
一种上肢康复训练机器人.pdf

努力****妙风

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种上肢康复训练机器人.pdf
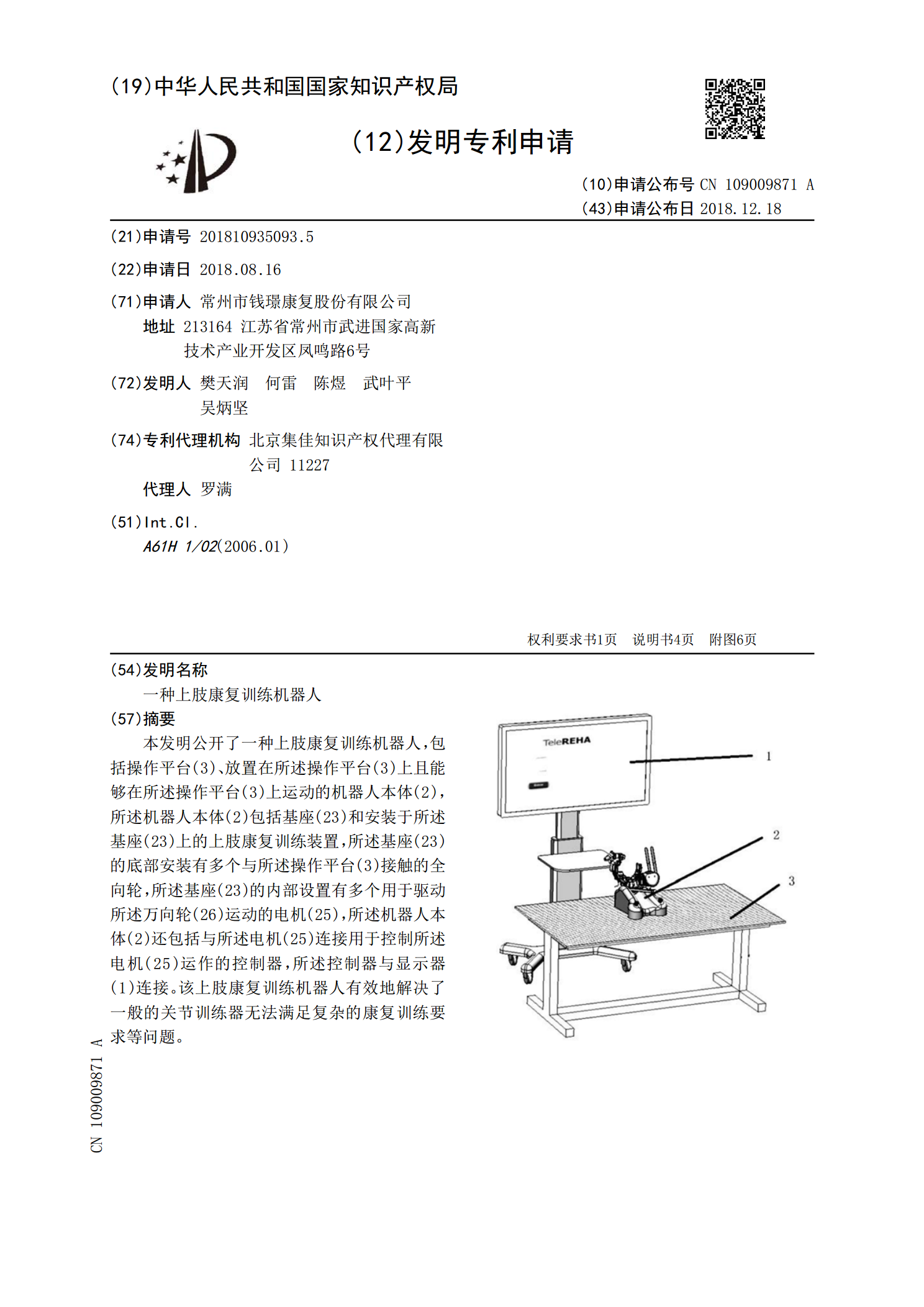
本发明公开了一种上肢康复训练机器人,包括操作平台(3)、放置在所述操作平台(3)上且能够在所述操作平台(3)上运动的机器人本体(2),所述机器人本体(2)包括基座(23)和安装于所述基座(