
一种下肢外骨骼康复训练机器人.pdf

猫巷****志敏

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种下肢外骨骼康复训练机器人.pdf
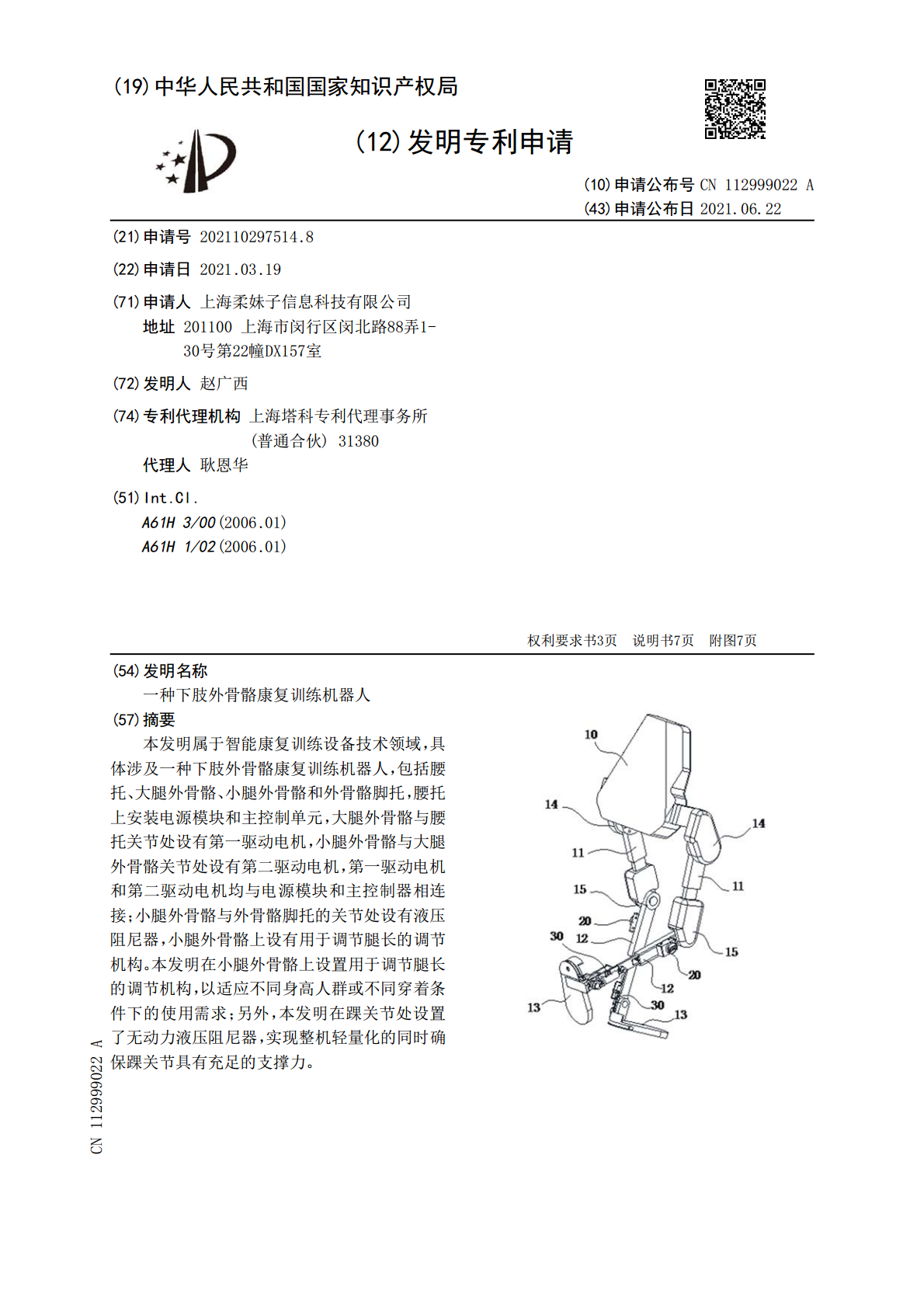
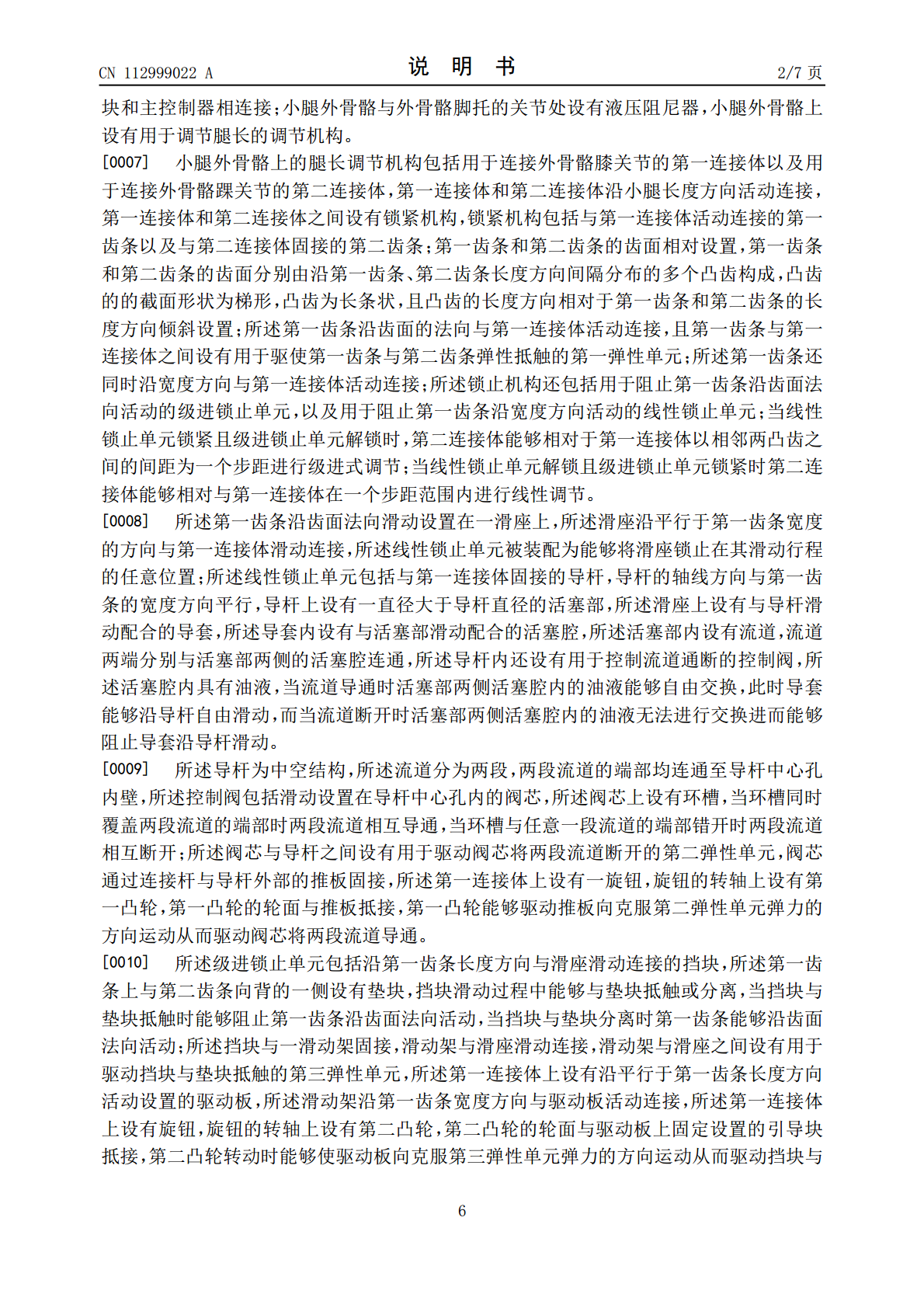
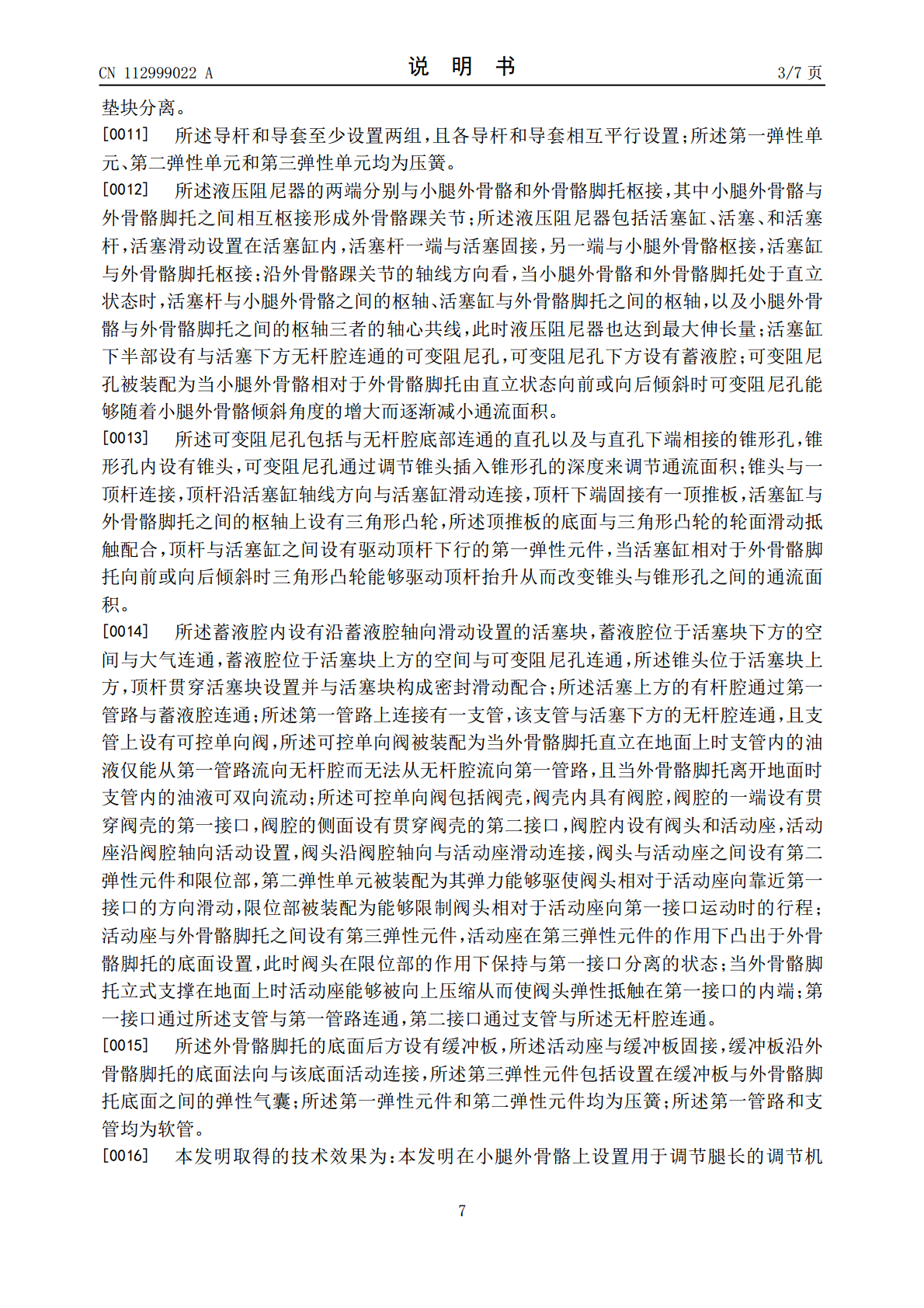
