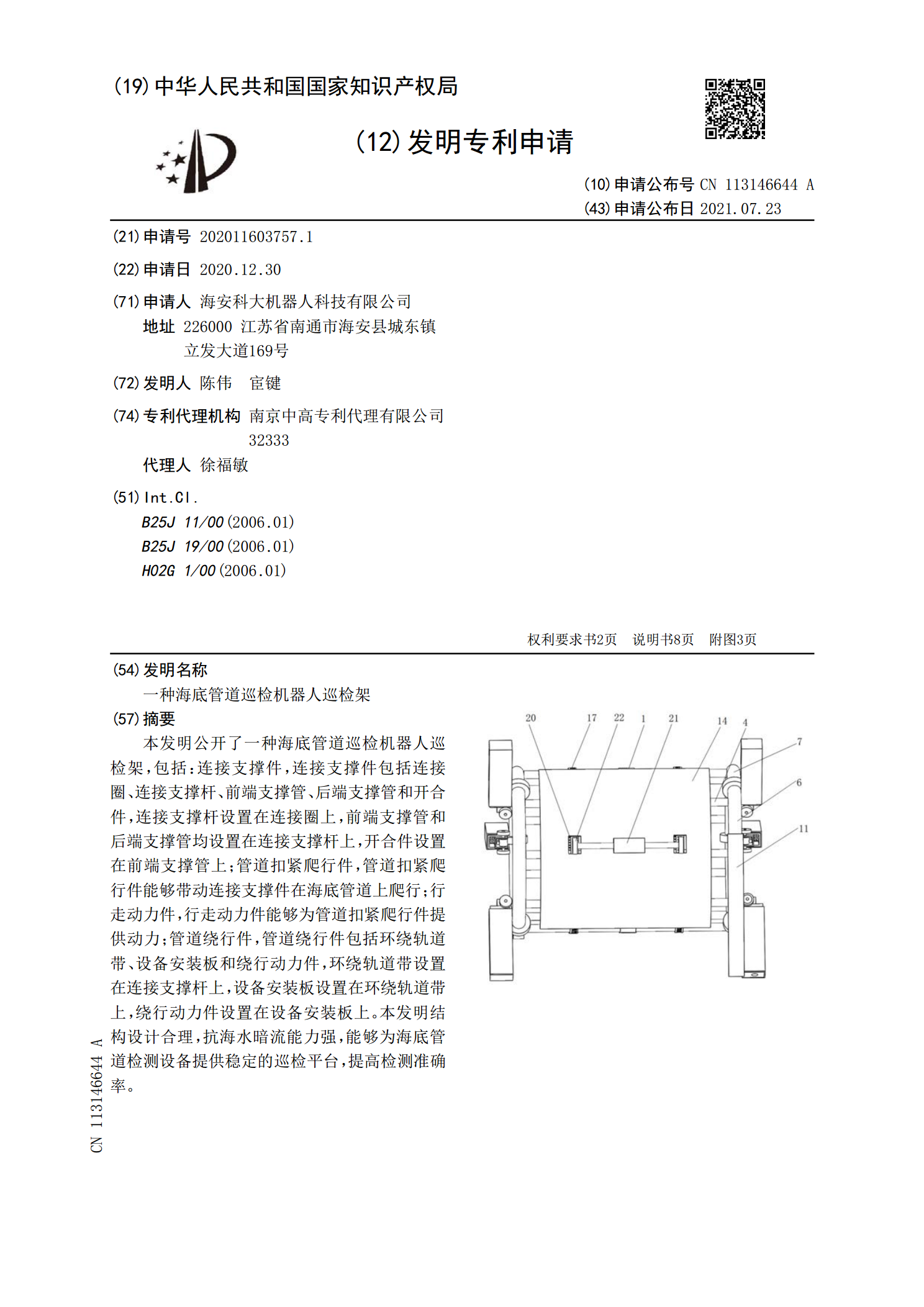
一种海底管道巡检机器人巡检架.pdf
本发明公开了一种海底管道巡检机器人巡检架,包括:连接支撑件,连接支撑件包括连接圈、连接支撑杆、前端支撑管、后端支撑管和开合件,连接支撑杆设置在连接圈上,前端支撑管和后端支撑管均设置在连接支撑杆上,开合件设置在前端支撑管上;管道扣紧爬行件,管道扣紧爬行件能够带动连接支撑件在海底管道上爬行;行走动力件,行走动力件能够为管道扣紧爬行件提供动力;管道绕行件,管道绕行件包括环绕轨道带、设备安装板和绕行动力件,环绕轨道带设置在连接支撑杆上,设备安装板设置在环绕轨道带上,绕行动力件设置在设备安装板上。本发明结构设计合理