23)上的上肢康复训练装置,所述基座(23)的底部安装有多个与所述操作平台(3)接触的全向轮,所述基座(23)的内部设置有多个用于驱动所述万向轮(26)运动的电机(25),所述机器人本体(2)还包括与所述电机(25)连接用于控制所述电机(25)运作的控制器,所述控制器与显示器(1)连接。该上肢康复训练机器人有效地解决了一
一种上肢康复训练机器人.pdf
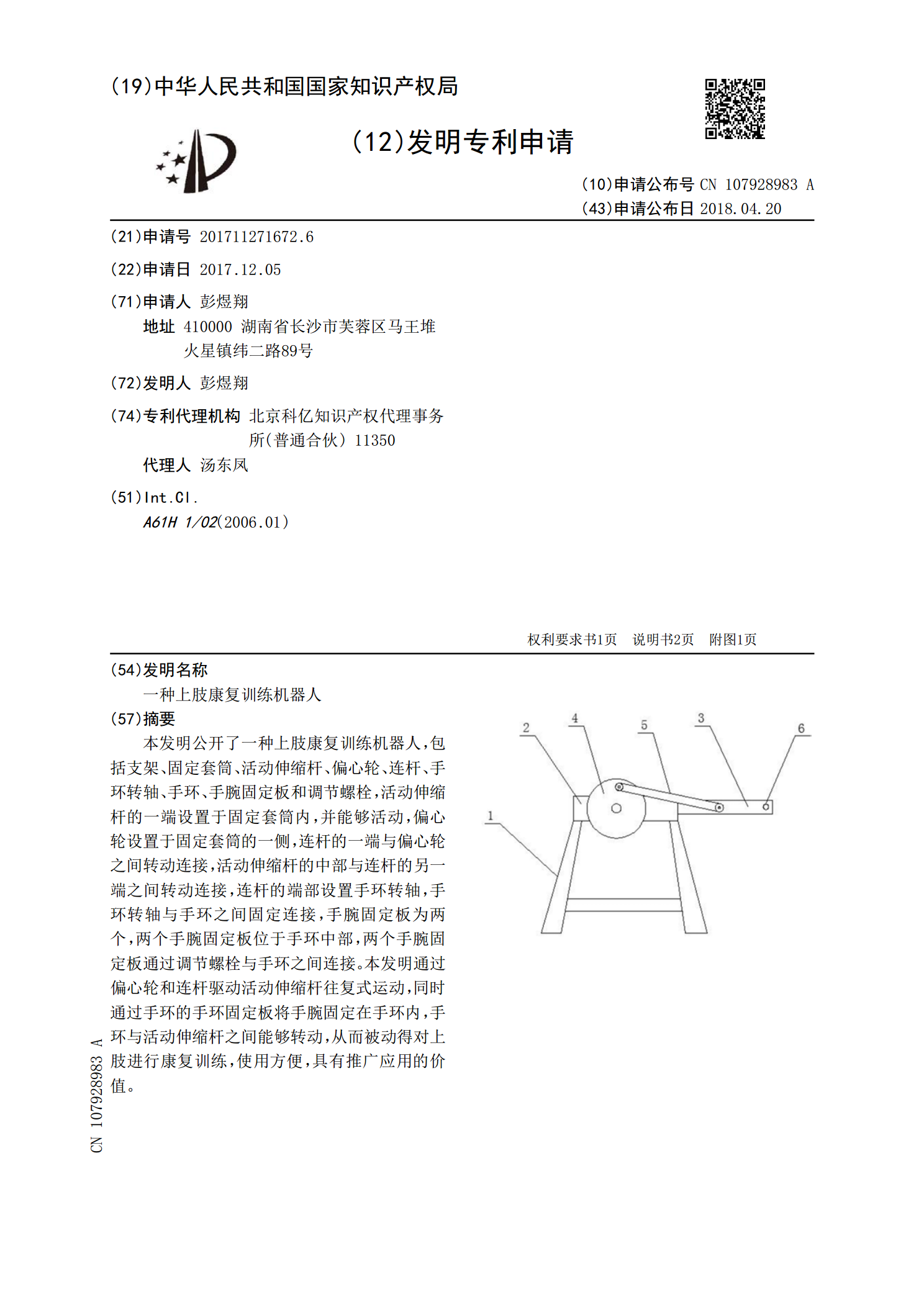