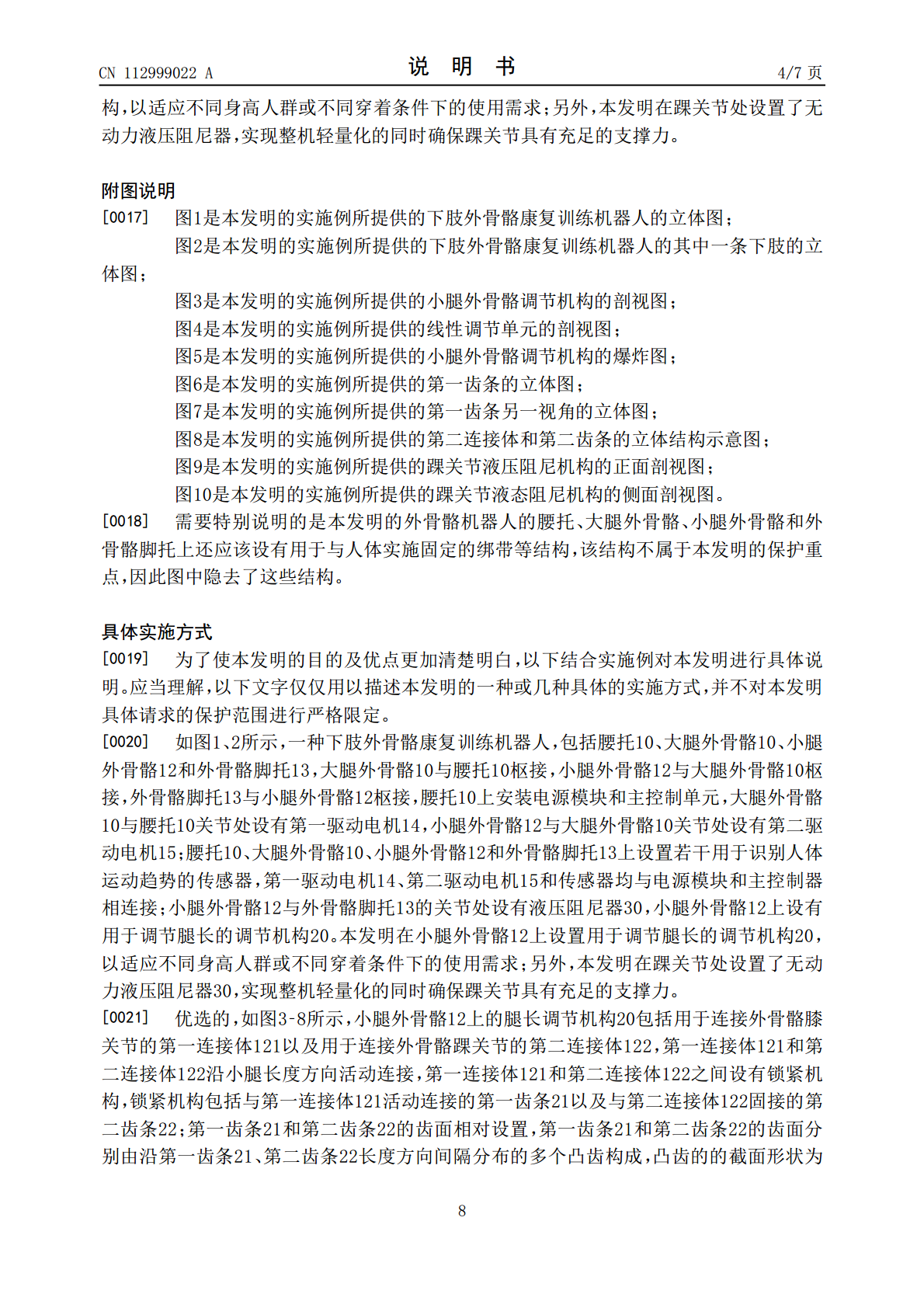
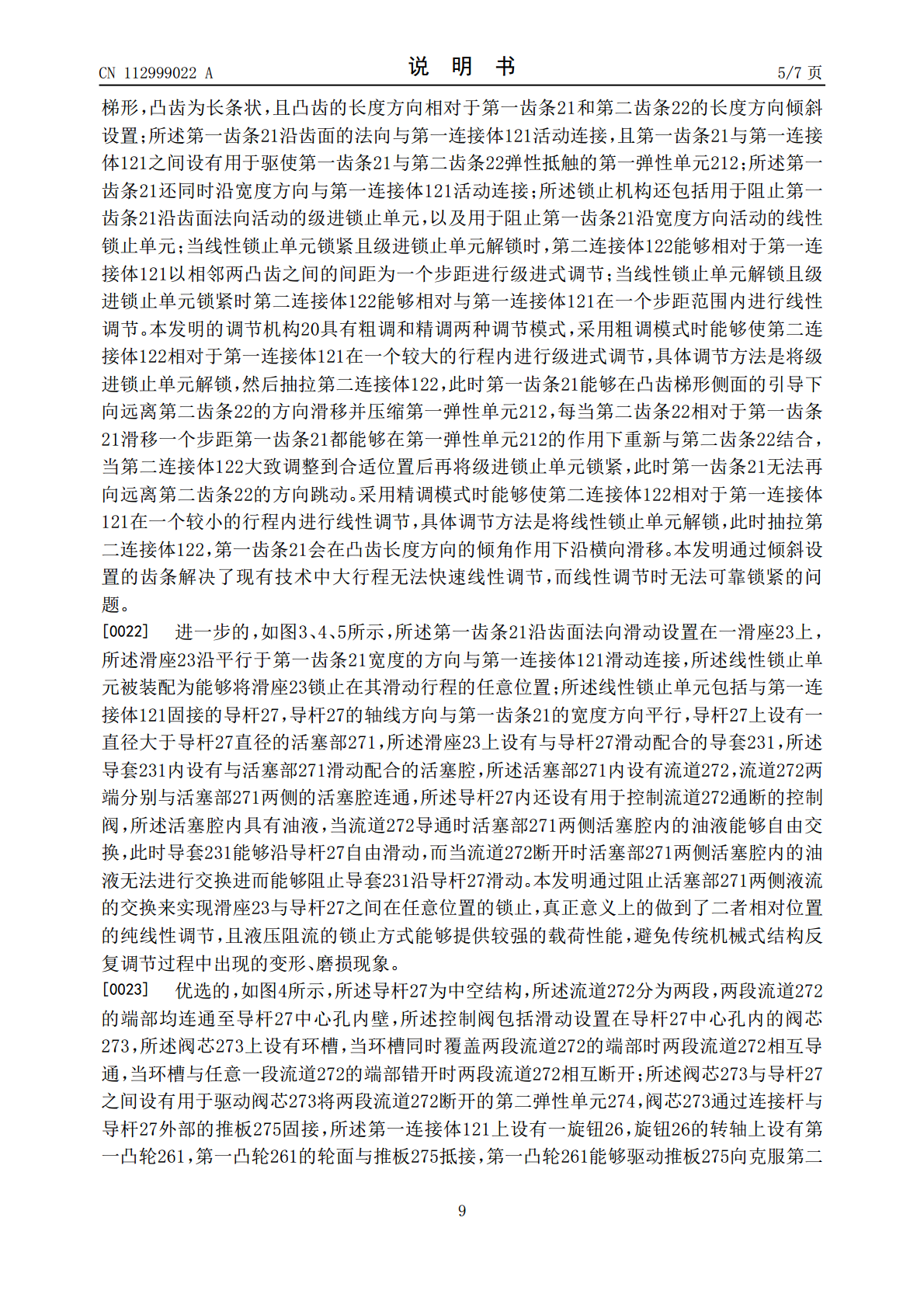
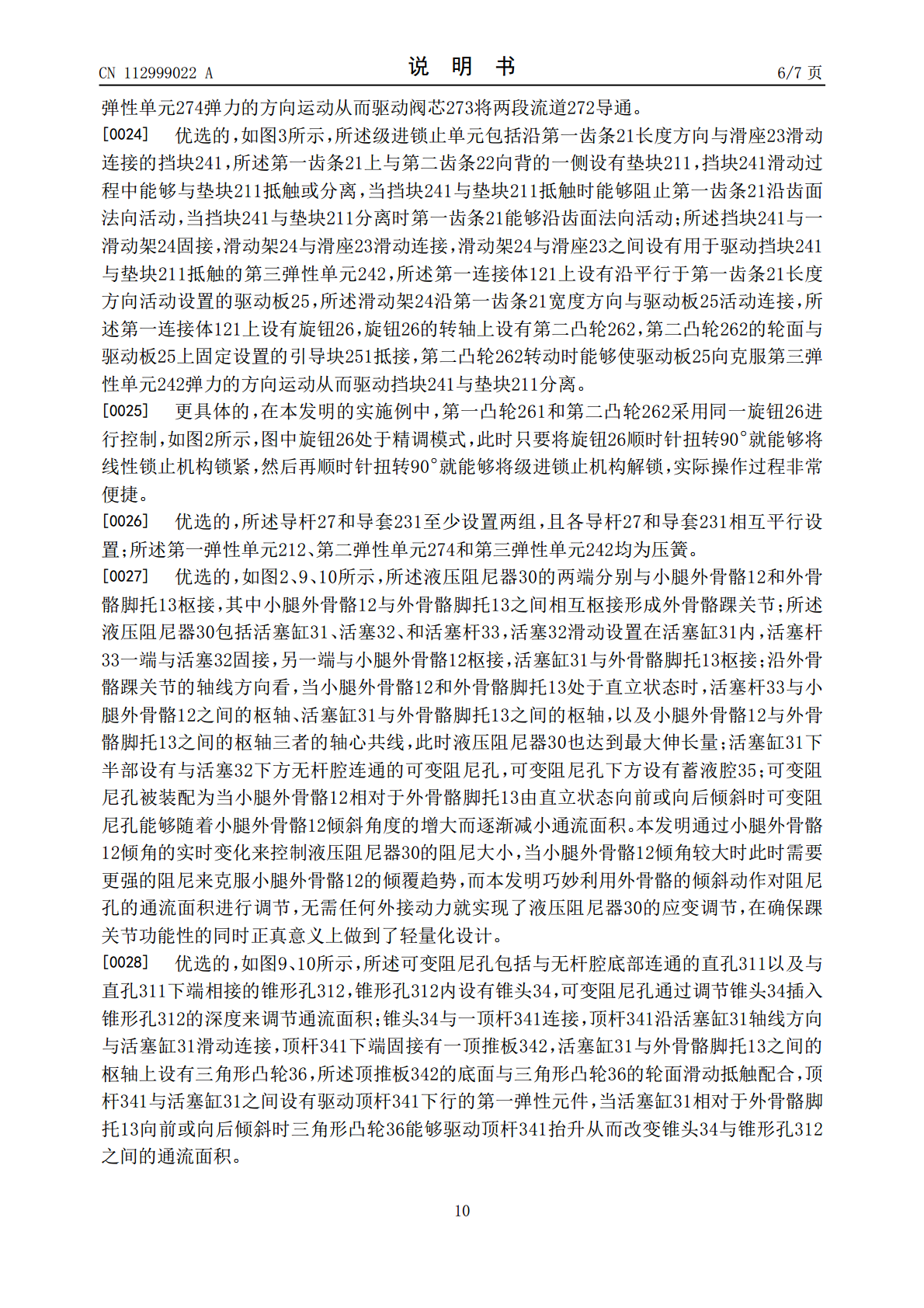
本发明属于智能康复训练设备技术领域,具体涉及一种下肢外骨骼康复训练机器人,包括腰托、大腿外骨骼、小腿外骨骼和外骨骼脚托,腰托上安装电源模块和主控制单元,大腿外骨骼与腰托关节处设有第一驱动电机,小腿外骨骼与大腿外骨骼关节处设有第二驱动电机,第一