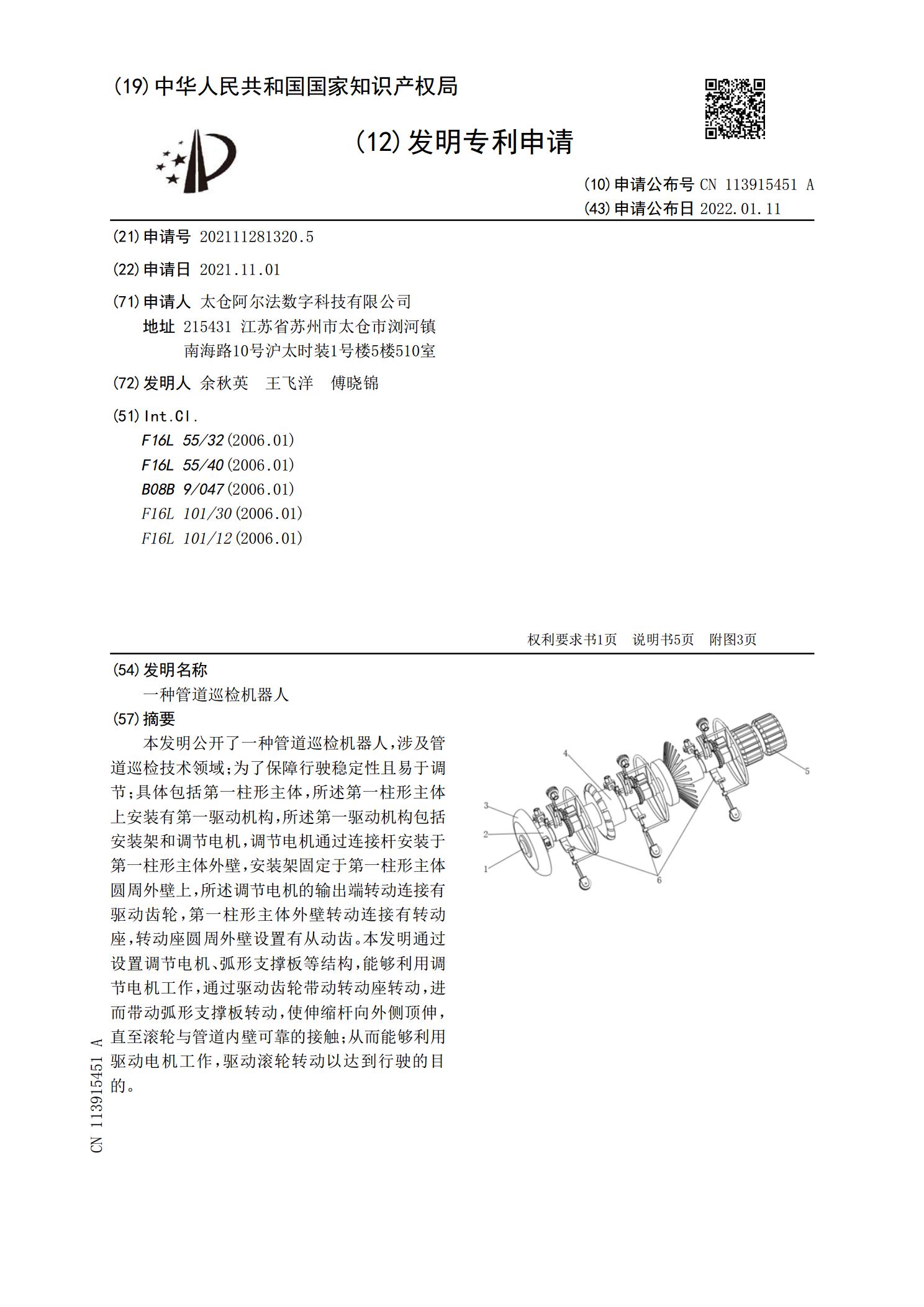
一种管道巡检机器人.pdf
本发明公开了一种管道巡检机器人,涉及管道巡检技术领域;为了保障行驶稳定性且易于调节;具体包括第一柱形主体,所述第一柱形主体上安装有第一驱动机构,所述第一驱动机构包括安装架和调节电机,调节电机通过连接杆安装于第一柱形主体外壁,安装架固定于第一柱形主体圆周外壁上,所述调节电机的输出端转动连接有驱动齿轮,第一柱形主体外壁转动连接有转动座,转动座圆周外壁设置有从动齿。本发明通过设置调节电机、弧形支撑板等结构,能够利用调节电机工作,通过驱动齿轮带动转动座转动,进而带动弧形支撑板转动,使伸缩杆向外侧顶伸,直至滚轮与管