本发明公开了一种上肢康复训练机器人,包括支架、固定套筒、活动伸缩杆、偏心轮、连杆、手环转轴、手环、手腕固定板和调节螺栓,活动伸缩杆的一端设置于固定套筒内,并能够活动,偏心轮设置于固定套筒的一侧,连杆的一端与偏心轮之间转动连接,活动伸缩杆的中部与连杆的另一端之间转动连接,连杆的端部设置手环转轴,手环转轴与手环之间固定连接,手腕固定板为两个,两个手腕固定板位于手环中部,两个手腕固定板通过调节螺栓与手环之间连接。本发明通过偏心轮和连杆驱动活动伸缩杆往复式运动,同时通过手环的手环固定板将手腕固定在手环内,手环与活
一种上肢康复训练机器人.pdf
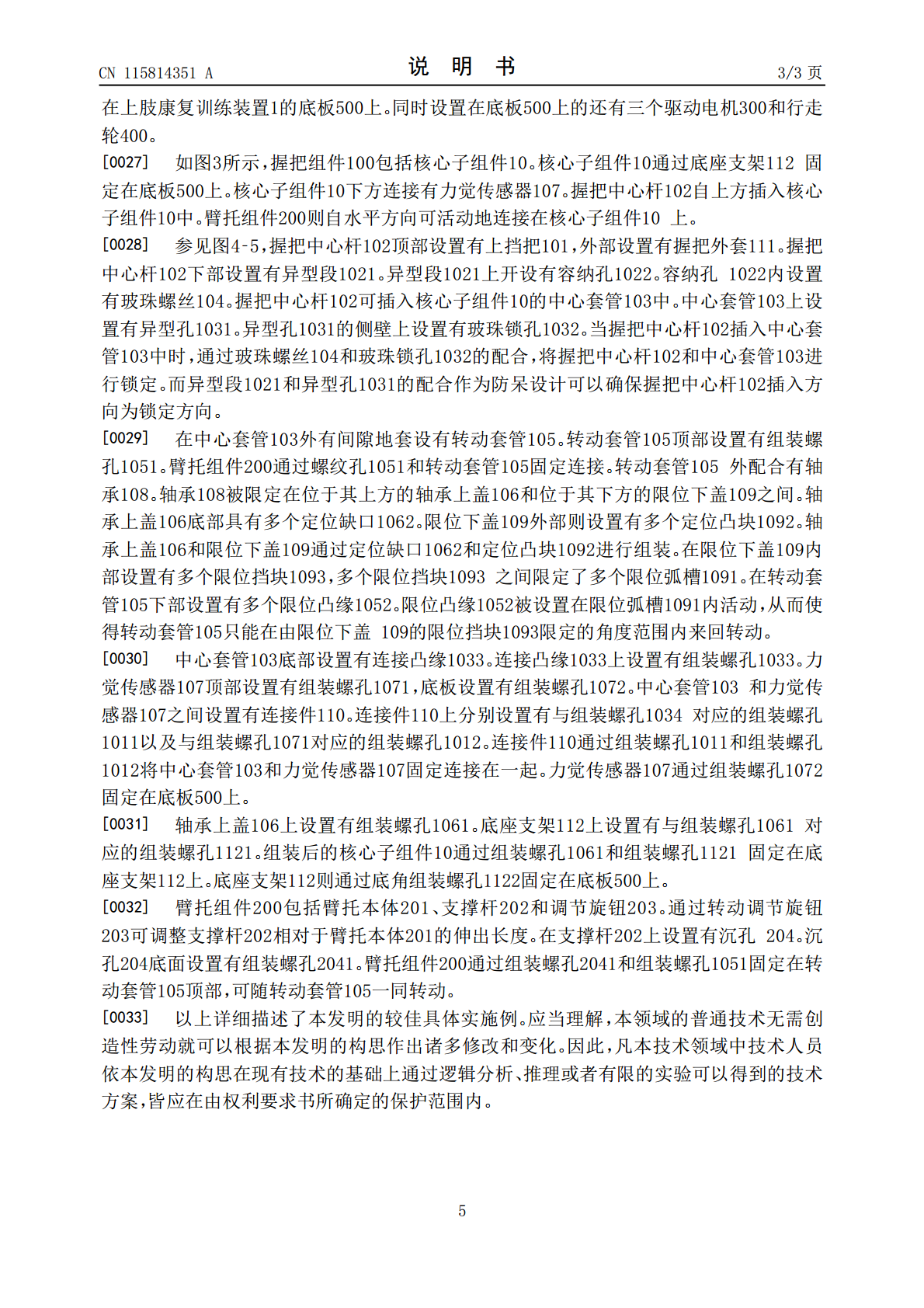
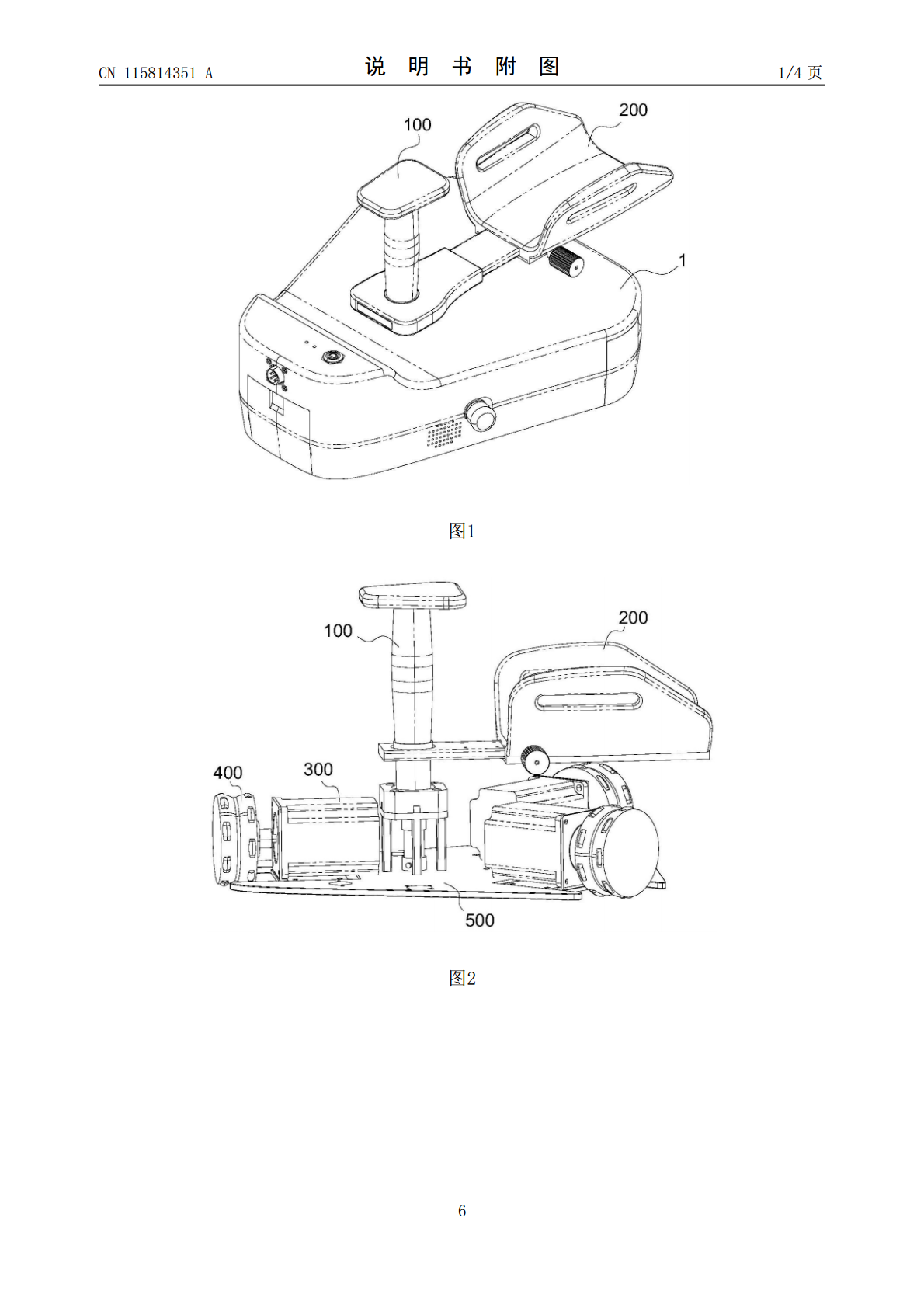
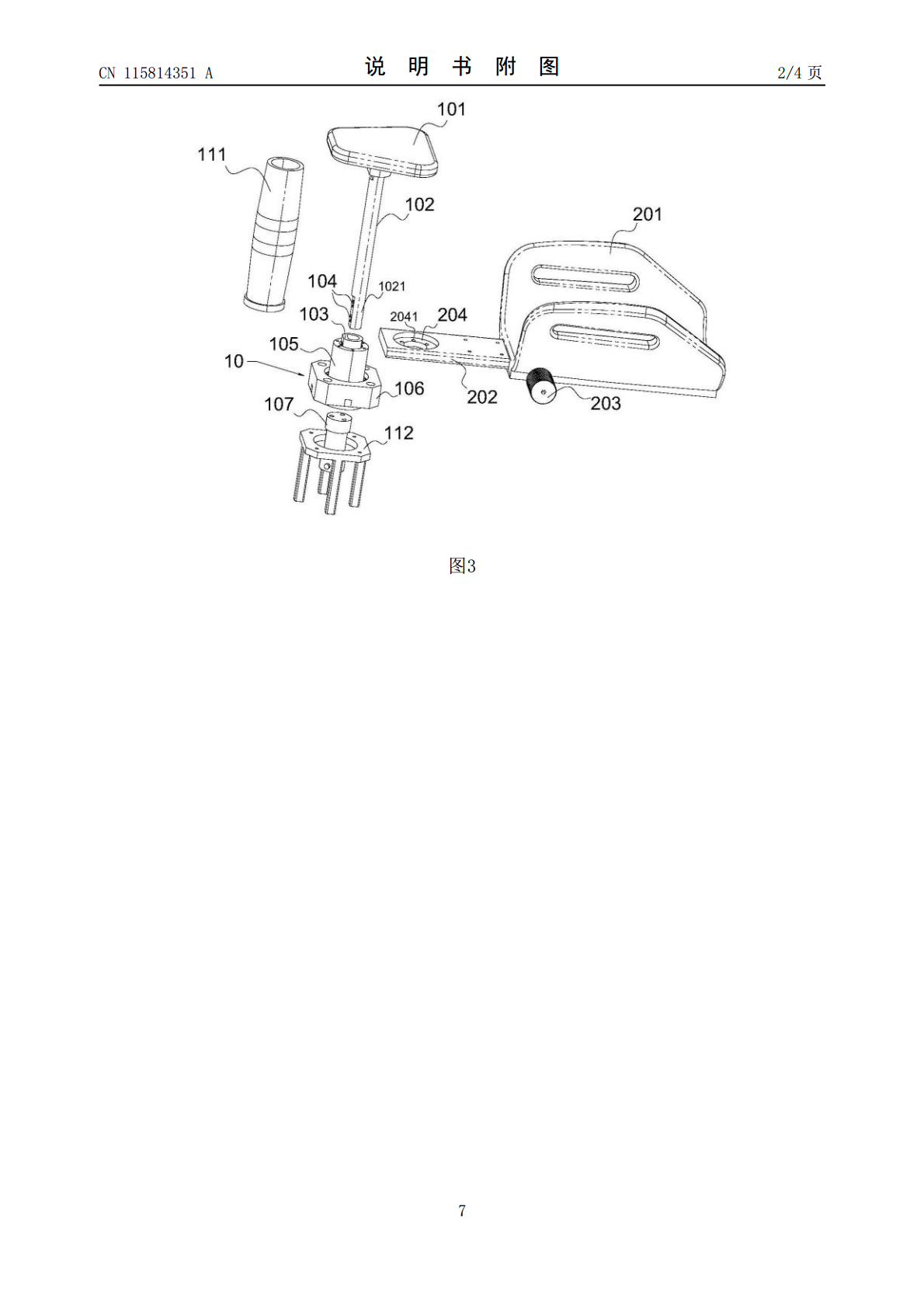
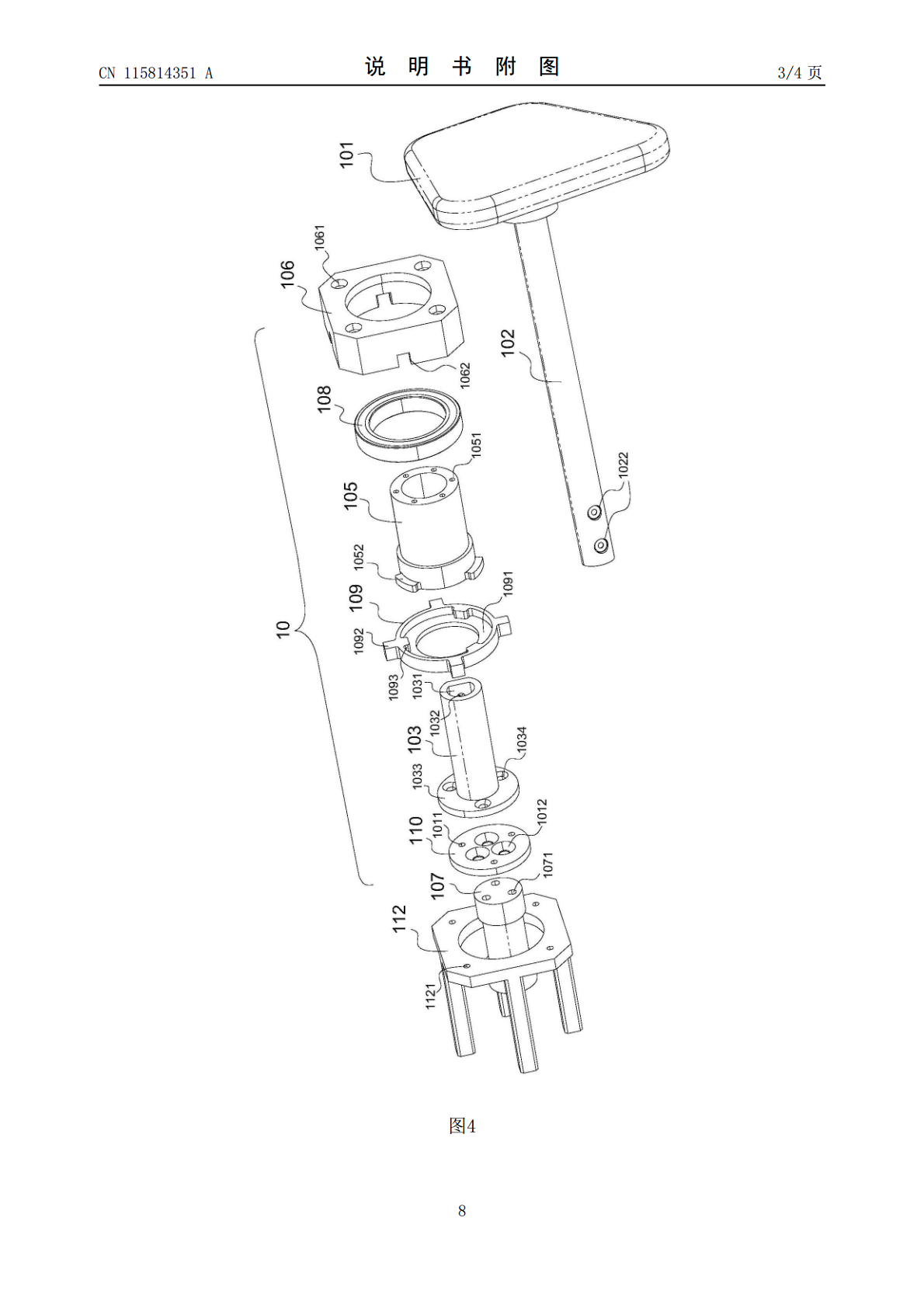
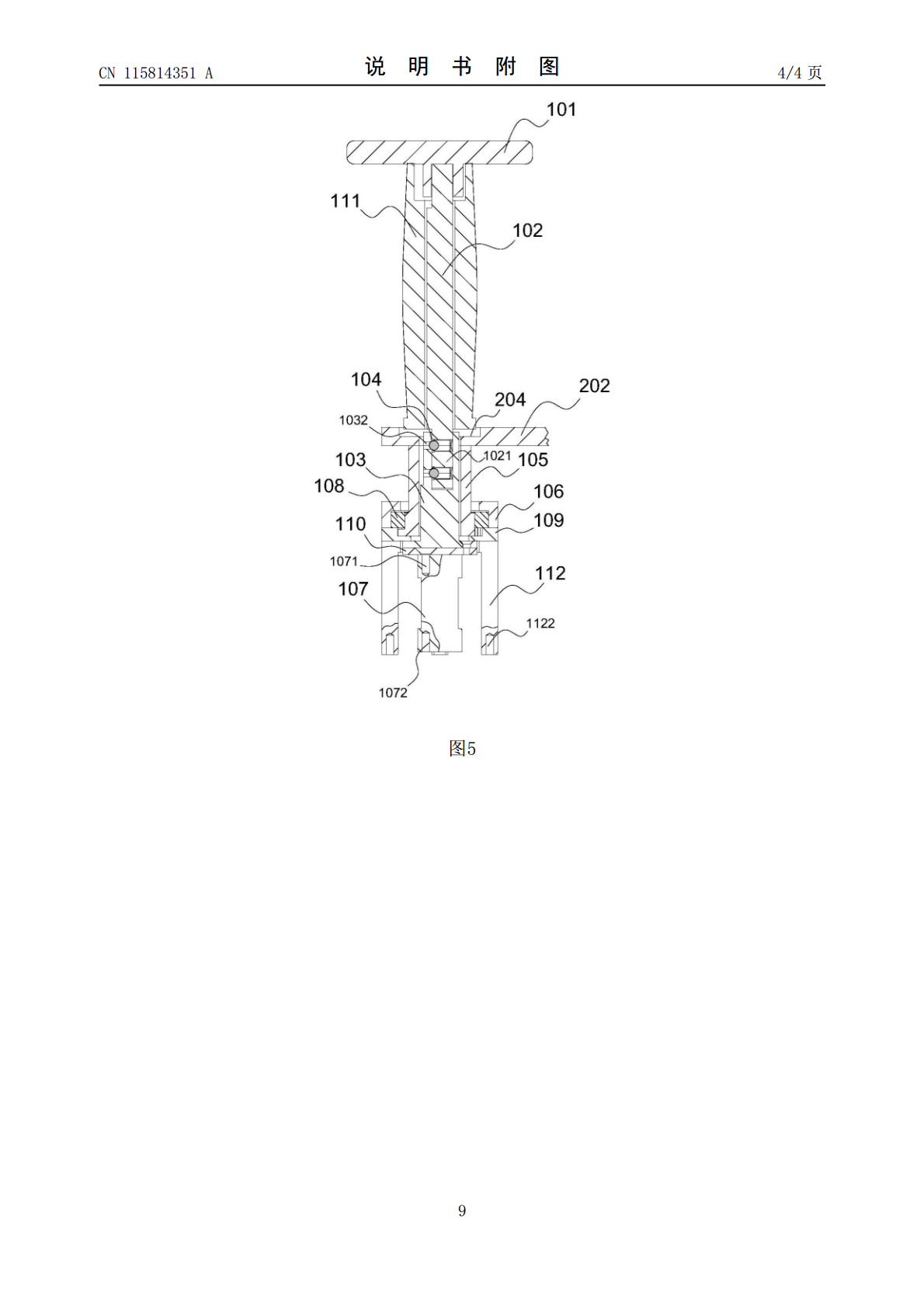