驱动电机和第二驱动电机均与电源模块和主控制器相连接;小腿外骨骼与外骨骼脚托的关节处设有液压阻尼器,小腿外骨骼上设有用于调节腿长的调节机构。本发明在小腿外骨骼上设置用于调节腿长的调节机构,以适应不同身高人群或不同穿着条件下的使用需求;另外,本发明在踝关节处设置了无动力液
一种下肢康复训练外骨骼机器人及其控制方法.pdf
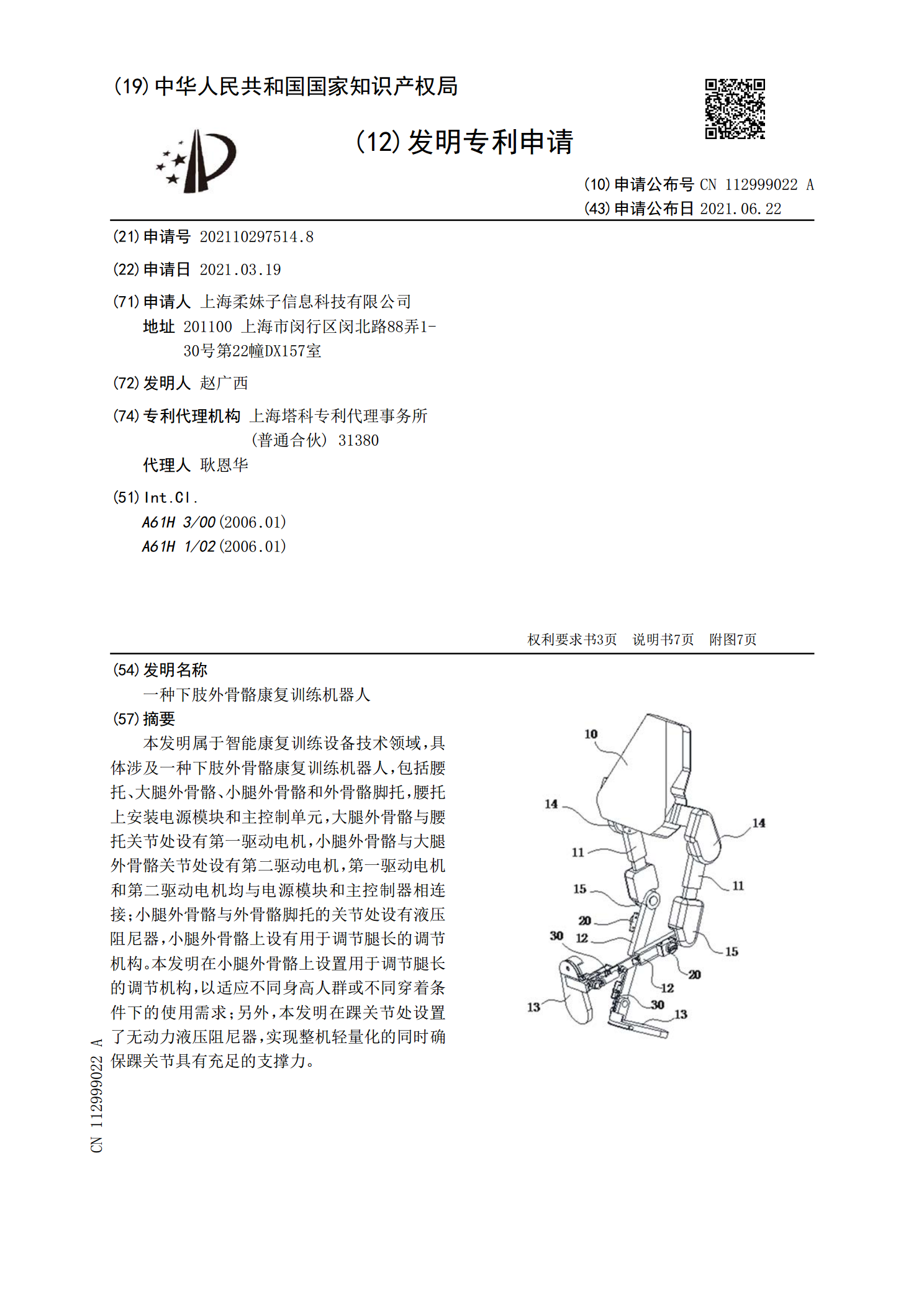
在本申请的实施例中提供了下肢康复训练外骨骼机器人以及控制方法,通过控制组件、用于辅助支撑所述患者腰部的腰部组件以及用于驱动所述患者下肢的驱动组件;所述控制组件固定于所述腰部组件上;所述腰部组件的两侧分别可拆卸连接有一组所述驱动组件,且所述驱动组件与所述控制组件电性连接;所述驱动组件分别设有能够独立转动角度且对应于所述患者下肢关节的髋关节驱动部、膝关节驱动部和踝关节驱动部。通过患者自身的运动意图实现主动式康复训练;机器人采用了轻量化的设计,使得质量更轻;并且可根据患者情况,灵活选择使用双侧外骨骼还是单侧外骨
一种外骨骼可穿戴式下肢康复训练机器人装置.pdf
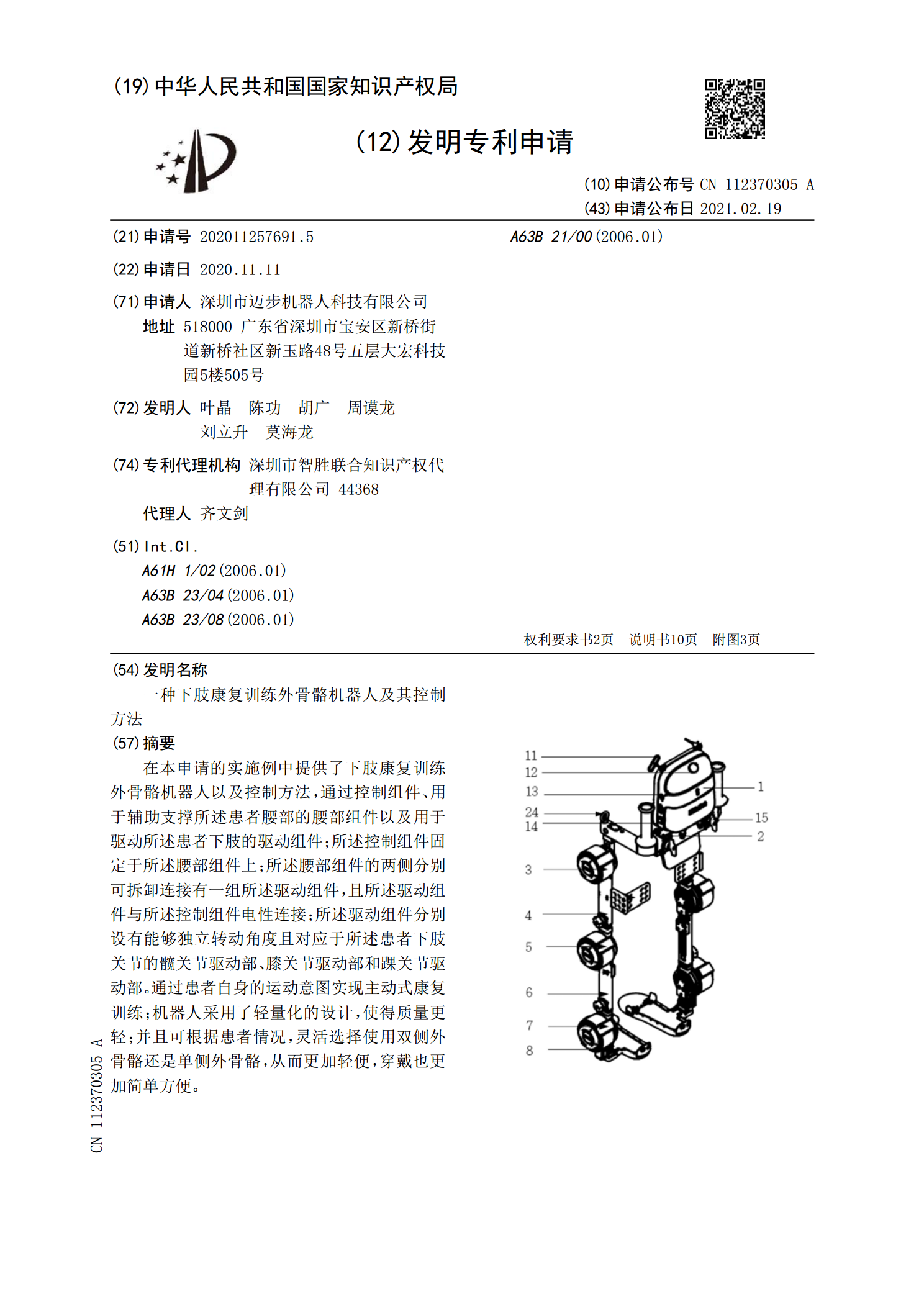
本发明公开了一种外骨骼可穿戴式下肢康复训练机器人装置。本装置主要包括左支撑架、右支撑架、前夹腰板、后夹腰板、大腿外套、小腿外套、连接板、脚踏板、脚趾板、气缸、销轴、紧定螺钉、螺栓、弹簧片等,其特征在于:前夹腰板、后夹腰板与大腿外套构成3-RPS并联机构,小腿外套与脚踏板构成2自由度空间六杆机构,整个装置是通过大腿外套与小腿外套之间的转动副将两部分串联而成的串并混联机构。