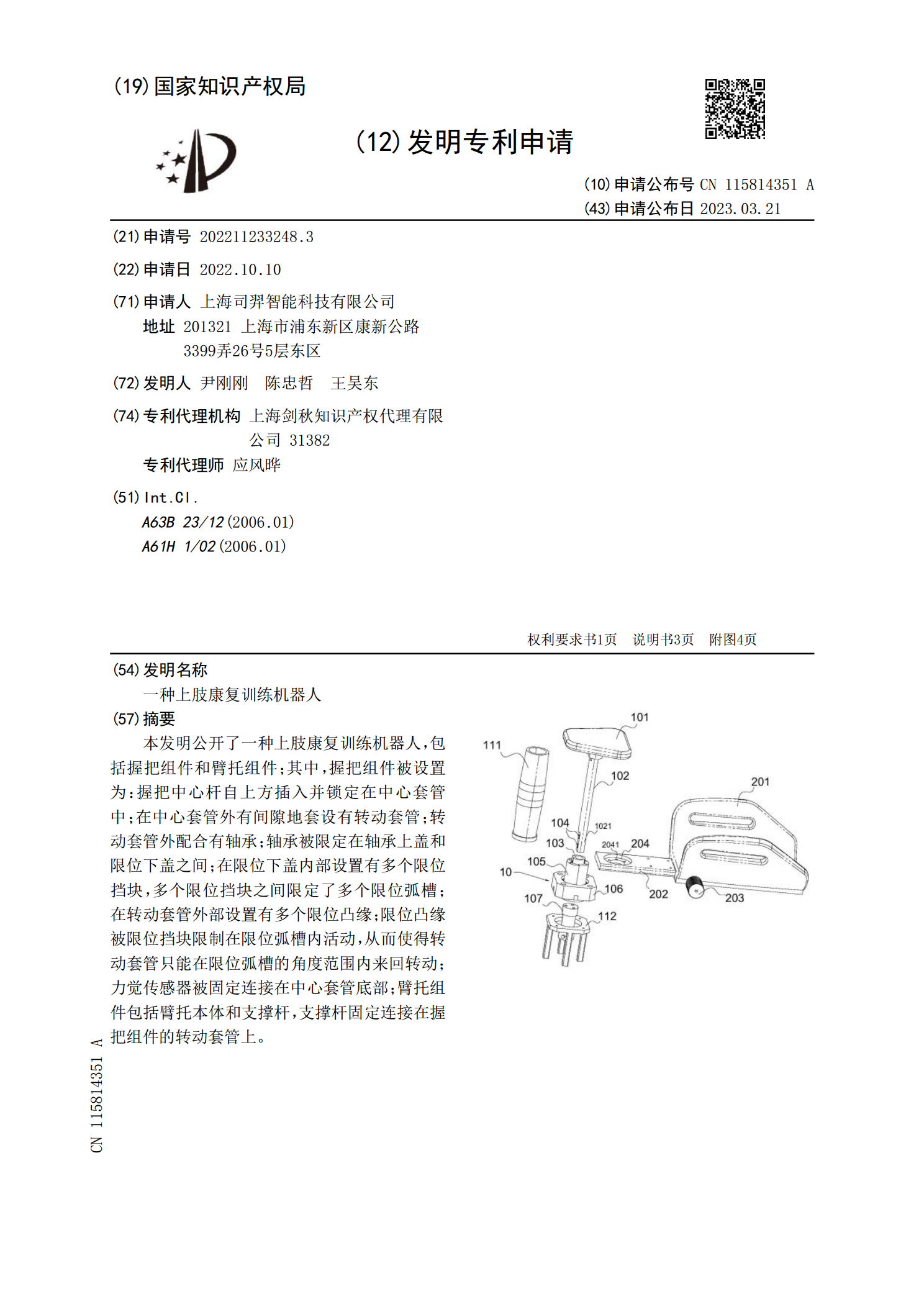
本发明公开了一种上肢康复训练机器人,包括握把组件和臂托组件;其中,握把组件被设置为:握把中心杆自上方插入并锁定在中心套管中;在中心套管外有间隙地套设有转动套管;转动套管外配合有轴承;轴承被限定在轴承上盖和限位下盖之间;在限位下盖内部设置有多个限位挡块,多个限位挡块之间限定了多个限位弧槽;在转动套管外部设置有多个限位凸缘;限位凸缘被限位挡块限制在限位弧槽内活动,从而使得转动套