本装置结构简单,体积小,功能全,成本低,安全舒适,训练效率高,能起到理疗和康复下肢髋、膝、踝关节的作用。本装置可用于神经损伤或者肢体损伤的
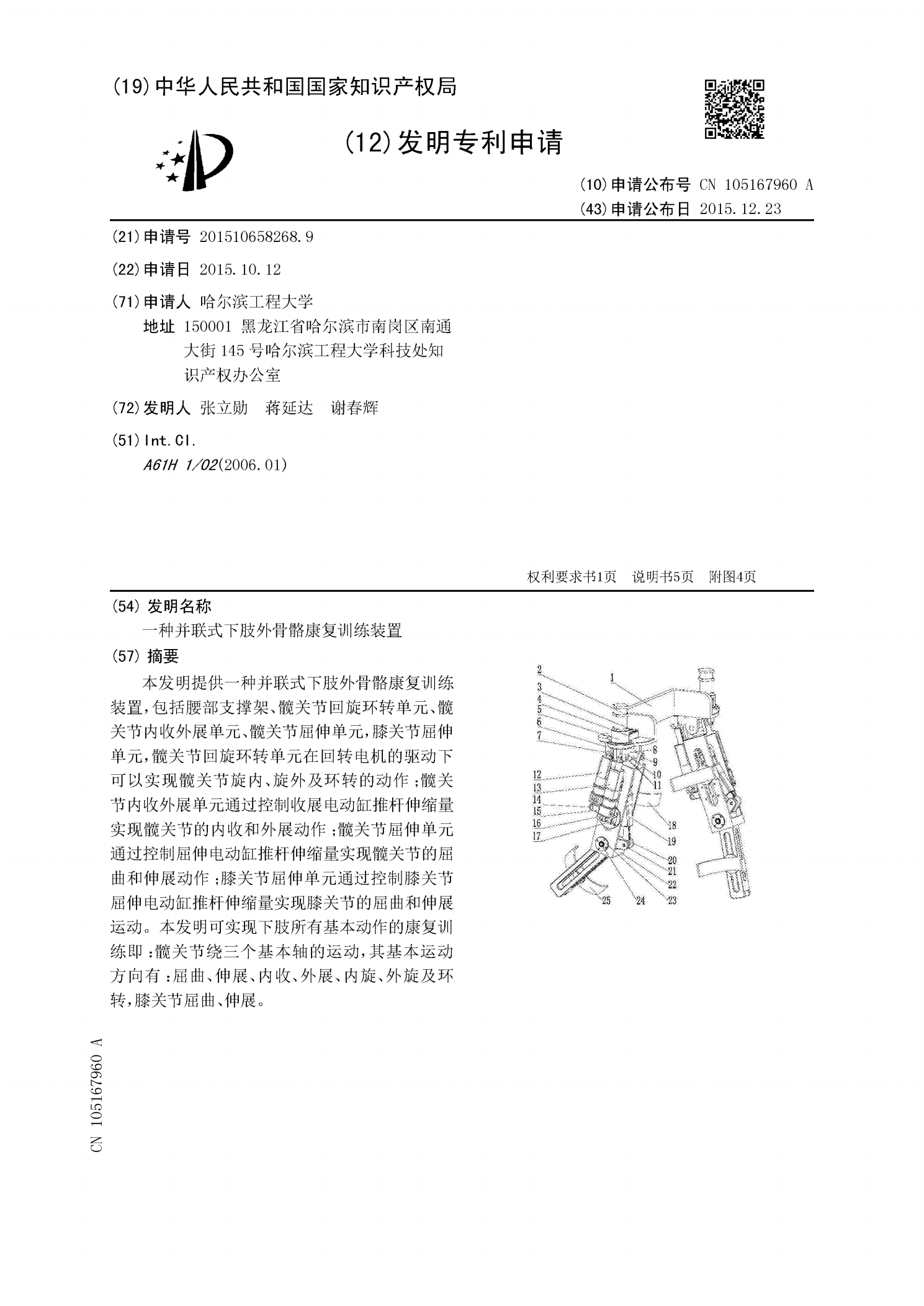
一种并联式下肢外骨骼康复训练装置.pdf
本发明提供一种并联式下肢外骨骼康复训练装置,包括腰部支撑架、髋关节回旋环转单元、髋关节内收外展单元、髋关节屈伸单元,膝关节屈伸单元,髋关节回旋环转单元在回转电机的驱动下可以实现髋关节旋内、旋外及环转的动作;髋关节内收外展单元通过控制收展电动缸推杆伸缩量实现髋关节的内收和外展动作;髋关节屈伸单元通过控制屈伸电动缸推杆伸缩量实现髋关节的屈曲和伸展动作;膝关节屈伸单元通过控制膝关节屈伸电动缸推杆伸缩量实现膝关节的屈曲和伸展运动。本发明可实现下肢所有基本动作的康复训练即:髋关节绕三个基本轴的运动,其基本运动方向有
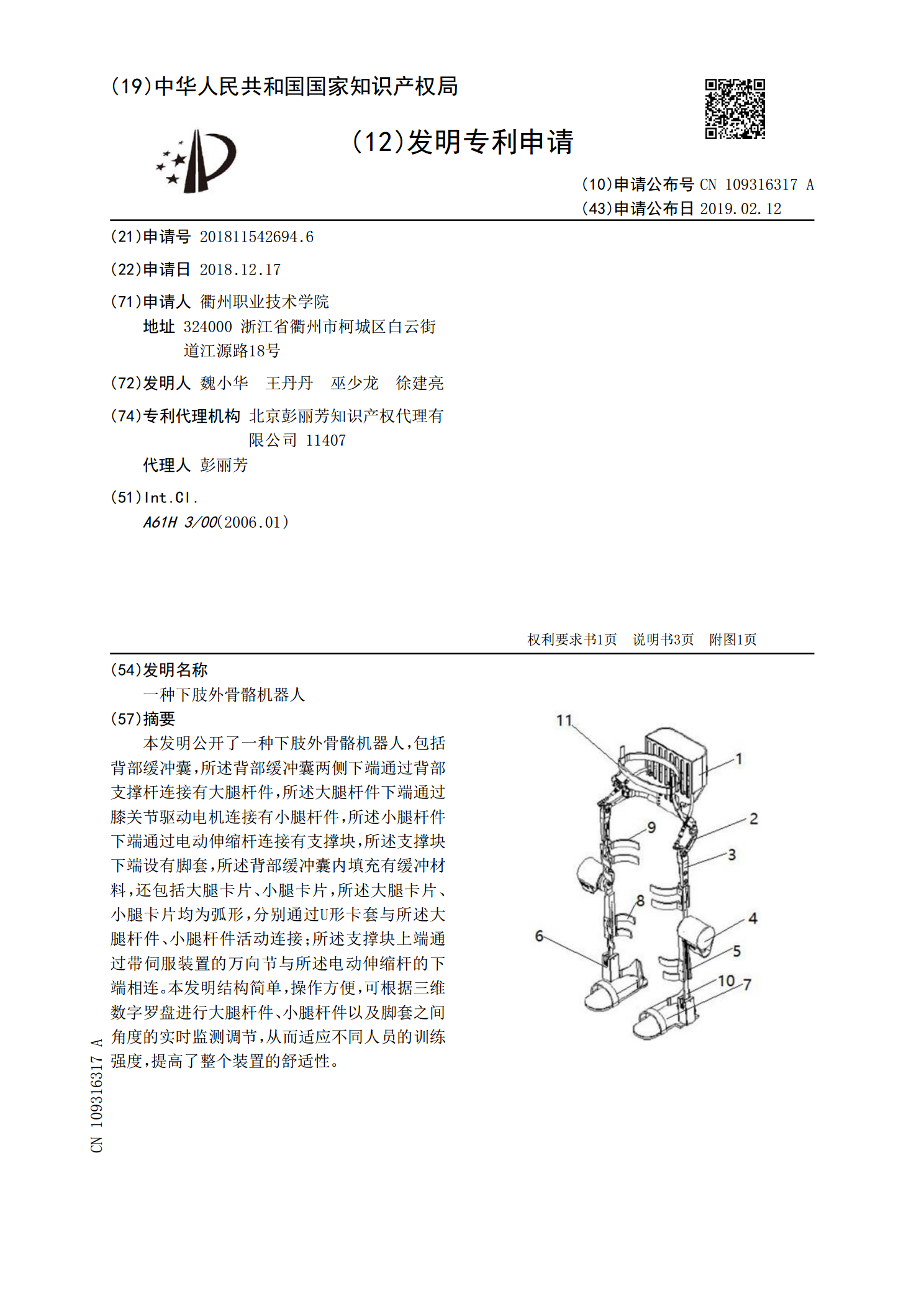
一种下肢外骨骼机器人.pdf
本发明公开了一种下肢外骨骼机器人,包括背部缓冲囊,所述背部缓冲囊两侧下端通过背部支撑杆连接有大腿杆件,所述大腿杆件下端通过膝关节驱动电机连接有小腿杆件,所述小腿杆件下端通过电动伸缩杆连接有支撑块,所述支撑块下端设有脚套,所述背部缓冲囊内填充有缓冲材料,还包括大腿卡片、小腿卡片,所述大腿卡片、小腿卡片均为弧形,分别通过U形卡套与所述大腿杆件、小腿杆件活动连接;所述支撑块上端通过带伺服装置的万向节与所述电动伸缩杆的下端相连。本发明结构简单,操作方便,可根据三维数字罗盘进行大腿杆件、小腿杆件以及脚套之间角度的实