管只能在限位弧槽的角度范围内来回转动;力觉传感器被固定连接在中心套管底部;臂托组件包括臂托本体和支撑杆,支撑杆固定连接在握把组件的转动
一种上肢康复训练机器人.pdf
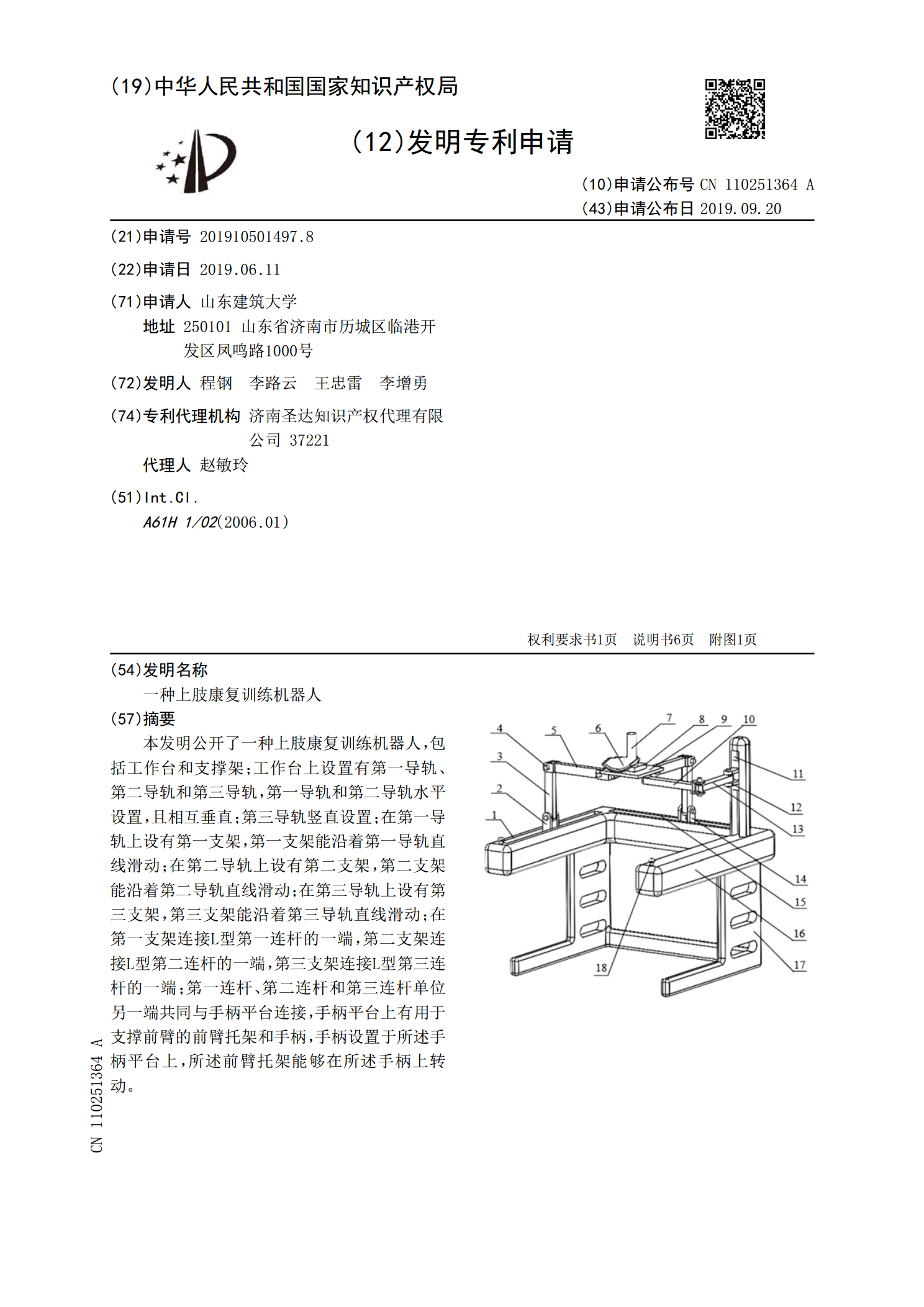
本发明公开了一种上肢康复训练机器人,包括工作台和支撑架;工作台上设置有第一导轨、第二导轨和第三导轨,第一导轨和第二导轨水平设置,且相互垂直;第三导轨竖直设置;在第一导轨上设有第一支架,第一支架能沿着第一导轨直线滑动;在第二导轨上设有第二支架,第二支架能沿着第二导轨直线滑动;在第三导轨上设有第三支架,第三支架能沿着第三导轨直线滑动;在第一支架连接L型第一连杆的一端,第二支架连接L型第二连杆的一端,第三支架连接L型第三连杆的一端;第一连杆、第二连杆和第三连杆单位另一端共同与手柄平台连接,手柄平台上有用于支撑前
一种上肢康复训练机器人.pdf
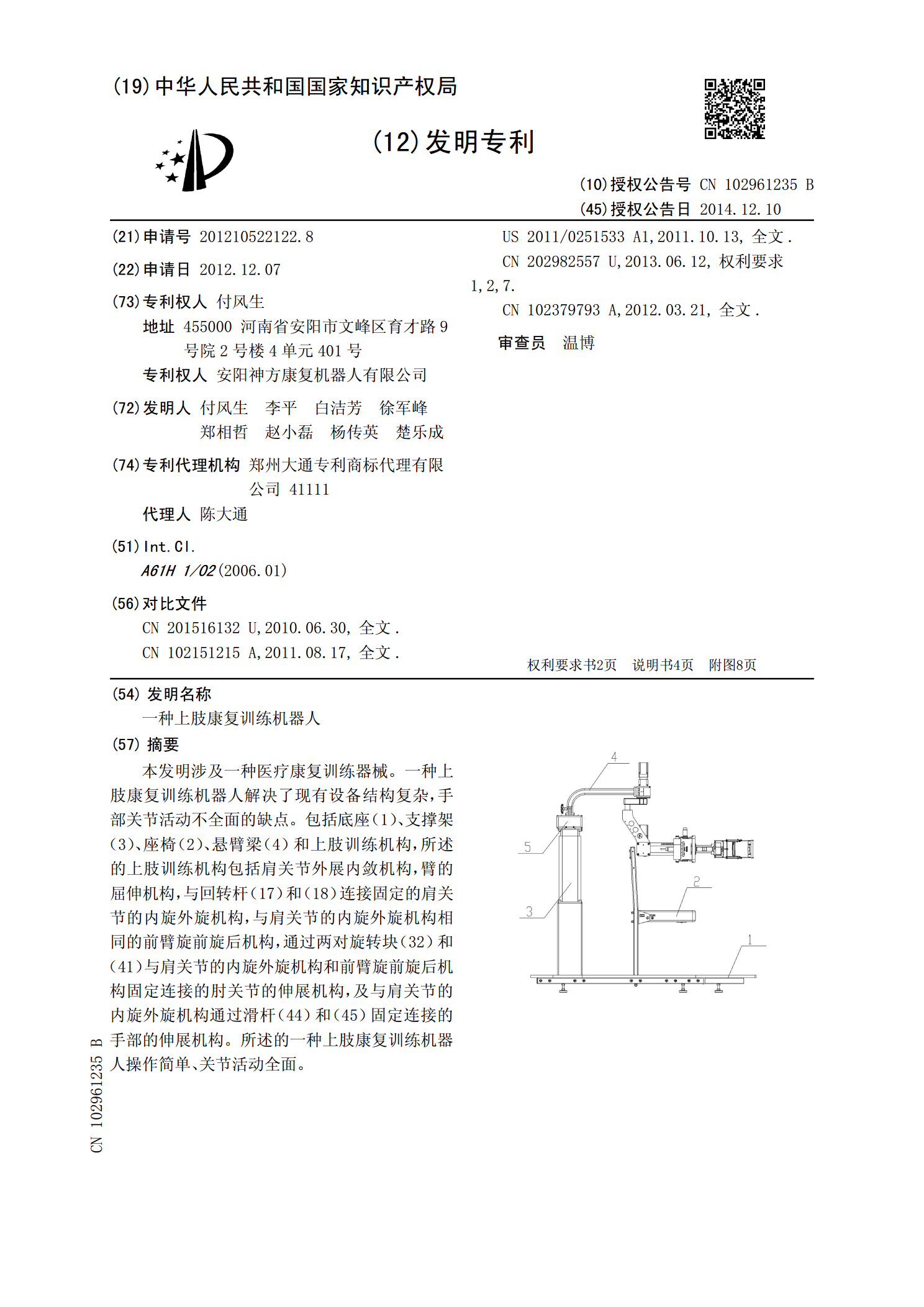
本发明涉及一种医疗康复训练器械。一种上肢康复训练机器人解决了现有设备结构复杂,手部关节活动不全面的缺点。包括底座(1)、支撑架(3)、座椅(2)、悬臂梁(4)和上肢训练机构,所述的上肢训练机构包括肩关节外展内敛机构,臂的屈伸机构,与回转杆(17)和(18)连接固定的肩关节的内旋外旋机构,与肩关节的内旋外旋机构相同的前臂旋前旋后机构,通过两对旋转块(32)和(41)与肩关节的内旋外旋机构和前臂旋前旋后机构固定连接的肘关节的伸展机构,及与肩关节的内旋外旋机构通过滑杆(44)和(45)固定连接的手部的伸展机构。